
Description
Driver which can be used to decode roll-pitch-heave, heading and/or lat-lon-height, velocity, and rate of turn observations from a Kongsberg Seatex Seapath MRU, outputting the Seapath Binary messages, in Format 23 or Format 26.
Driver Information
Decoding Notes
The Seapath MRU driver will reverse the sign of the heave so that +ve heave is up, as is standard in Qinsy. All units are converted to meters and degrees, respectively.
The protocol contains status flags for some observations.
Based on these flags, the observations can have the following quality indicators:
|
Status flag |
Quality indicator |
|---|---|
|
None (OK) |
0.0 or +1.0 |
|
Reduced |
+0.1 |
|
Invalid |
-1.0 |
All drivers have an "NOCS" version. If this version of the driver is selected, the driver will not verify the checksum in the message.
If it is enabled, the checksum will be verified and the data will be discarded if the checksum is incorrect.
System Interfacing
GPS Page 1
First thing to do after starting up the Seapath Operator software is to set the IP range Accordingly.
Operator SW is now available to change the IP adress of the Seapath unit. Make sure it is within range of all the other hardware.
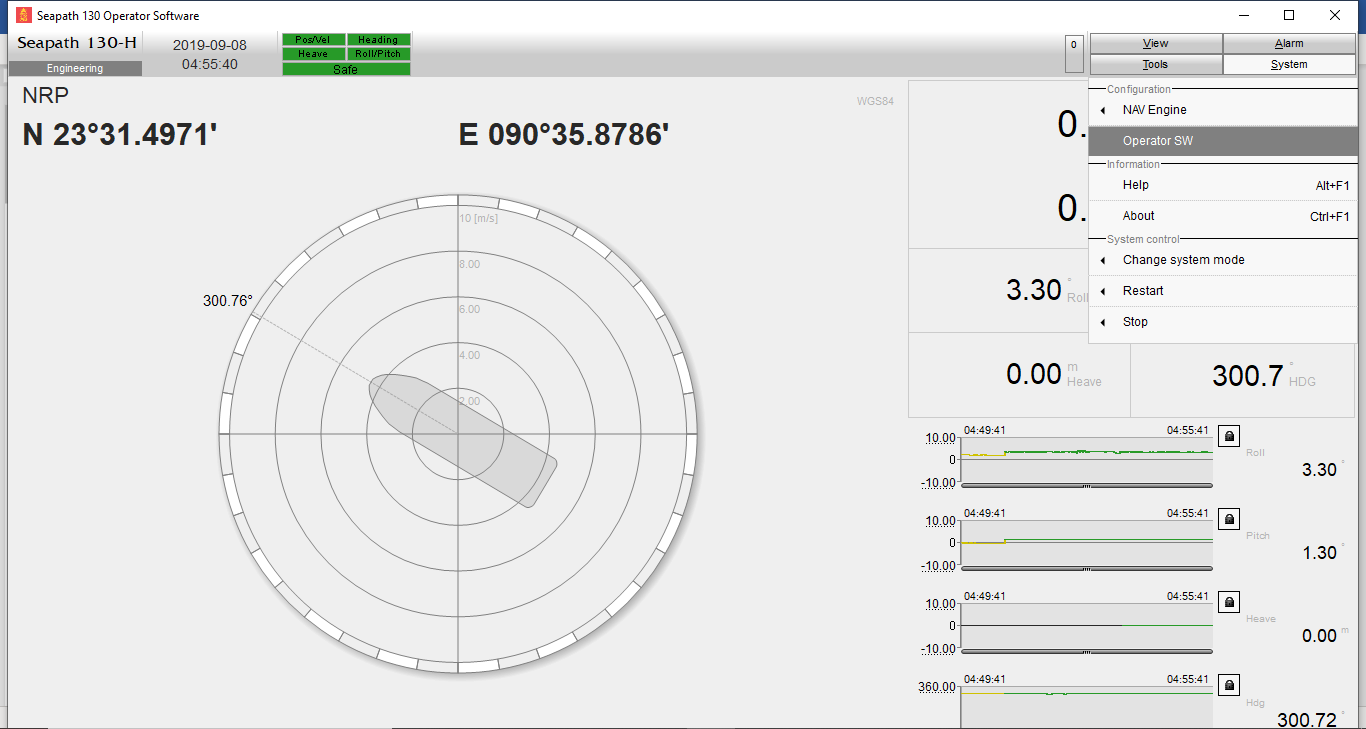
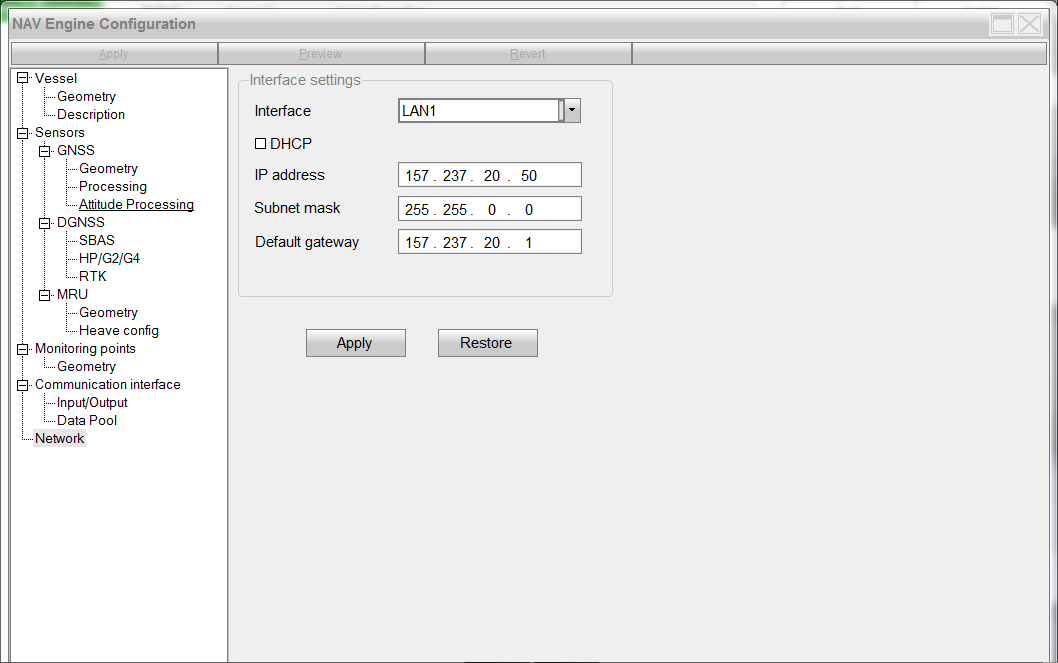
Make sure to change the IP address in the same range as the other hardware
Restart
Restart the software to make the change work
System Configuration
The configuration can be changed under System, Nav Engine.
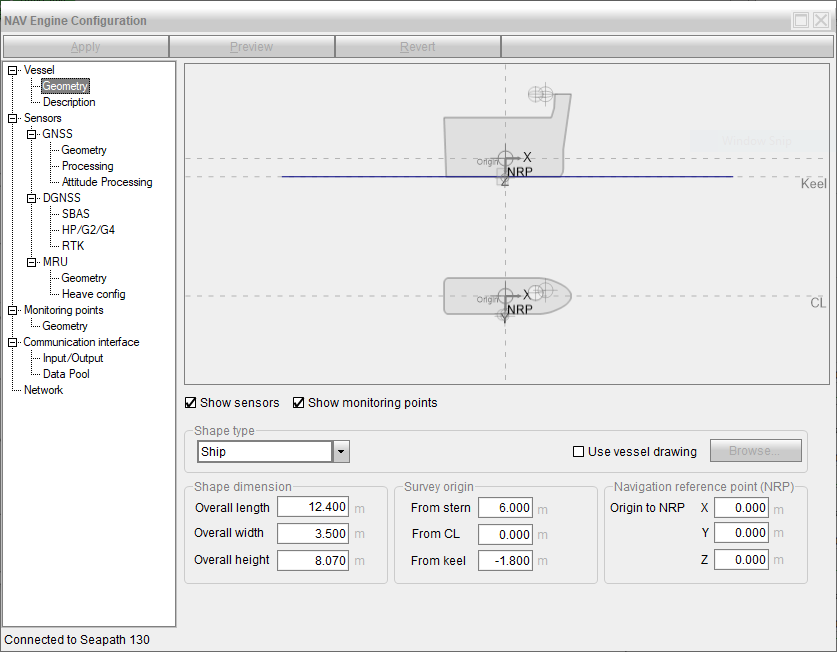
Vessel Geometry
Set up the Vessels Geometry and reference location:
|
Shape Type |
Ship |
|---|---|
|
Shape Dimension |
Rough Geometry |
|
Survey Origin |
Reference location for the Sensor |
|
NRP |
Navigation Reference Point, optional offset referenced to the Survey Origin |
Sensors - GNSS
Set up the GNSS and potential Height and Heading offset
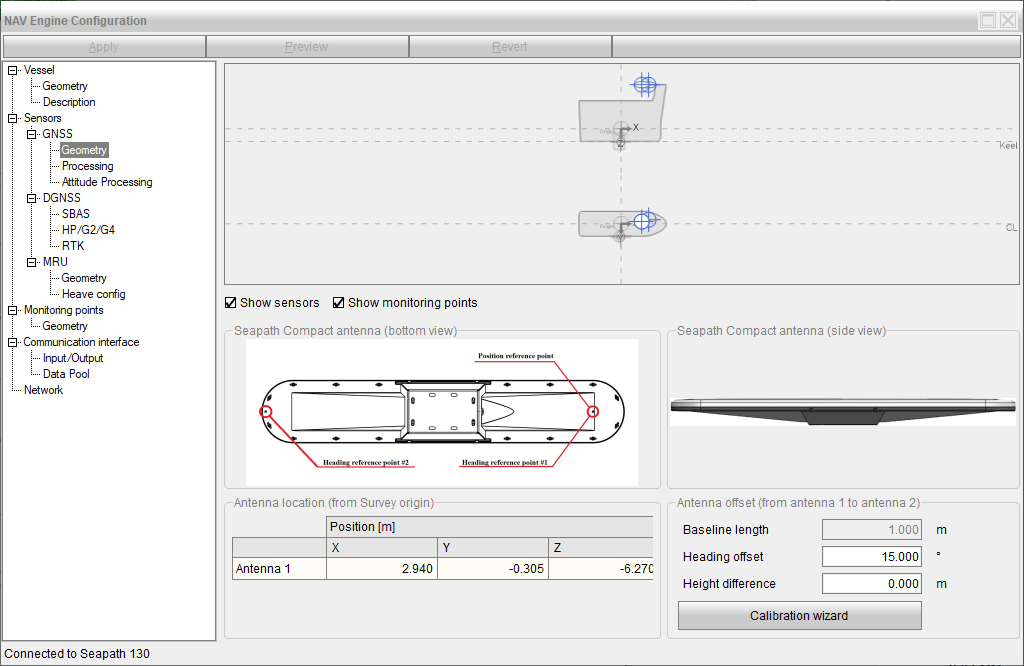
|
Antenna 1 |
Antenna location referenced to the Survey Origin |
|---|---|
|
Heading offset |
Offset relative to the Ship reference |
|
Height difference |
Difference in height from Antenna 1 to 2 |
|
Calibration Wizard |
Calibration to retrieve the heading and height offset |
Sensor - MRU
Set up the Sensor location and Mounting angles
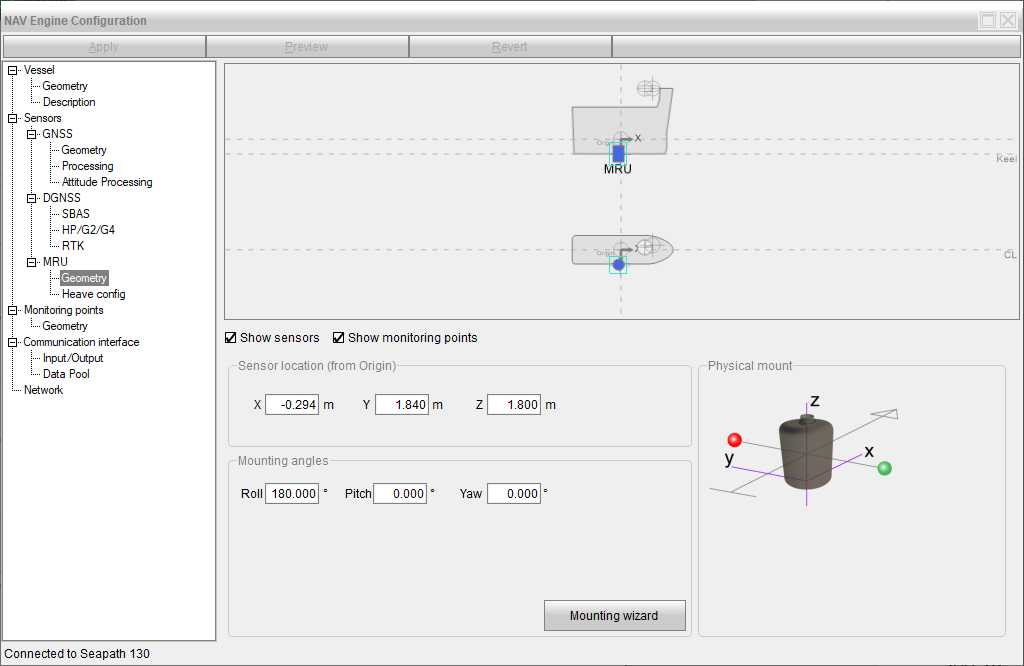
|
Sensor location |
Location of MRU relative to Origin |
|---|---|
|
Mounting angles |
Orientation of the MRU relative to the ship's frame |
MRU Info
Keep the Origin and MRU location in mind when setting up the offset in Qinsy (for which location are you outputting motion/position to Qinsy)
-
Preferably offsets are entered in the MRU and the output is set for the CoG in Qinsy
Output
Set the appropriate outputs to Qinsy, either Serial or Network:
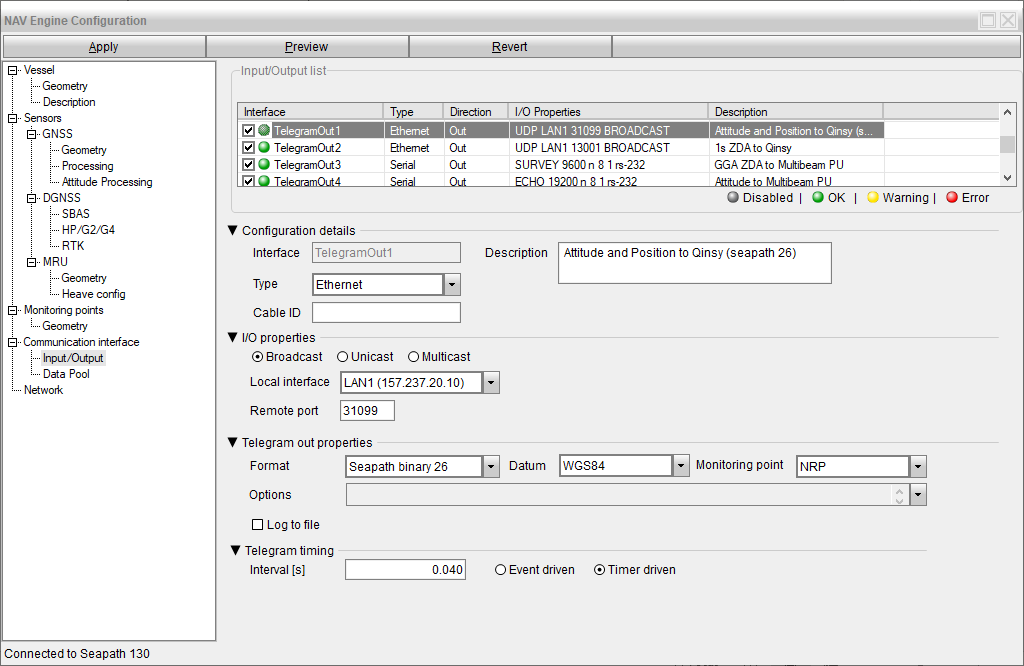
|
Type |
Ethernet or Serial |
|
|---|---|---|
|
IO Properties |
Broadcast |
Unicast and Multicast aren't supported for this driver |
|
Remote Port |
Example: 31099 |
This port number is used in Qinsy |
|
Format |
Seapath 23/Seapath 26 |
Seapath 26 will allow to automatically record delayed heave in the Qinsy 'Import' folder. For this you need to define a miscellaneous system in your template setup. |
|
Monitoring Point |
Output location |
Make sure that the selected output location identical to the Qinsy node location |
|
Interval (s) |
25-50Hz (0.04 - 0.02) |
Preferred output rate |
Database Setup
Position navigation system
GPS Page 1
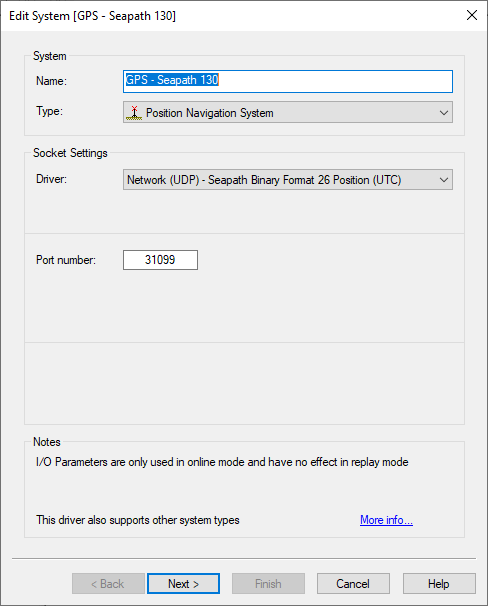
|
Name |
For example: "GPS - Seapath 130" |
|---|---|
|
Type |
Position Navigation System |
|
Driver |
Network (UDP) - Seapath Binary Format 26/23 Position (UTC) or Seapath Binary Format 26/23 Position (UTC) |
|
Port number |
As set up in the Seapath system |
GPS Page 2
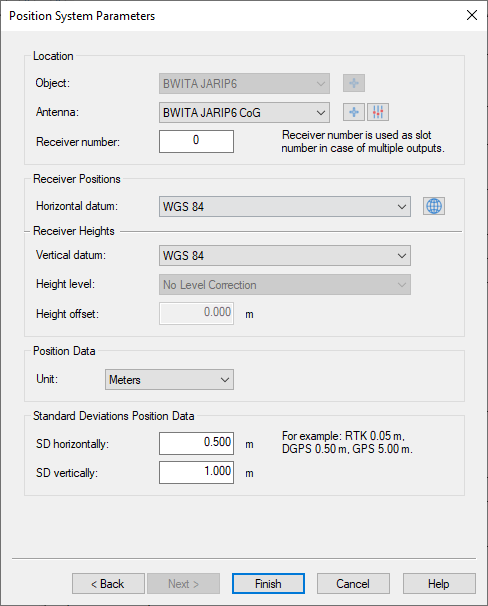
|
Antenna |
Reference location, set as output in the Seapath system |
|---|---|
|
Datum |
Reference datum as set up in the Seapath system |
To decode the position (Lat/Lon/Height), add a system of type "Position Navigation System", select the same driver name and the same I/O parameters as for the other systems and define the antenna node and reference datum.
Gyro compass system
Gyro Page 1
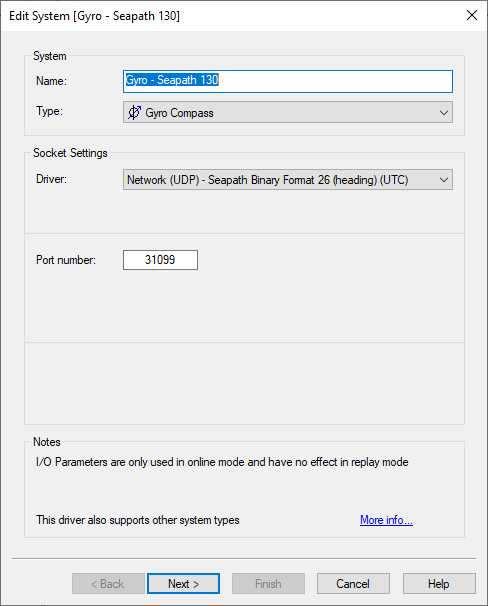
|
Name |
For example: "Gyro - Seapath 130" |
|---|---|
|
Type |
Gyro Compass |
|
Driver |
Network (UDP) - Seapath Binary Format 26/23 (heading)(UTC) or Seapath Binary Format 26/23 (heading) (UTC) |
|
Port number |
As set up in the Seapath system |
To decode the heading, add a system of type "Gyro and Compasses", select the appropriate driver, and define the heading parameters.
Pitch roll heave system
MRU Page 1
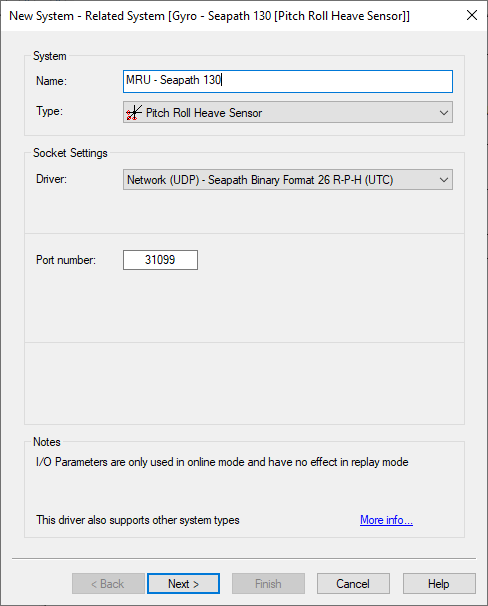
|
Name |
For example: "MRU - Seapath 130" |
|---|---|
|
Type |
Pitch Roll Heave Sensor |
|
Driver |
Network (UDP) - Seapath Binary Format 26/23 R-P-H (UTC) or Seapath Binary Format 26/23 R-P-H (UTC) |
|
Port number |
As set up in the Seapath system |
MRU Page 2
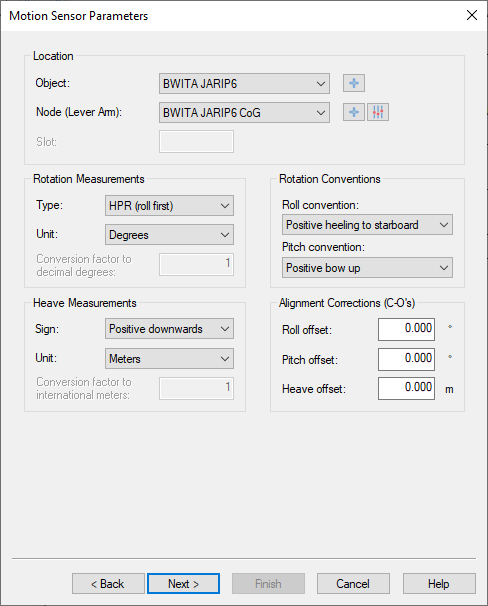
|
Node (Lever Arm) |
Monitoring Location as set in the Seapath software |
|---|
Rotation/Heave convention:
|
Observation |
Positive when |
|---|---|
|
Roll |
Port up |
|
Pitch |
Bow up |
|
Heave |
Downward |
To decode the pitch, roll and heave, add a system of type "Pitch, Roll and Heave sensor" to the Qinsy database and make sure to select the same driver name and the same I/O parameters as for the Gyro system.
Velocity & rate of turn
To decode velocity and/or rate of turn, add an "Acceleration, Velocity & Rotation rate" system to the setup and add the appropriate observations.
Add an observation of type "ROV Depth". The driver will automatically reverse the sign of the decoded height, in order to make it a 'depth'.
Miscellaneous System
Add a miscellaneous system to your setup and select driver “Seapath Binary Format 26 (Delayed Heave)”, “Network (UDP) - Seapath Binary Format 26 (Delayed Heave)” or “Network (TCP) - Seapath Binary Format 26 (Delayed Heave)”.
Use the same I/O parameters as for the others. On the 2nd wizard page there is no need to add an observation so you can skip the warning message and continue to finish this setup dialog.
Extra info
The binary 26 protocol contains delayed heave.
If this protocol is used, the delayed heave data will be stored in your project folder under the 'Import' subfolder.
As soon as you go on-line, and valid post-processed delayed heave data is decoded by the driver, a binary file will be created in your project's Import folder, containing all incoming Seapath Binary Format 26 messages.
At the same time an ASCII file is created in the same folder with the same filename, but with extension *.txt. This file contains a readable representation of the Seapath Binary Format 26 Delayed Heave data.
NOCS
NOCS stands for No Check Sum.
This will basically decode the message regardless of the status flag (see: Coding Notes)