
This document outlines the steps involved in setting up a CSD operation.
Setup and Interfacing - Database Setup Program
Objects
Refer to Cutter Suction Dredger (CSD) - Object Definitions for a more detailed explanation.
There is considerable variation in how a dredger is configured in terms of sensors used and whether all or some of the sensor data is read by QINSy directly from the sensors themselves as opposed to being delivered via the PLC.
The following presents one configuration which should provide sufficient guidelines to cope with alternative setups.
It is assumed that:
-
a template database with Geodetics has been created, including a Mean Water Level Model, leaving the definition of Objects and Systems to this Quickstart.
-
Geodetics have been tested using the Geodetic Parameters utility.
-
all node offsets from the pontoon, ladder and cutter Reference Points (

By default the Reference Point (


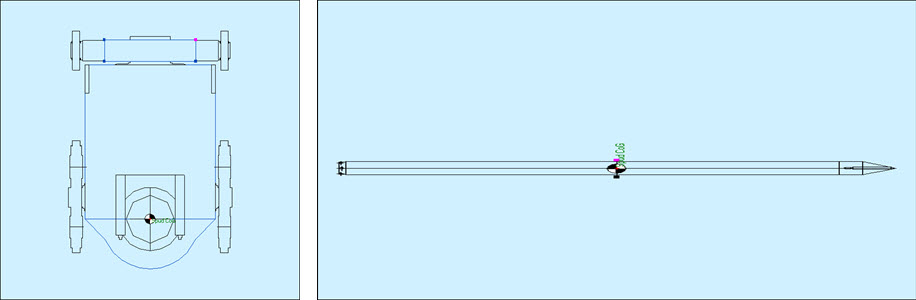
Define a dredger shape from at least a top view perspective, and a side profile perspective.
An aft view may be useful.
How detailed the object shape needs to be is a personal choice.
Remember the option to import a 3D DXF file.
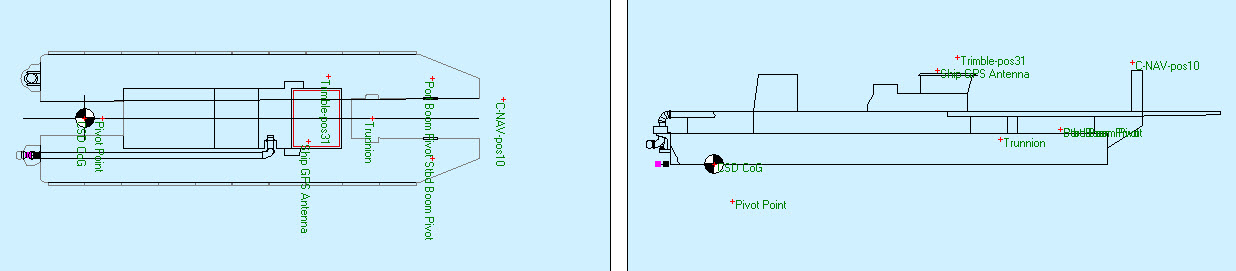

Add a variable node and enter the correct offsets for the GNSS antenna variable node from the CoG.


Choose the driver and add a variable node, entering the system offsets from the CoG.

One or more of these sensors may be directly interfaced to QINSy, or observation data may be received from the dredging PLC.






Potentially there is no pitch sensor on the ladder and the cutter head is positioned by pseudo-USBL observations received from the PLC.
In that case a USBL system must be defined on the pontoon with the correct driver type to decode the data message.
Alternatively both pitch and USBL systems may be interfaced.

-
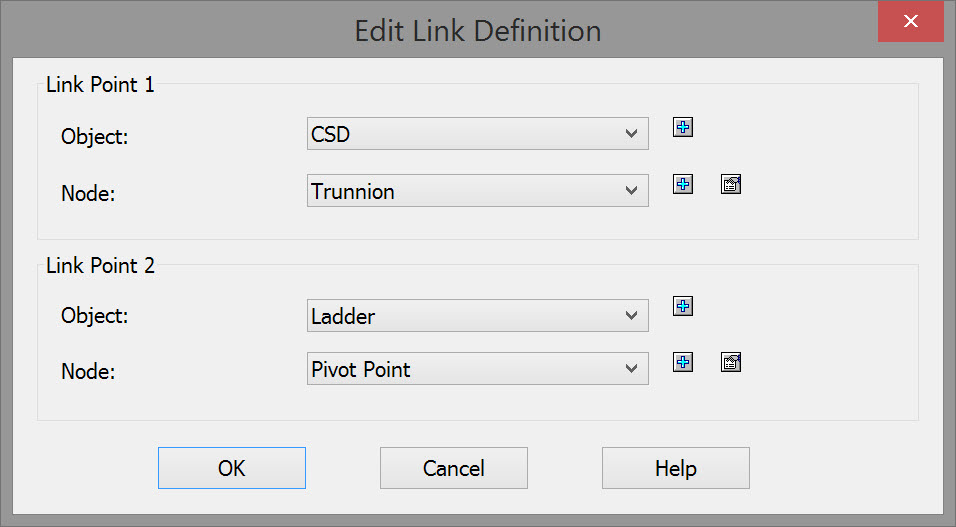
the pivot point corresponding to the trunnion node on the pontoon.
-
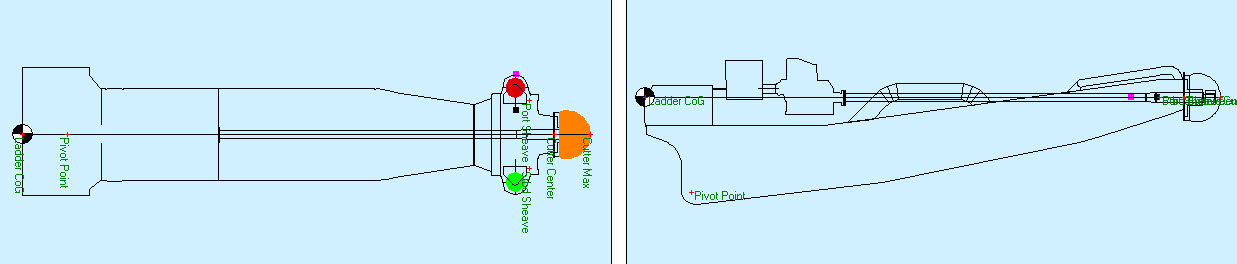
the cutter center where the cutter attaches to the ladder.
-
the tip of the cutter.
If running anchors, it may also be useful to define the port and starboard sheaves.




Therefore define a USBL system on the pontoon with the center of the spud pole as a USBL target.

For the dredge head model, enter the number of rows and columns, and the overall width and length.
Then click on 

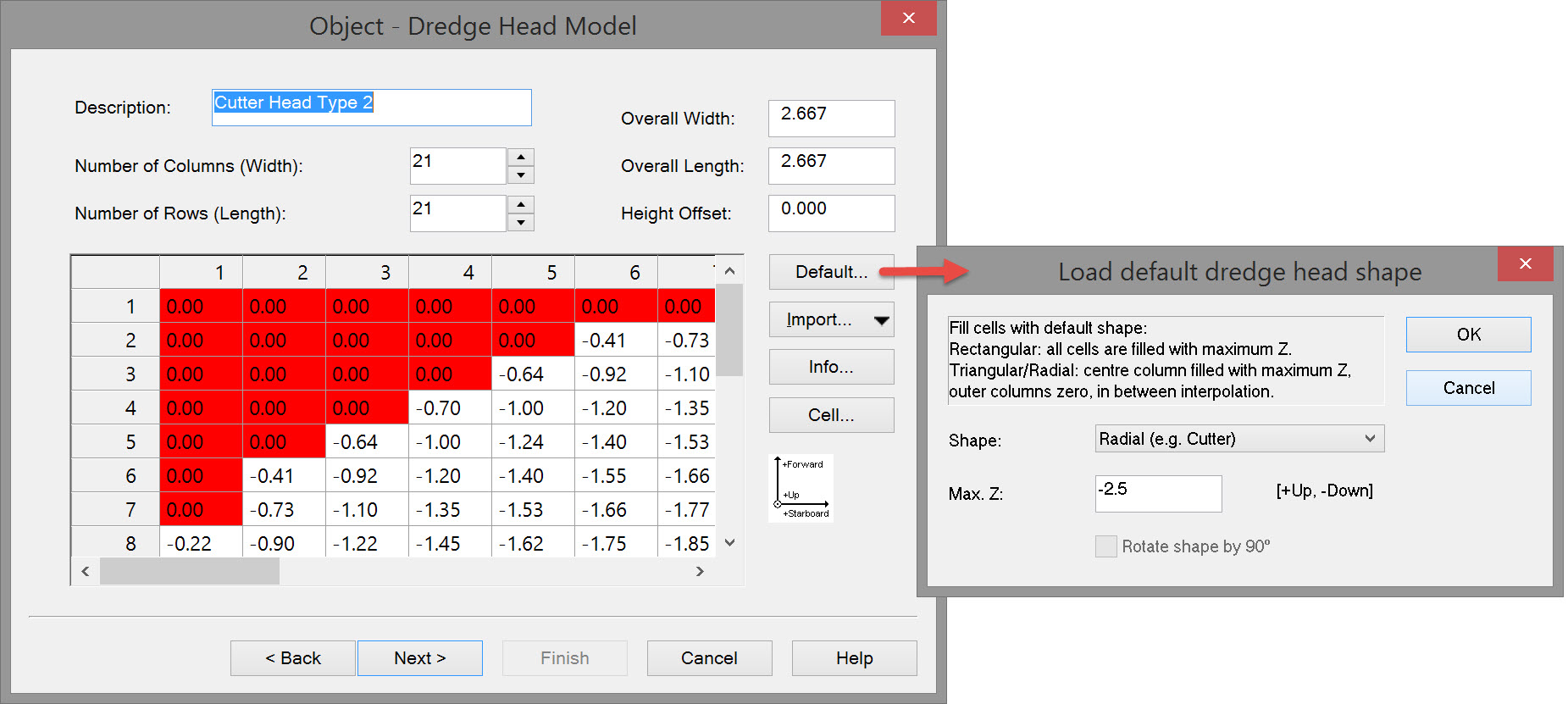
A model is created in a spreadsheet type format. Each cell in the matrix is then treated as a pseudo-echosounder which is used in updating the sounding grid during dredging operations.

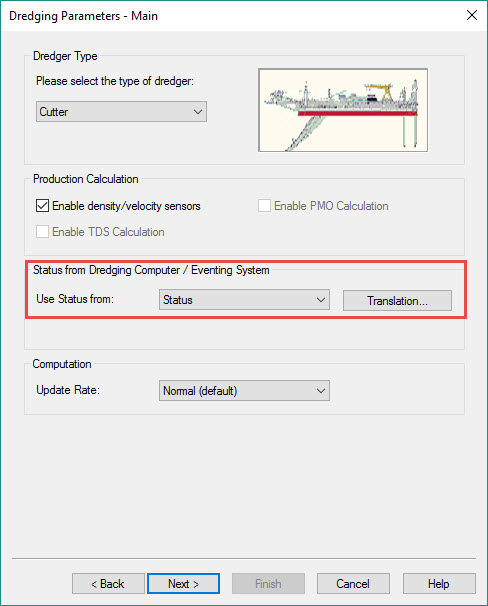
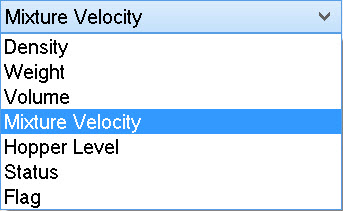
Check 
If Status is received from the PLC, select that option and establish the Translation Table to decode the correct status.



An alternative option for linking the ladder to the cutter is to define a USBL system, with manual input, on the ladder, making the cutter center node the USBL Reference Point. Use the same point as the USBL target.
Then leave dX/dYdZ values at zero.
Return to: top of page.
Anchors
If running anchors as part of the operation:
If sensors are available to enable positioning of boom arm ends:
-
Add an Object for each boom.
-
Add variable nodes for boom pivot points and end points.
-
Define the rotational angle sensors used to position the boom ends.
....or pseudo-usbl observations are available from the PLC to position them:
-
Add an Object for each boom.
-
Add variable nodes for boom end points.
-
Define a USBL system on the pontoon and decode the dX/dY/dZ values for each boom end as received from the PLC.
....or the booms always rotate out to the same fixed angle relative to the pontoon:
-
Add an Object for each boom.
-
Add variable nodes for boom pivot points and end points.
-
Define a gyro system with manual input. When online enter angles for each boom.
No anchor handling functionality is available online without this system.
A two-way dredger to anchor tug serial data communications radio is a prerequisite.
Anchor tug position and heading is received and dredger position and heading, as well as anchor drop locations, are sent.
This exchange of data is configured online in the Tug Manager dialog.
The Tug Display utility is run on the tug.
Return to: top of page.
Output Systems
Positioning, Heading and Motion
Depending on the how the hardware interfacing is configured, it may be necessary to define one or more data output systems.
For example, when positioning, gyro and motion sensor systems are interfaced directly to QINSy, sending that data to the PLC may be required.
Output systems are defined in a single page dialog box, requiring only a System Name, output System Type, Driver, and I/O Parameters for a network or a serial interface.
Generic Output (User-defined ASCII)
In cases where the dredging computer (PLC) expects to receive data in a specific format, and that format is not currently supported in your QINSy release, the Generic Output (User-defined ASCII) driver may be used.
The template database setup is simple: system name, output system type, Driver, and network or serial interfacing details.
When the Controller is started, the Generic Output icon 
Please refer to the
-
Quickstart (QS CSD - Primary Displays).
-
CSD - Generic Display found in the main Howto Dredging.
-
and the for detailed information about this utility.
Generic ASCII Data Logger (Controller)
In cases where ASCII data must be written to a log file in a specific format not currently supported in your QINSy release, the Generic ASCII Data Logger driver may be used.
The template database setup is simple: System Name, output System Type, Driver, and I/O Parameters for a network or a serial interface.
The XML file, in which the output content and format is specified, is created using the Generic Layout Editor, started from the 
Please refer to for detailed information about this utility.
IHC Dredging Triangles (TCP or UDP)
Written specifically for an IHC PLC this driver outputs a number of TIN triangles from the currently selected dredging design surface.
A request for a number of TIN triangles is made by the IHC dredging computer via a TCP/IP connection.
The driver fetches the triangles from the design model (manual, DTM/pro or Grid) and sends them to the IHC computer.
The driver selects the triangles which are located in an area around the last node position.
When a Manual design is used the driver will send two triangles that represent an area of 500x500 survey units around the node position.
When DTM/QGF/PRO file is selected the actual triangles as defined by the user in PM.NET or TerraModel are retrieved from the file.
When Grid File is used as input then the grid points are triangulated inside the driver and sent to the IHC computer.
The template database setup is simple: System Name, output System Type, Driver, and I/O Parameters for a network or a serial interface.
Return to: top of page.
Auxiliary Systems
Tide


-
a Name
-
the coordinates of the Node Position
-
the Horizontal Datum
-
Station Height
-
Instrument Height
-
and, most importantly, the Vertical Datum with any Height Level and/or Height Offset modifiers.
Time Synchronization
Perhaps not as critical in dredging operations, it may still be useful to define a system.

This is a hardware device manufactured by QPS for converting a TTL or CLS pulse to an RS232 compatible signal.

Continue to: QS CSD - Create Sounding Grid and Import Design Model
Return to: top of page.
Return to: Quickstart - CSD.