| Sub Item | Description | Value Type | Properties |
|---|
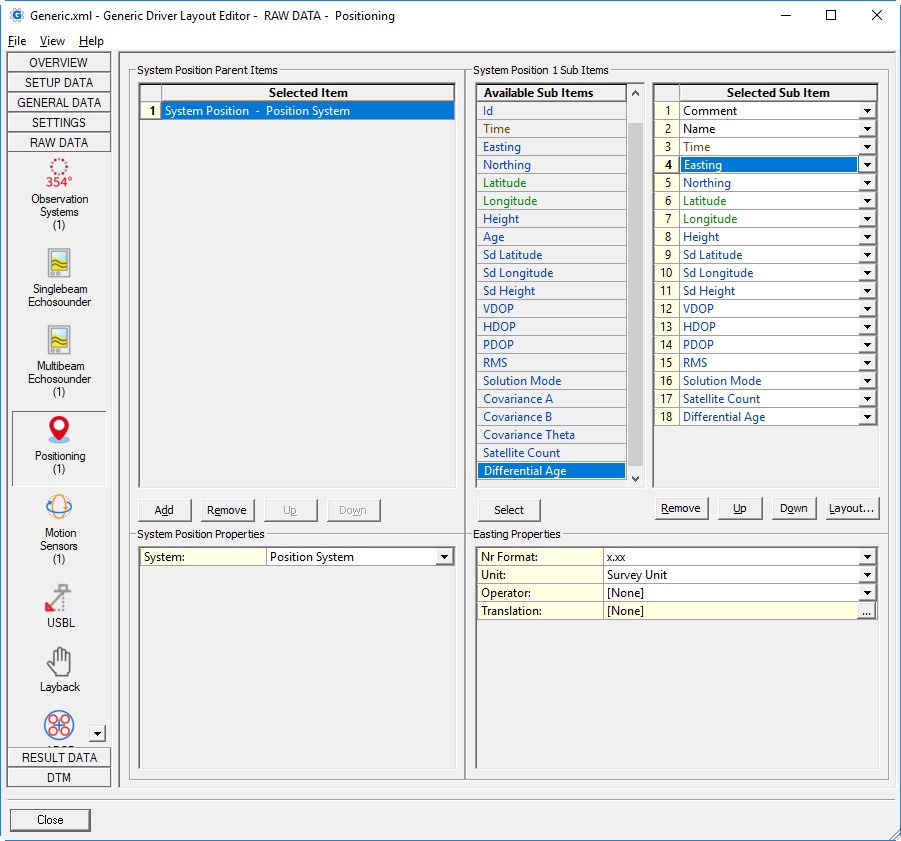
| Comment | User-defined free text | text |
|
| Name | Name of the Position Navigation System, as defined in Databaes Setup | text |
|
| Time | Time of the last raw update | time |
|
| Easting | The latitude, longitude and height, as outputted by the system, converted to grid co-ordinates, and always on current survey datum | double |
|
| Northing | The latitude, longitude and height, as outputted by the system, converted to grid co-ordinates, and always on current survey datum | double |
|
| Latitude | Latitude as outputted by the system | geo |
|
| Longitude | Longitude as outputted by the system | geo |
|
| Height | Height as outputted by the system.
Notice that the vertical datum reference is as defined in the system's setup in Database Setup | double
|
|
| Age | The difference between the triggering time and the time of the last raw update (see above).
Normally always a positive value in seconds. | Note that the Age value for export will be the difference between the time of the current observation and the previous exported one. | Formula: - Online (Generic Display, Generic Output Driver, Generic ASCII Logger)
Age = Triggering time - Observation time - Offline (Generic Export)
Age = Observation time - Previous observation time
|
| double
|
|
| Sd Latitude | The standard deviation of the latitude, as outputted by the system.
Notice that not every positioning system may output an Sd, in that case the value will be empty.
Consult the Drivers & Interfacing manual to see if this item is supported by the selected system/driver. | double
|
|
| Sd Longitude | The standard deviation of the longitude, as outputted by the system.
Notice that not every positioning system may output an Sd, in that case the value will be empty.
Consult the Drivers & Interfacing manual to see if this item is supported by the selected system/driver. | double
|
|
| Sd Height | The standard deviation of the height, as outputted by the system.
Notice that not every positioning system may output an Sd, in that case the value will be empty.
Consult the Drivers & Interfacing manual to see if this item is supported by the selected system/driver. | double
|
|
| VDOP | The Vertical Dilution Of Precision, as outputted by the system.
Notice that not every positioning system may output DOP's, in that case the value will be empty.
Consult the Drivers & Interfacing manual to see if this item is supported by the selected system/driver. | double
|
|
| HDOP | The Horizontal Dilution Of Precision, as outputted by the system.
Notice that not every positioning system may output DOP's, in that case the value will be empty.
Consult the Drivers & Interfacing manual to see if this item is supported by the selected system/driver. | double
|
|
| PDOP | The Position Dilution Of Precision, as outputted by the system.
Notice that not every positioning system may output DOP's, in that case the value will be empty.
Consult the Drivers & Interfacing manual to see if this item is supported by the selected system/driver. | double
|
|
| RMS | The Root Mean Square (1 Sigma, 68% Level).
The value as outputted by the selected Positioning System, or when this is not outputted, it will be calculated using the standard deviations of the lat, lon and height:
Formula:
RMS = SquareRoot ( Sd Lat * Sd Lat + Sd Lon * Sd Long + Sd Height * Sd Height ) | double
|
|
| Solution Mode | Solution mode (a.k.a. Calculation Mode or Position Mode).
A integer value as outputted by the selected Positioning System.
Consult the selected system/driver description in the Drivers & Interfacing manual to see what this value means.
Notice that this value can be used/monitored using other QINSy Displays: - In a Position System Display it is called 'Solution Mode' in the Quality group
- In an Alert Display, you may define a Raw Data Alert 'Solution mode outside limit'
- In a Node QC Display, it is called 'Solution Mode' in QC Parameters
- In the Controller Computation Setup you can find it as 'Solution Mode' under the System Thresholds
| integer
|
|
| Covariance A | The Semi-Major Axis (1 Sigma, 68% Level)
The value as outputted by the selected Positioning System, or when this is not outputted, it will be derived from the standard deviations of the lat or lon:
Formula: Covariance A = Sd Lat, if Sd Lat >= Sd Lon, else Sd Lon. | double
|
|
| Covariance B | The Semi-Minor Axis (1 Sigma, 68% Level).
The value as outputted by the selected Positioning System, or when this is not outputted, it will be derived from the standard deviations of the lat or lon:
Formula: Covariance B = Sd Lon, if Sd Lat >= Sd Lon, else Sd Lat. | double
|
|
| Covariance Theta | Direction of the Semi-Major Axis (1 Sigma, 68% Level).
The value as outputted by the selected Positioning System, or when this is not outputted, it will be derived from the standard deviations of the lat or lon:
Formula: Covariance Theta = 0° (true north), if Sd Lat >= Sd Lon, else 90° (true east) | double
|
|
| Satellite Count | The number of satellites used, as outputted by the system.
Notice that not every positioning system may output the satellite count, in that case the value will be empty.
Consult the Drivers & Interfacing manual to see if this item is supported by the selected system/driver. | double
|
|
| Differential Age | The age of the differential corrections, as outputted by the system.
Notice that not every positioning system may output an age, in that case the value will be empty.
Consult the Drivers & Interfacing manual to see if this item is supported by the selected system/driver. | double
|
|