
Selecting Raw Data Items
These are the items under Raw Data.






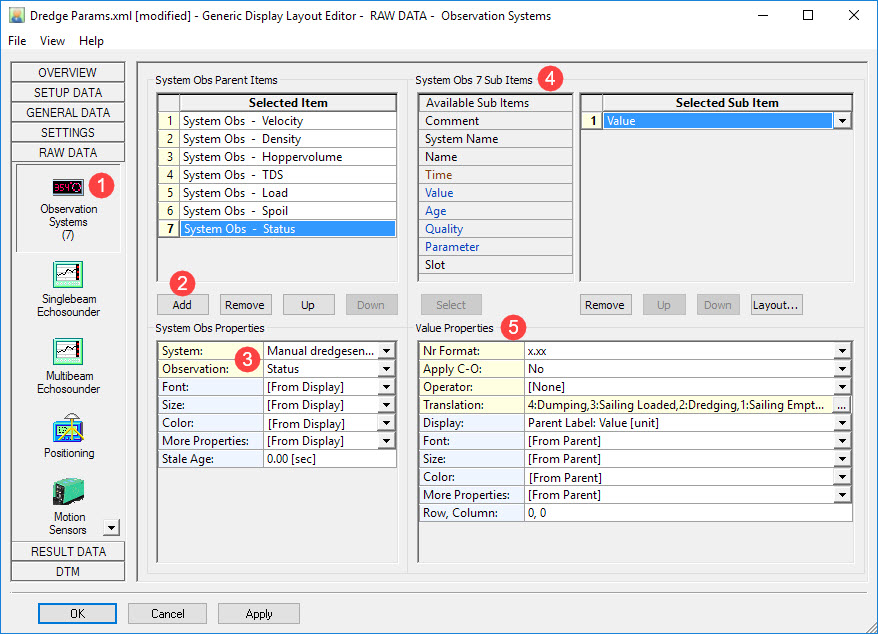
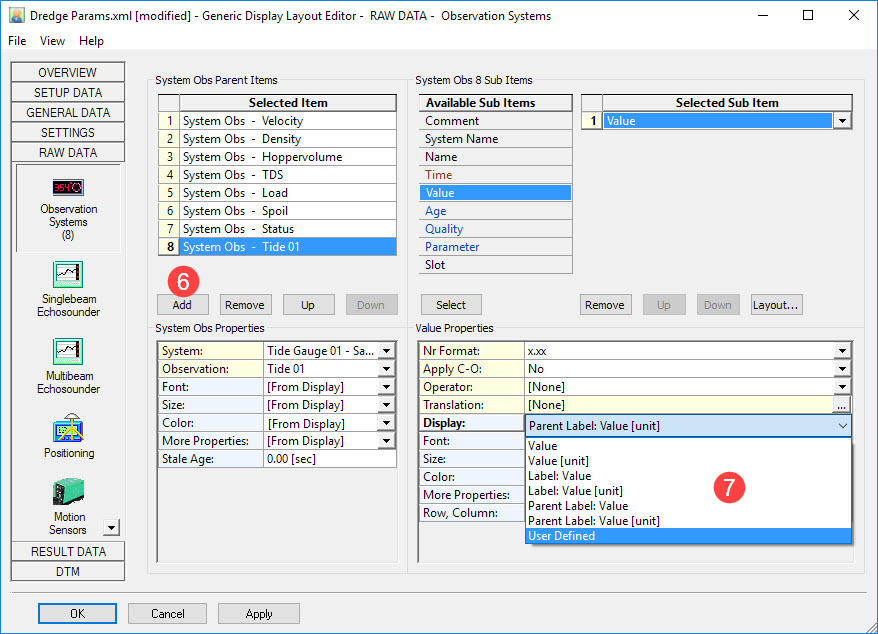
Observation Systems
Refer to for more information on Observation System parameters.


This entry 

|
|
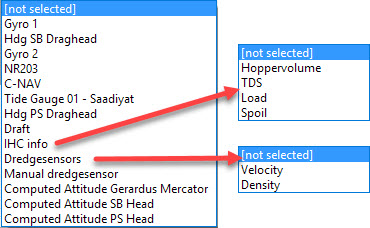
These are the systems in our example. The individual observations for two of the systems are shown.


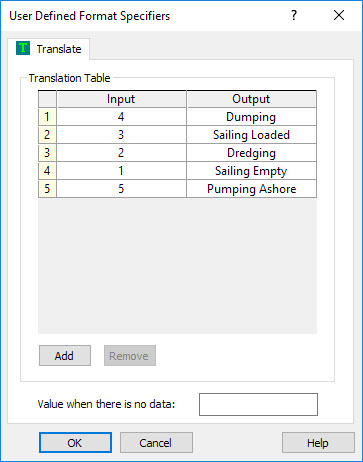


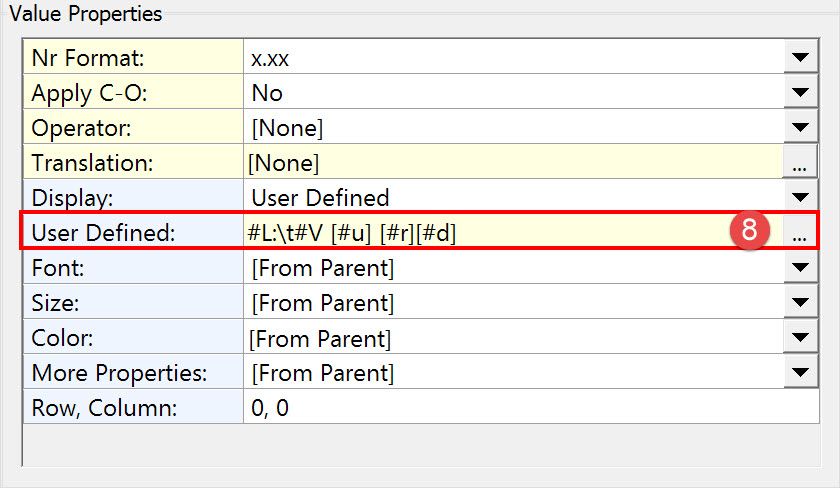

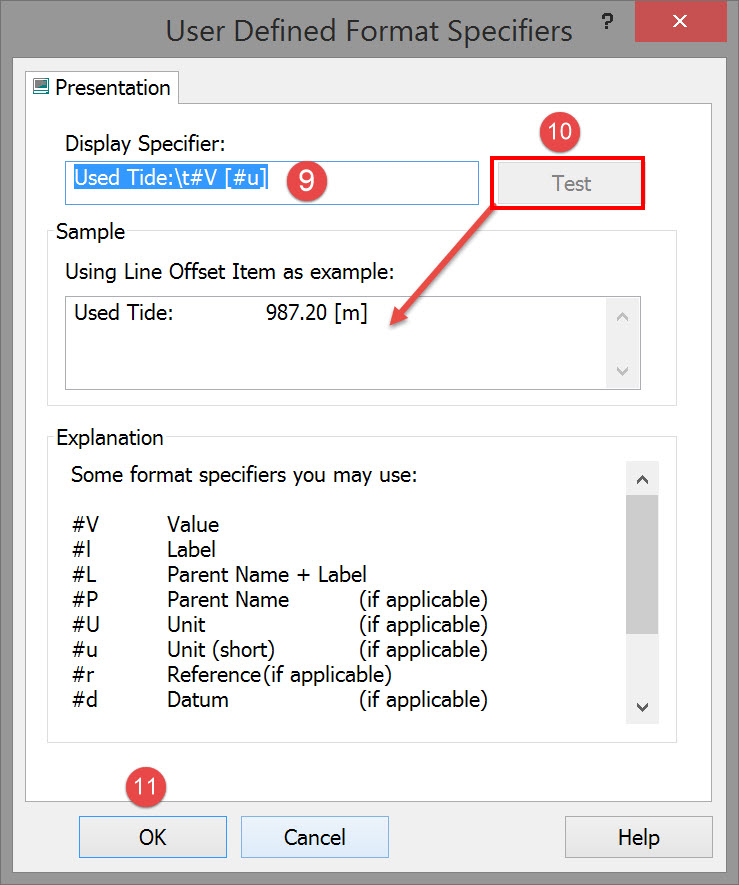



Refer to for more information on format specifiers.
Refer to for an explanation of operators acting on data values.
Return to top of page.
Singlebeam Echosounder
No singlebeam echosounder is defined in our example.
These are the sub-items:
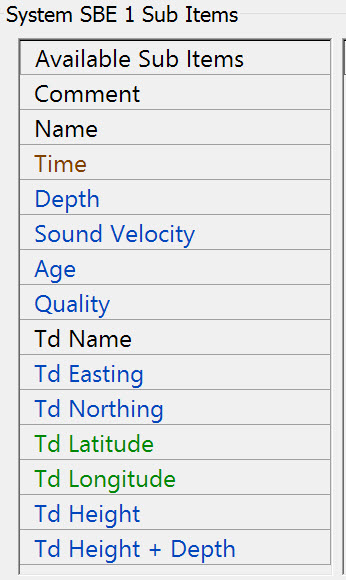
Refer to for more information
Return to top of page.
Multibeam Echosounder
List with all available multibeam and multi-transducer echosounder systems that exist in the current selected QINSy database.
Because different types of multibeam echosounder systems are supported (Ro/Theta, X/Y/Z, Profilers) and multi-transducer systems, some items below may not be applicable for the concerned type.
No multibeam echosounder is defined in our example.
These are the sub-items:
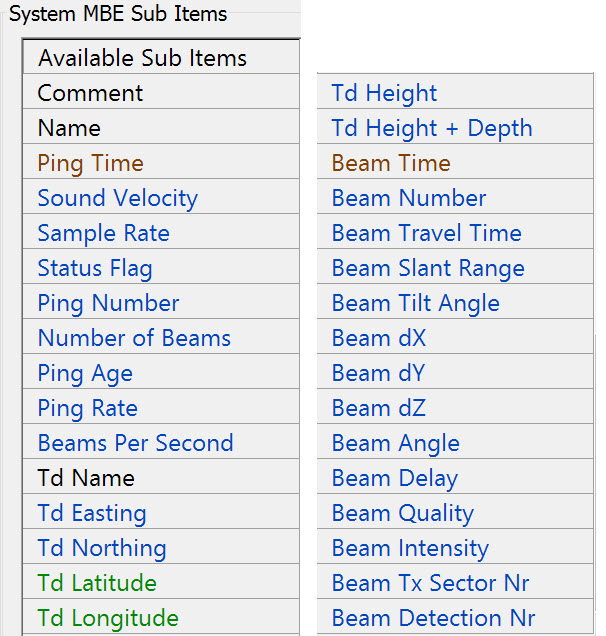
Refer to for more information.
Return to top of page.
Positioning
Positioning here refers to raw data and results data is preferred.
These are the raw data sub-items:
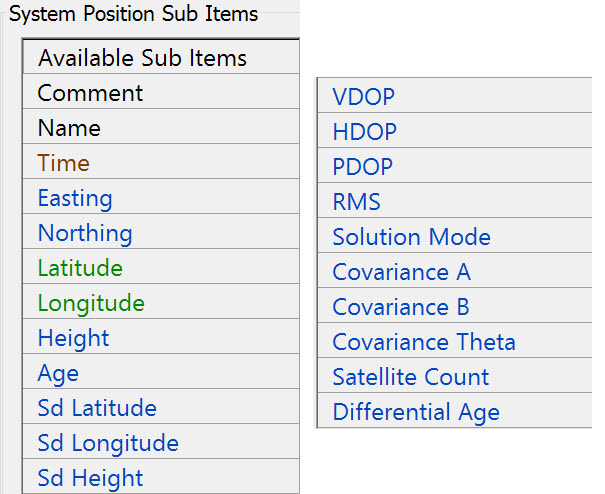
Refer to for more information.
Return to top of page.
Motion Sensors

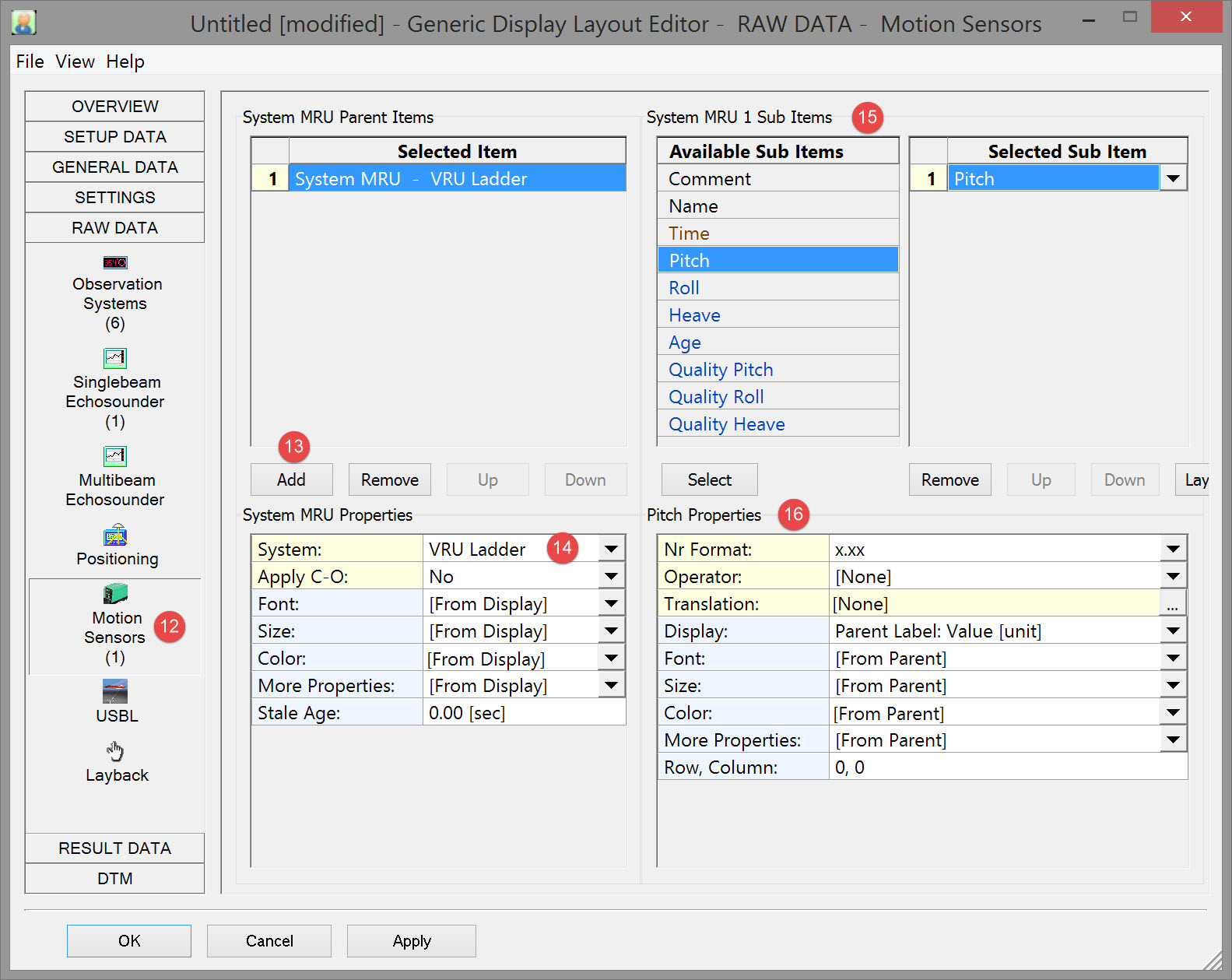




Refer to for more information.
Return to top of page.
USBL
QINSy is likely receiving the positioning of drag head(s) in the form of pseudo USBL measurements, i.e. a dX/dY/dZ measurement from the dredger's CoG point to the drag head. Displaying these measurement may be useful.

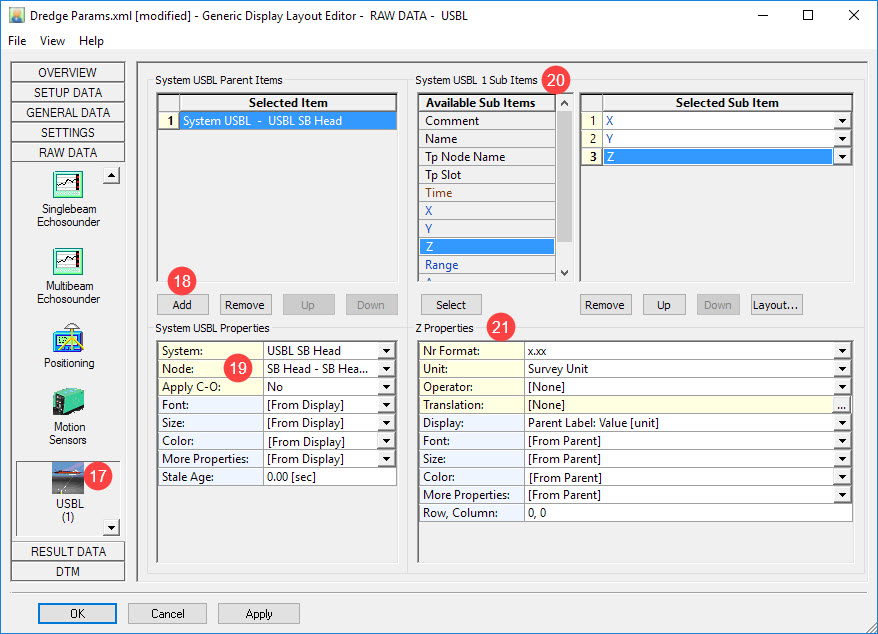




Refer to for further explanation.
Return to top of page.
Layback
No Layback system is defined in our example.
These are the sub-items:
Refer to for more information.
Return to: top of page
Return to: TSHD - Generic Display