In Qinsy there are 2 types of Drivers:
-
UTC Driver
-
Non-UTC Driver
A UTC driver decodes the time field from the message and uses this time field for the data.
A Non-UTC driver will not decode the time field, but will allocate a time value based on the arrival of the data.
For most sensors/systems there is either a UTC or a non-UTC driver, but from some systems you can choose the UTC option.
If both driver types are available the type will be between brackets. For example: "iXBlue Octans TAH" is a Non-UTC driver and "iXBlue Octans TAH (UTC)" is a UTC driver.
Since networks can have a variable delay, network drivers are mostly UTC drivers.
Time Stamping
The Qinsy time stamping mechanism is based on the 1 pulse per second (Time Synchronization) signal transmitted from GNSS receivers.
This signal is an electronic pulse lasting a specified amount of milliseconds. The corresponding UTC/ZDA time is sent over from the GNSS receiver and received by Qinsy.
The electronic pulse can be caught in a computer through a special device that converts the electronic pulse to a dedicated message that can be read via the computer I/O port.
QPS manufactures such a device. Combining the electronic pulse and the corresponding time value (UTC/ZDA) in Qinsy, a very accurate GPS-based UTC clock is generated.
The accuracy of this internal 1 Time Synchronization UTC clock has been proven to be better than 0.5 milliseconds.
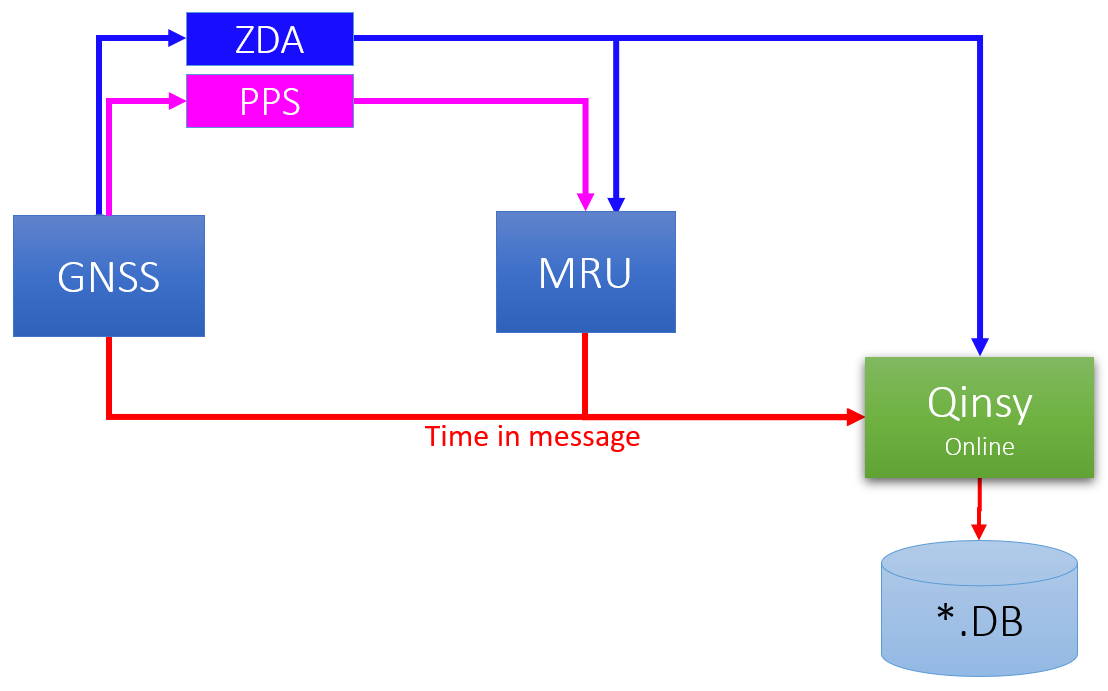
Non-UTC driver interface example
The scheme below shows a PPS (pulse per second) signal and ZDA message that are being transmitted from a GNSS receiver. The MRU does not receive any information about timing.
Qinsy does receive the PPS and ZDA message so is able to generate an accurate clock and allocate a time to the MRU data once received. This means a Non-UTC driver is advised to be used as the data will be timetagged on arrival.
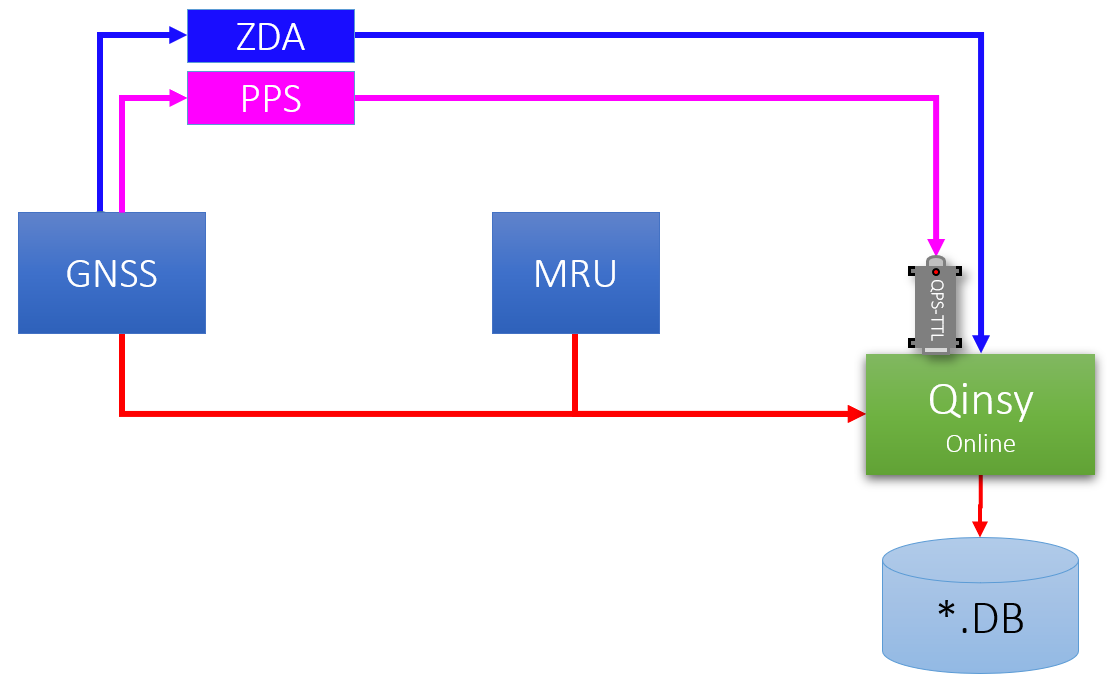
UTC driver interface example
The scheme below shows a PPS (pulse per second) signal and ZDA message that are being transmitted from a GNSS receiver, but in this case the MRU is interfaced with a PPS and ZDA.
A similar time stamping mechanism takes place in the MRU as explained in the section time stamping.
This results in a message from the MRU with a valid time field. Therefore, a UTC driver is advised to be used so that Qinsy will decode the time field.
If all time critical sensors are UTC drivers there is no need to interface a PPS with Qinsy.