
Description
Driver to be used to decode pitch angles of ladder elements, horizontal angle and pole displacement from the Jan D Nul Eco dredger.
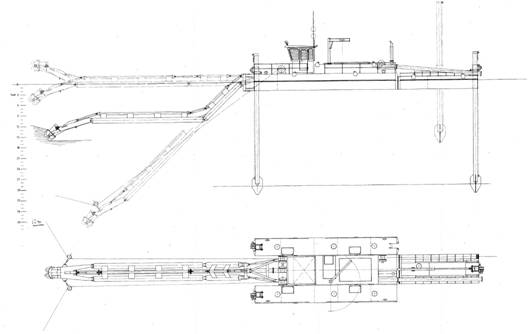
The ladder of the Eco Dredger contains of three elements, first element (element 1) is connected to pontoon.
The dredge head is located on the last element (element 3).
All elements have a pitch sensor (pendulum) located on them, these sensors measure the angle between the element and the horizontal equi-gravity plane.
Driver Information
|
Driver |
Jan de Nul Eco Dredger |
Interface Type |
Unknown |
Driver Class Type |
Terminated |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
DrvQPSTerminated.exe ECO_DREDGER |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Coding Notes
Decoding Notes
Driver will only decode if format specification as described above is met.
The angles are all converted to degrees inside the driver for user's convenience.
The pole displacement is decoded in centimeters and will be converted into meters. The sign will remain as it is.
The x= 0, y= offset of spud, z=0.
Note that roll is not decoded.
Qinsy Config
Database Setup
To decode the pitch information, add a 'Pitch,Roll,Heave System' for the three elements. Make sure to setup the correct slot numbers.
See slot number table below. Keep units on degrees, not radians, since conversion is done inside driver already.
Select same serial port number and communication parameters for all systems.
To decode the horizontal angle add a 'Surface Navigation System' (same port and comm. Parameters as above) and add an observation with type Angle.
Slot number for the angle is "4".
Set units to degrees.
To decode the pole displacements add an "USBL" system.
|
Slot Number |
Decoded field |
|
1 |
Pitch angle element 1 |
|
2 |
Pitch angle element 2 |
|
3 |
Pitch angle element 3 |
|
4 |
Horizontal Angle pontoon-element 1 |
Additional Info
Drivers IO Notes
ECO_DREDGER: decode eco dredger data.
Note that for this executable more options will be added in the future.