
Description
This driver will decode LUSBL measurements from the Sonardyne LUSBL unit with firmware version 6.
The driver decodes transponder position (computed delta Easting / delta Northing / delta Depth relative to vessel), vessel pitch, vessel roll, vessel bearing and transponder depth.
For time-tagging purposes the time from the USBL and Depth strings will be used if the driver option '+ UTC' has been chosen.
If the driver without the option '+ UTC' has been chosen, local computer time (or PPS if it is connected to Qinsy) will be used for time-tagging.
If you want to decode transponder position, vessel pitch, vessel roll, vessel bearing and transponder depth, make sure to select the same driver option in Database Setup when adding systems of these types.
Driver Information
|
Driver |
Sonardyne (Surveyors Output) |
Interface Type |
Serial |
Driver Class Type |
Terminated |
|---|---|---|---|---|---|
|
Yes and No |
Input / Output |
Input |
Executable |
DrvUsblTerminated.exe SONARDYNE_ASCII_V6 |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Coding Notes
Decoding Notes
Flag value is zero in case of bad data, otherwise different than zero.
System Interfacing
Interfacing Notes
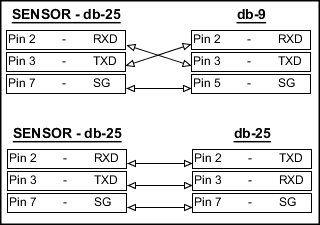
Type of cable wiring (two-way).
Cable wiring diagrams:
|
DB-25 |
Sensor |
|
DB-9 |
COM |
|
DB-25 |
COM |
|---|---|---|---|---|---|---|---|
|
Pin 2 |
RXD |
--- |
Pin 3 |
TXD |
|
Pin 2 |
TXD |
|
Pin 3 |
TXD |
--- |
Pin 2 |
RXD |
|
Pin 3 |
RXD |
|
Pin 7 |
SG |
--- |
Pin 5 |
SG |
|
Pin 7 |
SG |
Unknown Attachment
Qinsy Config
Database Setup
USBL Setup:
To decode the delta Easting, delta Northing and delta Depth observations, add a variable node for the USBL transponder. Add a "System" of type "USBL System", and select the Sonardyne USBL (Surveyors Output) driver if you want to use local computer time or PPS if it is connected to Qinsy for time-tagging. Select the Sonardyne USBL + UTC (Surveyors Output) driver if you want to use the time from the data string for time-tagging. There is no need to define the three observations separately, since they are automatically added and connected to the system. The slot number corresponds to the transponder index, which should be unique.
USBL Gyro Setup:
To decode the vessel's bearing observation, add a system of type "Gyro's and compasses", and select the Sonardyne Hdg (Surveyors Output) driver if you want to use local computer time or PPS if it is connected to Qinsy for time-tagging. Select the Sonardyne Hdg + UTC (Surveyors Output) driver if you want to use the time from the data string for time-tagging.
USBL VRU Setup:
To decode the vessel's pitch and roll observations, add a system of type "Pitch, roll and heave sensor", and select the Sonardyne (P-R) (Surveyors Output) driver if you want to use local computer time or PPS if it is connected to Qinsy for time-tagging. Select the Sonardyne (P-R) + UTC (Surveyors Output) driver if you want to use the time from the data string for time-tagging. There is no need to define the two observations separately, since they are automatically added and connected to the system.
USBL Depth Setup:
To decode the transponder depth, add a system of type "Underwater Sensor", and select the Sonardyne Depth (Surveyors Output) driver if you want to use local computer time or PPS if it is connected to Qinsy for time-tagging. Select the Sonardyne Depth + UTC (Surveyors Output) driver if you want to use the time from the data string for time-tagging. Add an "Observation" of type "ROV depth" to the system.
The slot number corresponds to the transponder node index, which should be unique.