
Description
Driver to be used to decode roll-pitch-heave observations from a Seapath (or MRU) motion reference unit outputting so-called Sounder Sentence ASCII messages.
-
No heading observation is part of the message, only roll, pitch and heave.
-
There are three versions of this driver, a serial one, a network UDP and a network TCP version. Decoding is the same for all.
-
When your motion reference unit outputs the NMEA $PSXN format, please use the driver as found in the related pages.
Driver Information
|
Driver |
Seapath MRU Sounder Sentence |
Interface Type |
Serial |
Driver Class Type |
Terminated <LF> |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
DrvQPSTerminatedTCP.exe SEAPATH_SOUNDER |
|
|
Related Systems |
|
||||
|
Related Pages |
Seapath MRU NMEA (PSXN) - 03
|
||||
Database Setup
-
In order to decode the motion, add to your template setup a Pitch Roll Heave Sensor system and select driver
"Seapath MRU Sounder Sentence" or "Network (UDP/TCP) - Seapath MRU Sounder Sentence" for the network variant.
Fill in the correct I/O parameters and press Next to go to the next wizard page.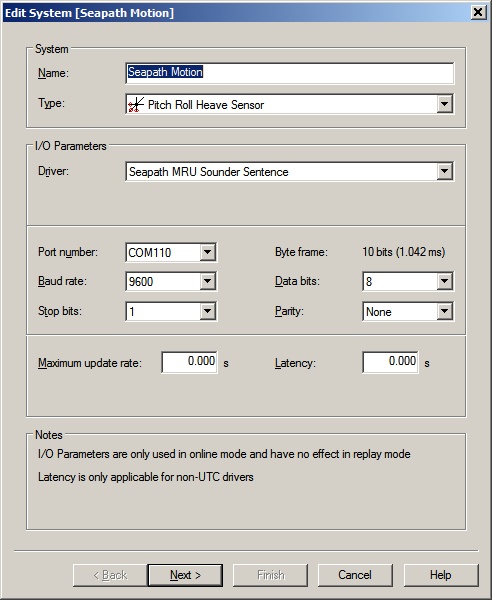
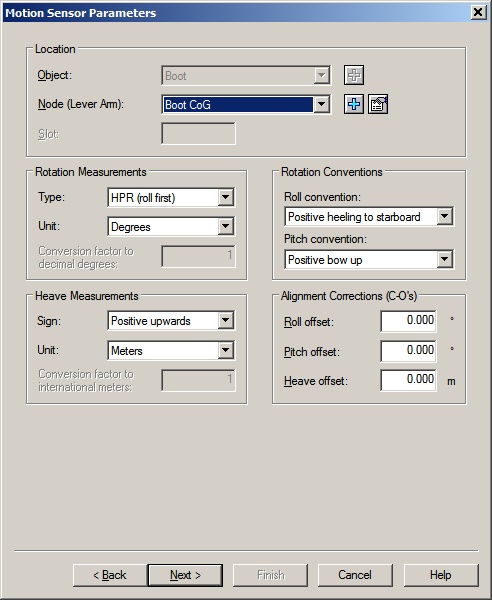
Leave the settings at the defaults on the Motion Sensor Parameters page:
Unit: Degrees, Roll convention: Positive heeling to starboard, Pitch convention: Positive bow up and Heave Sign: Positive upwards.
The driver automatically converts the decoded values to these conventions.
Decoding Notes
-
There is no quality information in the Sounder Sentence message about the observations, except for a warning character at column 14: Normally a space character, but when data is unstable it will be a '?' character.
Qinsy will not use data which is marked as unstable. When this happens the observation quality indicators will be -1.0 instead of 0.0. Note that these quality indicators can be monitored using an Observation Physics Display. -
There is no time information inside the message, so timing of the observation will be at time-of-arrival.
-
The driver will automatically convert the decoded values to the default Qinsy convention and unit.