
Description
The format has been introduced with the Reson 7K Center
Driver that decodes bathymetry, sidescan, snippet, position, attitude and gyro data from a Reson Seabat 7K series Multibeam Echosounder using a TCP network connection.
This driver will also support the Seabat 8125 Hybrid and the Seabat T20-P systems.
Other multibeam systems may also be supported through the same protocol:
-
Norbit multibeam sounders (www.norbit.no) use the same protocol.
It is strongly advised to update the Seabat 7K software to the latest version: version 7 or higher.
Warning
It is advised to interface all sensors (e.g. position and motion) directly to Qinsy even though the 7k unit has the option to forward all sensor data.
|
System |
Model |
|---|---|
|
Teledyne Reson |
|
|
Norbit |
|
|
Baywei |
|
|
Teledyne Odom |
|
|
Teledyne Blueview |
|
Driver Information
|
Driver |
Reson Seabat 7K (TCP Network) |
Interface Type |
TCP/IP |
Driver Class Type |
TCP Client |
|---|---|---|---|---|---|
|
Yes |
Input / Output |
Input |
Executable |
DrvSeabat7K.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Decoding Notes
Click to expand...
Available packet types
As discussed in the Database Setup chapter, different devices will support different record types. The following table shows which records used by Qinsy are supported for each device.
|
Device |
Bathymetry |
Snippets |
Water column |
Sidescan |
||||
|---|---|---|---|---|---|---|---|---|
|
7006 (old) |
7027 (New) |
7008 (Old) |
7028 (Standard) |
7058 (Normalized) |
7018 (Standard) |
7042 (Compressed) |
7007 |
|
|
7100 |
|
|
|
|
|
|
|
|
|
7101 |
|
|
|
|
|
|
|
|
|
7111 |
|
|
|
|
|
|
|
|
|
7125 |
|
|
|
|
|
|
|
|
|
7128 |
|
|
|
|
|
|
|
|
|
7130 |
|
|
|
|
|
|
|
|
|
7131 |
|
|
|
|
|
|
|
|
|
7150 |
|
|
|
|
|
|
|
|
|
7160 |
|
|
|
|
|
|
|
|
|
8125H |
|
|
|
|
|
|
|
|
|
T20 |
|
|
|
|
|
|
|
|
|
T50 |
|
|
|
|
|
|
|
|
|
Blueview |
|
|
|
|
|
|
|
|
|
Norbit |
|
|
|
|
|
|
|
|
|
Odom MB2 |
|
|
|
|
|
|
|
|
MBES
Time Tag
The time tag from the 7000 record's RECORD_FRAME is used as the ping observation time.
Therefore it is crucial for proper operation that both the Seabat 7K unit and Qinsy are UTC synchronized (previously PPS).
Brightness and Colinearity
Brightness and Colinearity flags are decoded and used by Qinsy.
|
Per Beam the System reports 4 quality flags: |
|||
|
Bit |
Description |
1 = |
0 = |
|---|---|---|---|
|
0 |
Brightness |
1 = pass |
0 = fail |
|
1 |
Colinearity |
1 = pass |
0 = fail |
|
2 |
Bottom Detect Process (Magnitude) |
1 = used |
0 = not used |
|
3 |
Bottom Detect Process (Phase) |
1 = used |
0 = not used |
This translates into the following Quality indicators:
|
Binary figures |
As shown in Qinsy |
BDP - Phase |
BDP - Magnitude |
Colinearity |
Brightness |
|---|---|---|---|---|---|
|
0000 |
0 |
|
|
|
|
|
0001 |
1 |
|
|
|
|
|
0010 |
2 |
|
|
|
|
|
0011 |
3 |
|
|
|
|
|
0100 |
4 |
|
|
|
|
|
0101 |
5 |
|
|
|
|
|
0110 |
6 |
|
|
|
|
|
0111 |
7 |
|
|
|
|
|
1000 |
8 |
|
|
|
|
|
1001 |
9 |
|
|
|
|
|
1010 |
10 |
|
|
|
|
|
1011 |
11 |
|
|
|
|
|
1100 |
12 |
|
|
|
|
|
1101 |
13 |
|
|
|
|
|
1110 |
14 |
|
|
|
|
|
1111 |
15 |
|
|
|
|
The driver will automatically use the 7027 message from the Seabat 7K when available.
This 7027 record contains the raw steered angles and travel times per beam.
When the 7027 message is not available (7K software Version < 7) then the driver will use the 7004 + 7006 messages.
Extra detection
The extra detections are stored in the Qinsy database, however there is no distinction between normal and extra detections and therefore they not stored in the *.qpd files
7027 message
The 7027 message doesn't contain a per-beam intensity for FP1/2/3 firmware. If this is detected the intensity is still decoded from the 7006 message.
The FP4 7027 message does contain intensity values and also supports multiple detections per beam.
Furthermore the 7027 contains a varying number of detections per ping, therefore the driver will (as of 24 Jan 2012) decode the number of beams from the 7006 message which is fixed to the maximum beam count, and leave the beams that were not reported by the 7027 message to invalid/0.
This was done to prevent any issues with GSF Export and Fledermaus usage that do not cope well with a varying number of detections per ping.
Reson FP4 Multi Detect Support
Note on Reson Seabat 7K FP4: Since version FP4 the Seabat can detect multiple detections (footprints) per beam.
Currently these are ALL decoded and used by Qinsy.
Teledyne Odom
Teledyne Odom MB2 Technical Note
Teledyne Odom has released a Technical Note on Increasing Network Adaptor Receive Buffer.
To prevent packet drops and poor performance the network adapter receive buffer (input buffer) must be increased to at least 512.
Read the technical note for further details.
Norbit
Interfacing Norbit with Qinsy
Norbit User Manual (TN-140075-4.1.0_WBMS-User_Manual.pdf) contains detailed information regarding Qinsy software configuration with the Norbit system.
See Appendix G&H.
When the system has a Applanix unit integrated, please double check in PosView if the 104 message is enabled.
The 104 message needs to be enabled to report position SD's (of Sensor 1) to Qinsy.
Rotator
It is possible to use a Norbit in combination with a Rotator.
When the Rotator is turning, no data will be outputted from the Multibeam.
Side Scan
The side scan data is always decoded from the 7007 message.
The Seabat 7K Center software acts as a server, the Qinsy driver acts as a client. The driver will automatically connect to the Seabat 7K Center.
The driver will negotiate the required records automatically when connecting, for example it will always ask for record 7000. Different data types will be requested depending on the Raw Storage Settings (see Driver Specific Settings below) and configured system types.
The driver will start decoding data after the negotiation phase was successful. Note that thus it is not necessary to set any outputs within the Reson software.
The Reson 7K Software doesn't require any specific connection setup anymore, any previous UDP broadcasts can be removed in the user interface of the 7K software.
Info
Various packet types can be exported to XTF.
It is important to select the correct Raw Data Recording options in Database Setup before starting the survey!
Snippet window limitation option can now also be set in Database Setup - Driver Specific Settings.
Database Setup - Reson
Click to expand...
Bathymetry / Snippets / Water Column
-
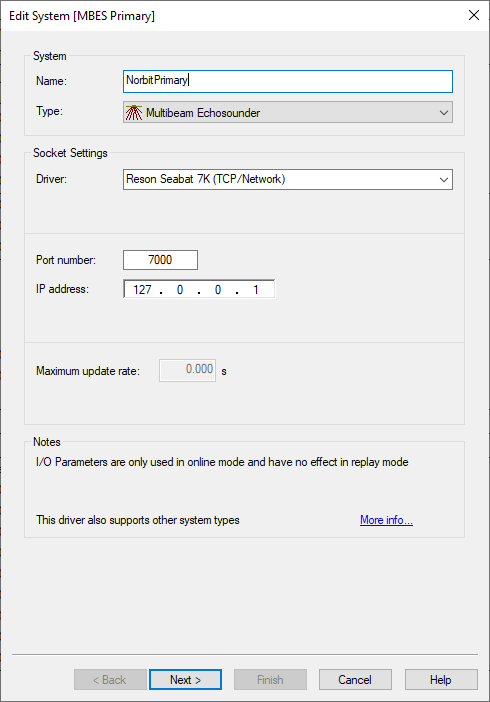
Add a new "Multibeam Echosounder" system to the object in your template database.
-
Select driver "Reson Seabat 7K (TCP/Network)" unless an Integrated Dual Head (IDH) system is used.
In that case the port head should use the "Reson Seabat 7K (TCP/Network)" driver and
the starboard head should use the "Reson Seabat 7K Head II (TCP/Network)" driver. -
The port number should always be 7000, even if dual head systems are interfaced.
-
The IP address should be the IP address of the Seabat 7K System.
For dual head systems different IP numbers are required unless an Integrated Dual Head (IDH) system is used.
In that case the same IP address should be used for both heads. Examples of these are the IDH T50-R and T20-R systems.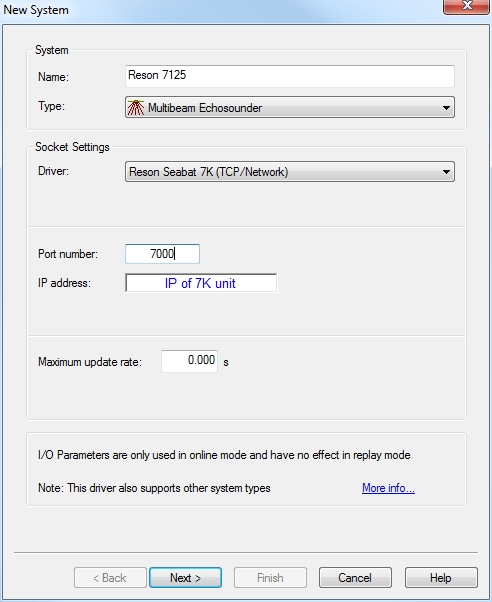
-
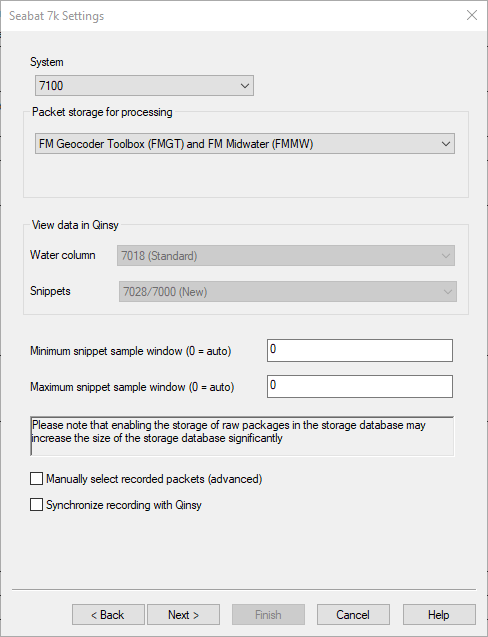
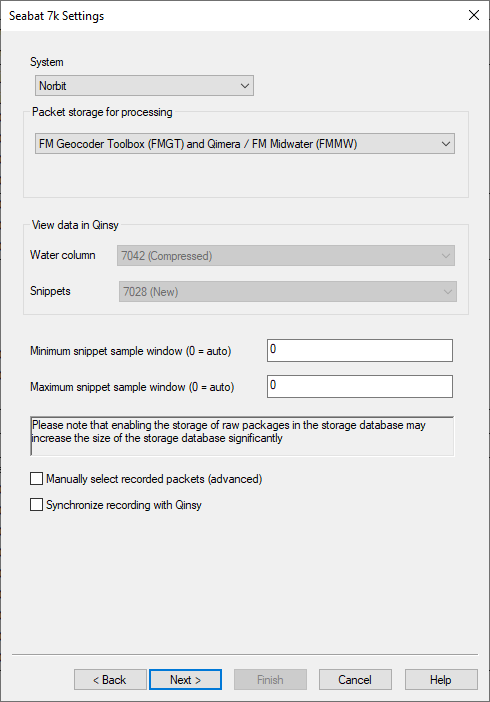
On the Seabat 7k Settings page we can select which raw packets are stored in the database:
-
System
Select the system you are using with this driver. -
Packet storage for processing
Here you can select which processing tool (if any) you want to use. When a specific processing tool is selected, the raw packets required by that tool are automatically stored in the database.
Only the processing tools which are supported by the device you are using are shown.
Supported processing tools include:-
FMGT - FlederMaus Geocoder Toolbox
-
FMMW - FlederMaus Mid Water
-
XTF - Processing tools that can handle eXchange Triton Format import (CARIS / PDS / etc.)
-
Grayed out
When FMGT is selected the snippets will be grayed out because the format is automatically selected.
This also applies to FMMW (water column).
-
View data in Qinsy
Here you can select if you want to view water column or snippet data in Qinsy. Some devices support multiple types of data (for instance 'normal' water column and compressed water column).
If this is the case, you can select which one you want to view here.
If you have selected a processing tool in the previous step, some options may be disabled as a specific data packet is required by that processing tool.
It is not possible to record multiple packets of the same data type (e.g when both 'normal' water column and compressed water column data are supported by the unit, only one can be recorded). -
Snippet sample window size
It is strongly advised to use the auto setting (0), then the Sonar will intelligently determine the optimal number of samples, balancing image quality and size. -
Synchronize recording with Qinsy
If this checkbox is ticked, recording will be synchronized between Qinsy and the multibeam manufacturer's software.
The file name of the S7k file will match the name of the database file used in Qinsy.
Qinsy is only able to communicate that recording should start/stop plus the desired name of the recording file.
Please make sure to manually set up all other recording parameters in the manufacturer's software (for example, which packets are included in the recording) prior to using this feature.
Not all systems supported by this driver may support this feature.
Norbit systems, for example, do not currently support external starting/stopping of recording.
-
If these presets of settings do not suit your needs, there is a possibility to manually select which raw packets should be stored in the database.
In order to do this, tick the 'Manually select recorded packets (advanced)' check box.
The dialog will change to allow you to manually choose which packets are stored for bathymetry, water column and snippets:
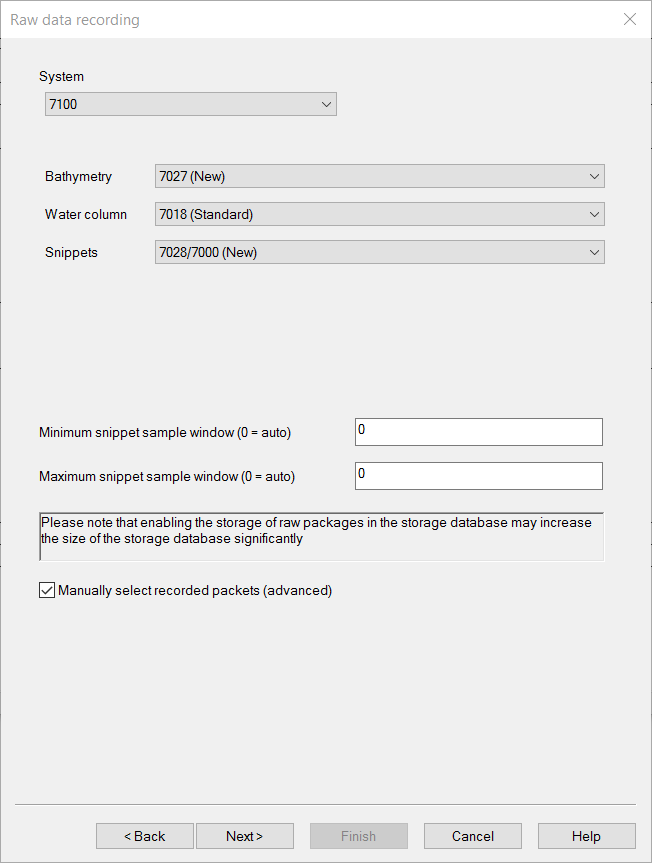
Only the record types supported by the chosen device will be available for selection.
The following options may be available:
|
Setting |
Option (bold=default) |
Description |
FMGT |
Qimera /FMMW |
XTF |
|---|---|---|---|---|---|
|
Raw Bathymetry Storage* |
None |
No Additional Raw packets are stored. The bathymetry is still decoded, but only the necessary information for Qinsy is decoded and stored in the recorded database file. |
|
|
|
|
7000/7027 (New) |
Stores the 7000 and 7027 in separate packets in the database for XTF Export usage and Fledermaus. |
|
|
|
|
|
7006/7004/7000 (Old) |
Stores the legacy 7006/7004 concatenated message for XTF Export usage and to support bringing data from older sonars into Qimera, FMGT, and FMMW. Note: This option does not affect the decoding for Qinsy, which will always use the 7027 message if it is available. |
|
|
|
|
|
Raw Snippet Storage |
None |
No Raw Snippet packets are stored. |
|
|
|
|
7058 (Normalized) |
Stores the 7058 message in the database. These can be viewed in Qinsy and can be processed in FMGT since version 7.7.0 . |
|
|
|
|
|
7028 (New) |
Stores 7028 message in the database. Both for XTF Export and Fledermaus. |
|
|
|
|
|
7008/7004/7000 (Old) |
Store the legacy 7008/7004 concatenated message for XTF Export. |
|
|
|
|
|
Water Column Usage |
None |
No Water column data is decoded and stored by the driver. |
|
|
|
|
7042 (Compressed) |
Stores the 7042 message in the database. These can be viewed in Qinsy and can be processed in FMMW since version 7.7.0 . |
|
|
|
|
|
7018 |
When the 7018 Option is chosen the Water Column Data can be shown in Qinsy and stored in the database for further processing in Fledermaus. |
|
|
|
Please note that prior to Qinsy 9.3 the 7000 record was not stored when 7006/7004 was selected for raw bathymetry. This may lead to a confusing situation:
-
Where the data was recorded in Qinsy 9.2.3 or older:
-
The client has selected '7006/7004' for raw bathy storage (note that in the older versions it was named 7006/7004, not 7006/7004/7000 because we would not store the 7000 records)
-
The 7006 and 7004 records are stored in the database. The 7000 record is not.
-
-
And this is then brought into Qinsy 9.3.0 or newer:
-
If we open the recorded database in Database Setup the raw bathy storage will now read '7006/7004/7000' which suggests that the 7000 record should be in the database.
-
Takeaway: If you are ever in a situation where you're looking at client data that you believe should contain 7000 records but does not, verify that it was recorded in Qinsy 9.3.0 or newer.
If you're stuck, feel free to reach out to me (Bouke) directly.
-
see Format Description for more information!
Warning: Storing Water Column Imagery
Please note that because of the possible size of water column packets, an additional step is needed to actually store the raw packets in the database.
Selecting a water column package in Database Setup will make it available for online viewing, but to actually store the raw packets in the database you will need to change the following setting in the Controller when online:
Session Setup >> Storage >> Database >> 'Store MBE Water Column Imagery'
Note: Roll/Pitch/Heave stabilization
Roll/Pitch/Heave stabilization options can not be set in Database Setup.
This is not necessary since the new 7027 Bathymetry message will report the actual steered beam angles (relative angles to the sonar Rx surface) to Qinsy.
Qinsy can correct these relative angles by applying the reported MRU attitude angles. This results in absolute beam angles.
-
Enter the location of the Multibeam on the object (Vessel / ROV / AUV):
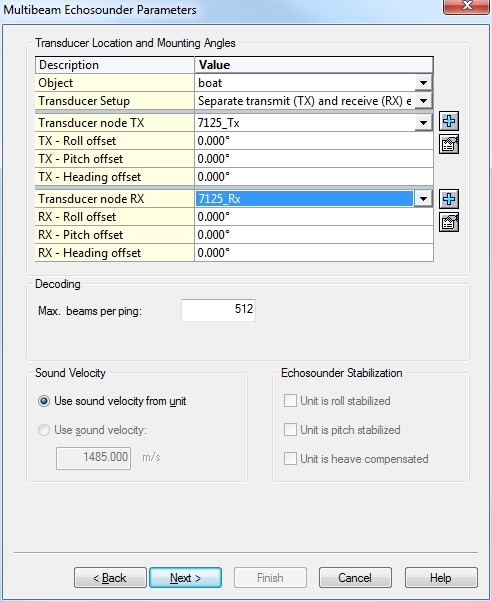
Separate Transmit and Receiver transducer node offsets
For optimum calculation results we strongly advise to enter separate Transmit and Receiver transducer node offsets. This is also true for circular array transducers like the Seabat 7101 uses.
Refer to the operation manual for the details on the acoustic centers of the transducers.
The only case where it is not advisable to use separate Transmit and Receiver transducer node offsets is when the 7027 bathymetry datagram is not available or desired and the older datagrams (7004/7006) are used.
In this scenario, the driver should be set up to use a common acoustic center since the older datagrams report travel times and angles that are corrected by Reson for the separation between the transmitter and receiver.
The node location of the common acoustic center should be that of the reference point specified in the Reson Operator's manual.
-
Enter the 'Max. beams per ping' applicable for the system.
Since Qinsy 9.2.0, 1024 beams are supported -
On the next page, Echosounder Accuracy Parameters, you can enter the parameter used for the TPU calculation.
The results of the TPU calculations are used for IHO filtering, CUBE, etc. -
On the Next page, Multibeam Echosounder Corrections, you could select sensors that would be used for adjustable alignments of the multibeam installation.
Some vessels can rotate the multibeam for quay wall / jetty / breakwater inspections. -
When finishing the setup wizard you will be prompted by a dialog that will offer you the option to install other systems that use the same driver executable:
When you click on OK, a new wizard will be started to set up the related Sidescan Sonar system.
Sidescan
Note
Please note that sidescan data is not available for Odom MB2 and Blueview systems.
If the backscatter data is to be visualized then:
-
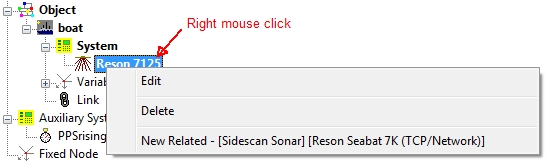
If you cancelled the prompted additional driver wizard mentioned above you have two options:
-
Right click with your mouse on the MBES system you have set up and select the related Sidescan Sonar driver:
-
Driver type, Driver, Port number and IP are already selected for you and correspond with the related MBES driver
-
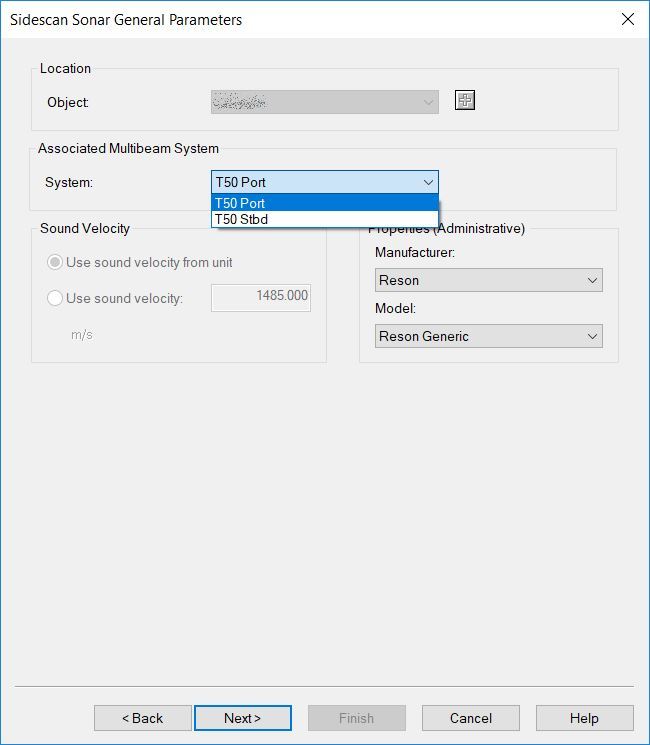
In case you have a dual head system (i.e. SeaBat IDH T20/50-R) you need to:
-
Manually add a second Sidescan system to decode the sidescan data from the second head (see point b. below)
-
Select the associated Multibeam System (head) (see point 2 below).
-
-
-
Manually add a Side Scan Sonar (SSS) system
-
Select driver "Reson Seabat 7K (TCP/Network)",
-
The port number should always be 7000, Enter the IP address of the Seabat 7K System.
-
-
-
Select the same object as you have selected for the related MBES driver and select the associated MBES system:
-
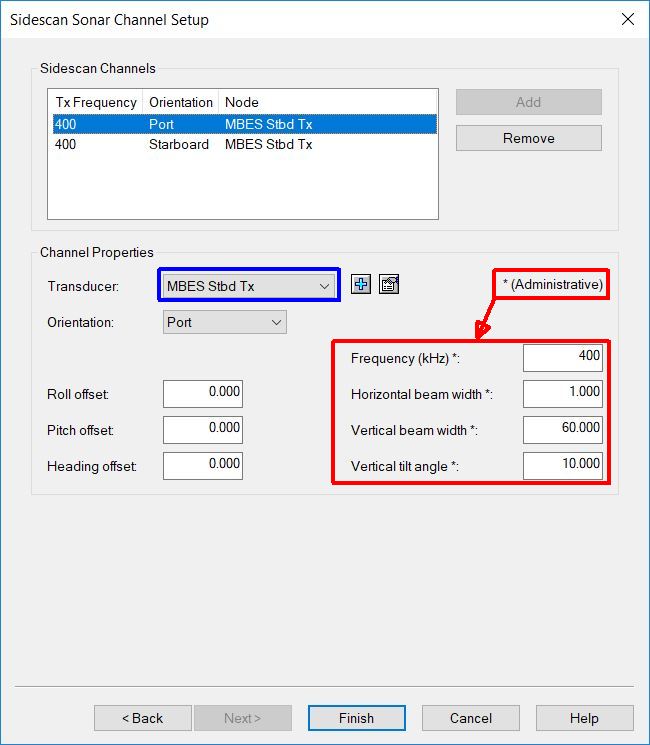
Add a Port side and Starboard channel. (Read more about SSS systems in 'How-to Sidescan Sonar' in the Qinsy Knowledge Base).
(Associated system: T50 Stbd)
Time Synchronization System
-
When Qinsy software is running on the same PC as the Reson 7K software (e.g. for 8125 Hybrid system) and the latter is synchronizing the MSWindows clock, it is possible to select a special Time Synchronization driver that will use only the Windows system time and not synchronize it.
Select driver "Third party synchronized Windows system time". -
When Qinsy is running on a separate PC then don't use the driver mentioned above, but use a Time Synchronization driver that does synchronize the PC clock.
-
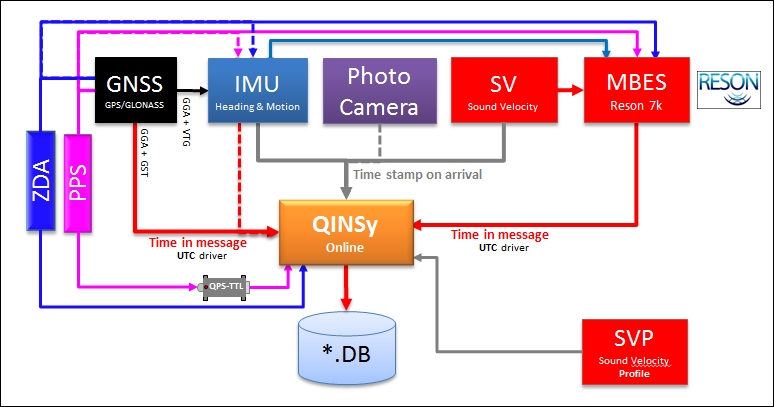
When all time critical systems are interfaced with Time Synchronization and Time message (ZDA / UTC / RMC) one does not need a QPS-TTL Time Synchronization adapter.
-
The use of the QPS-TTL Time Synchronization adapter will make identifying timing errors easier.
-
Read more about timing in Qinsy in the Drivers Manual and the Qinsy Knowledge Base:
-
Drivers Manual:
-
Time Synchronization Drivers
-
-
Knowledge Base:
-
How-to Timing in Qinsy
-
How-to Time Synchronization Display
-
Reson Remote IO (RRIO)
RRIO is a protocol used for distribution of raw data messages. The RRIO is used by the RESON SeaBat 7K, the RESON T-series and the Odom MB2 sonar system.
With the RRIO it is possible to receive the device data as interfaced to the RESON SeaBat or Odom MB2 RTA by Qinsy.
RRIO can be used as an alternative to the S7K driver for position, attitude and gyro.
There are a couple of drivers where there is the option to set another system which the data is acquired by.
For instance the NMEA Position and Heading driver shown below:
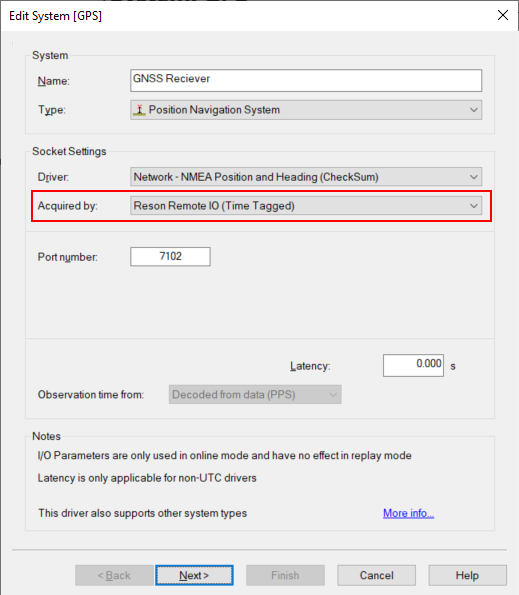
Interfacing Example
Database Setup - Norbit
Click to expand...
Bathymetry / Snippets / Water Column
-
Add a new "Multibeam Echosounder" system to the object in your template database
-
Select driver "Reson Seabat 7K (TCP/Network)" unless you use a Dual Head Norbit system.
In that case use the same driver for both heads-
Port Head "Reson Seabat 7K (TCP/Network)"
-
Port 7000
-
-
Starboard head "Reson Seabat 7K (TCP/Network)"
-
Port 7001 (port+1)
-
-
-
The IP address should be the IP address of the Norbit system.
-
Used IP address should be the computer that is running the WBMS Software, leave at 127.0.0.1 if running on the same machine.
-
On the Seabat 7k Settings page we can select which raw packets are stored in the database:
-
System
Select the system you are using with this driver. -
Packet storage for processing
Here you can select which processing tool (if any) you want to use. When a specific processing tool is selected, the raw packets required by that tool are automatically stored in the database.
Only the processing tools which are supported by the device you are using are shown.
Supported processing tools include:-
FMGT - FlederMaus Geocoder Toolbox
-
FMMW - FlederMaus Mid Water
-
XTF - Processing tools that can handle eXchange Triton Format import (CARIS / PDS / ect.)
-
-
Norbit info
-
For all other related information, please refer to the Reson 7k section.
-
Delayed/True Heave data is not part of the S7K output. For more information on how to record Delayed/True Heave data along with a POS MV, please see following pages:
Database Setup - Rotator
Click to expand...
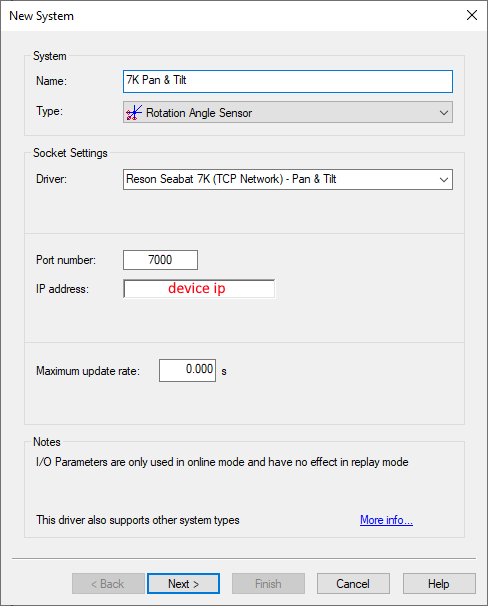
Pan and Tilt
Adding the driver
-
Add a new Rotation Angle Sensor system to the object in your template database.
-
Select driver Reson Seabat 7K (TCP Network) - Pan & Tilt
-
Fill in the device's port and IP address
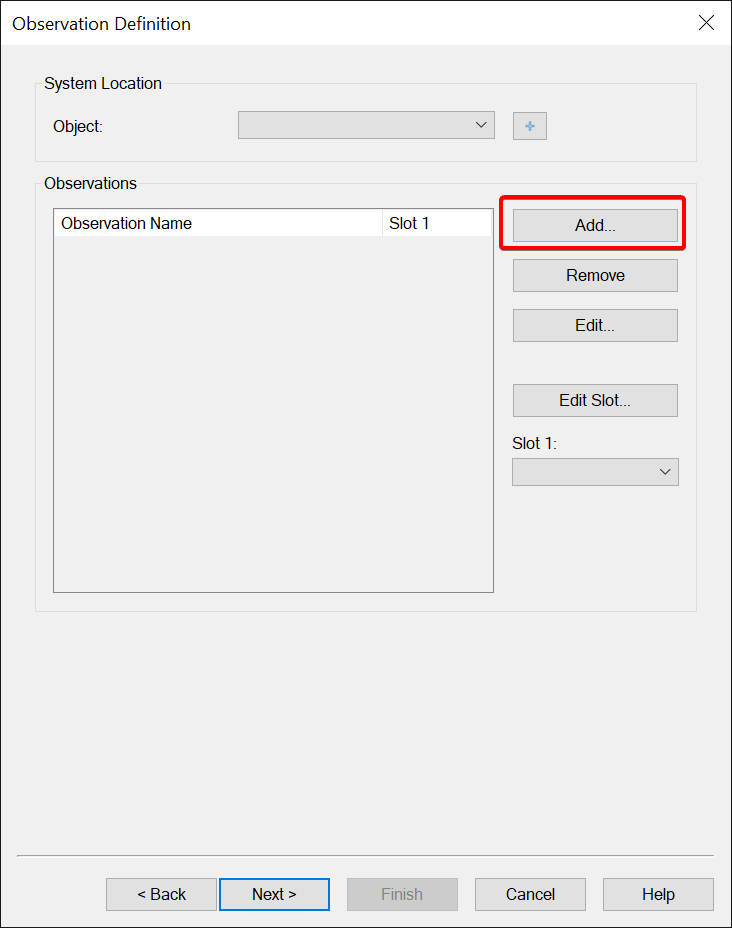
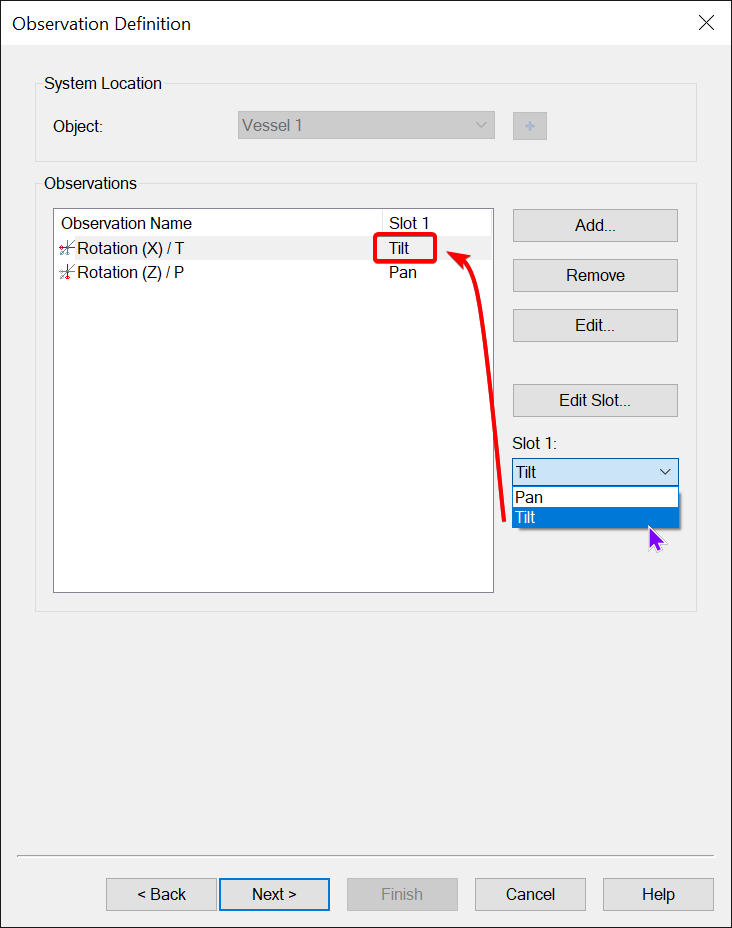
Setting up the the observations
This driver decodes both the Pan and Tilt which correspond to the following rotations in Qinsy:
|
System rotation |
Qinsy rotation |
Slot value |
|---|---|---|
|
Pan |
Z |
Pan |
|
Tilt |
X |
Til |
-
Add an observation
-
Define the observation
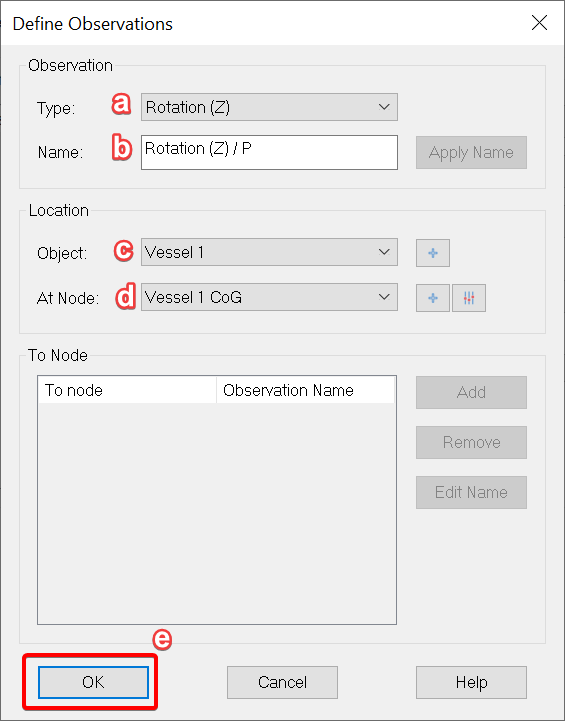
-
Select the type of observation;
-
Define a name for this observation;
-
Select to which vessel object this observation is relevant;
-
Select at which node this observation is observed;
-
Confirm your settings and press OK.
-
-
Assign the appropriate slots to the observations
Online
Click to expand...
Tip
In the Knowledge Base you can find the document 'How-to Create XTF'.
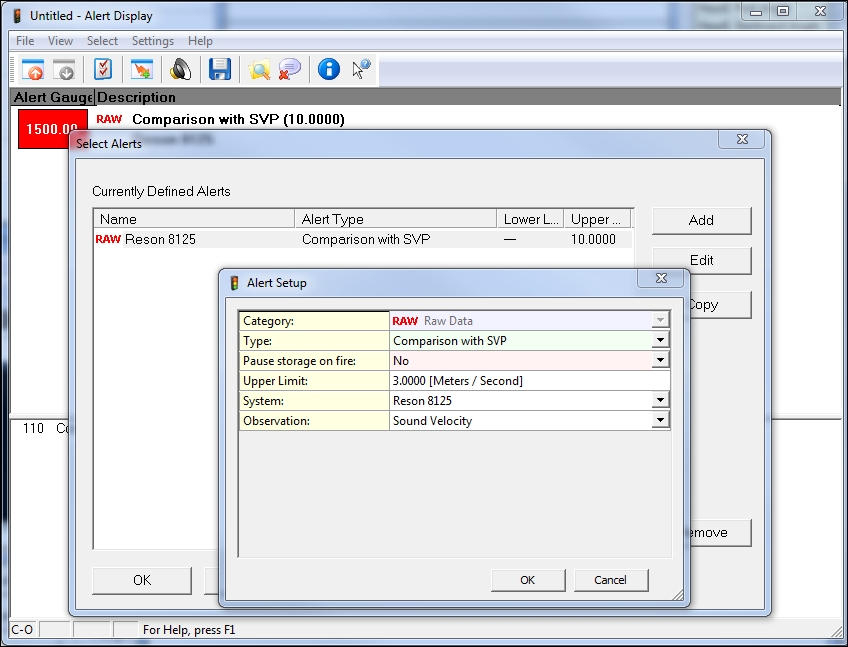
Sound Velocity
It is advised to check the reported Sound Velocity (SV) by the MBES against the Sound Velocity Profile (SVP) used during acquisition.
The reported SV by the MBES cannot be altered afterwards or during Replay.
An alert can be set to compare the SV against the SVP:
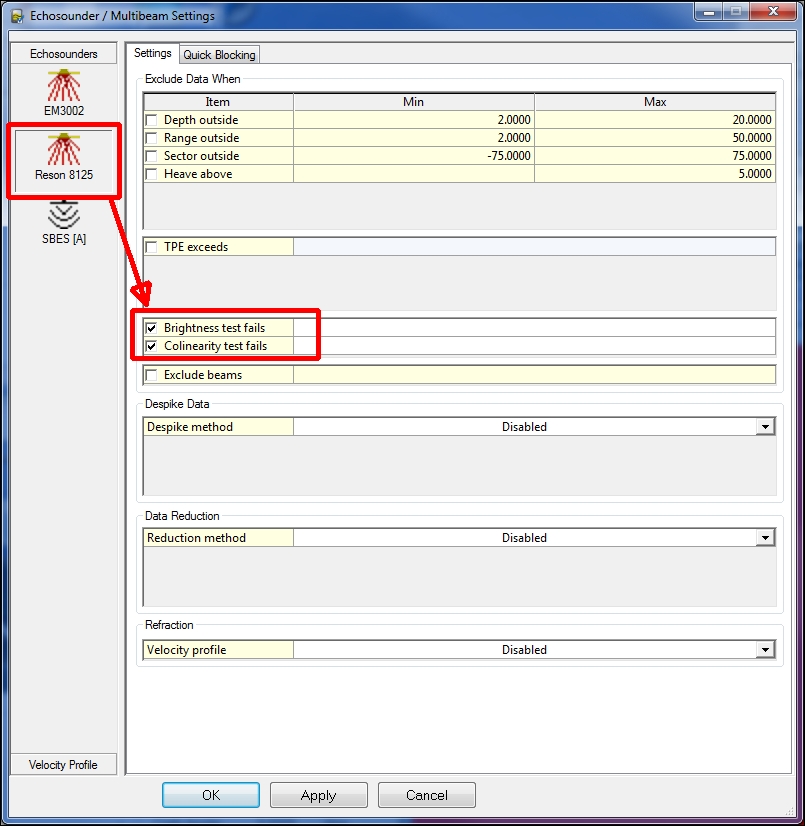
Filtering
Online and Replay offer the user the possibility to filter the data for the Reson Brightness en Colinearity tests.
Info: Supersedes DrvSeabat7KUDP.exe driver
This driver supersedes the older DrvSeabat7KUDP.exe driver Reson Seabat 7K (UDP Network) - 20.
Timing - General
Click to expand...
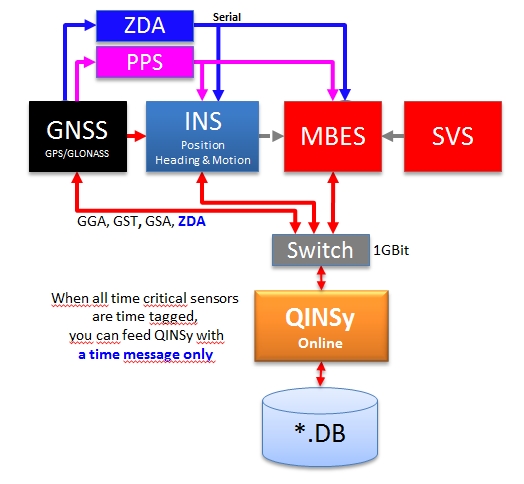
Depending on your setup, you can either interface a timestamp or a timestamp + PPS with Qinsy.
For the 7K format, you can do this using the following driver:
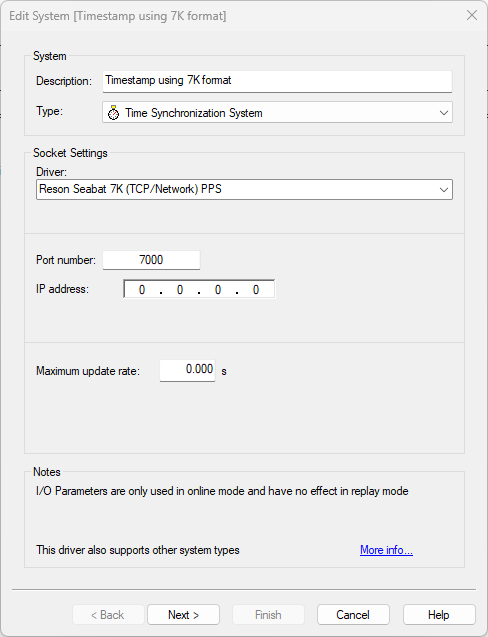
In case all your time critical sensors are time-stamping their own outputted messages accurately already, there is no need to interface PPS with Qinsy.
If you do have a system for which you need Qinsy to accurately timestamp it upon arrival on the port, then you do need to interface PPS with Qinsy.
-
For more info: Help UTC Driver
In the example where you don’t need PPS to be interfaced to Qinsy, you can run into the following, which might seem confusing.
If you go Online with Qinsy, the Time Synchronization display opens, which shows you that your timing is not very accurate:
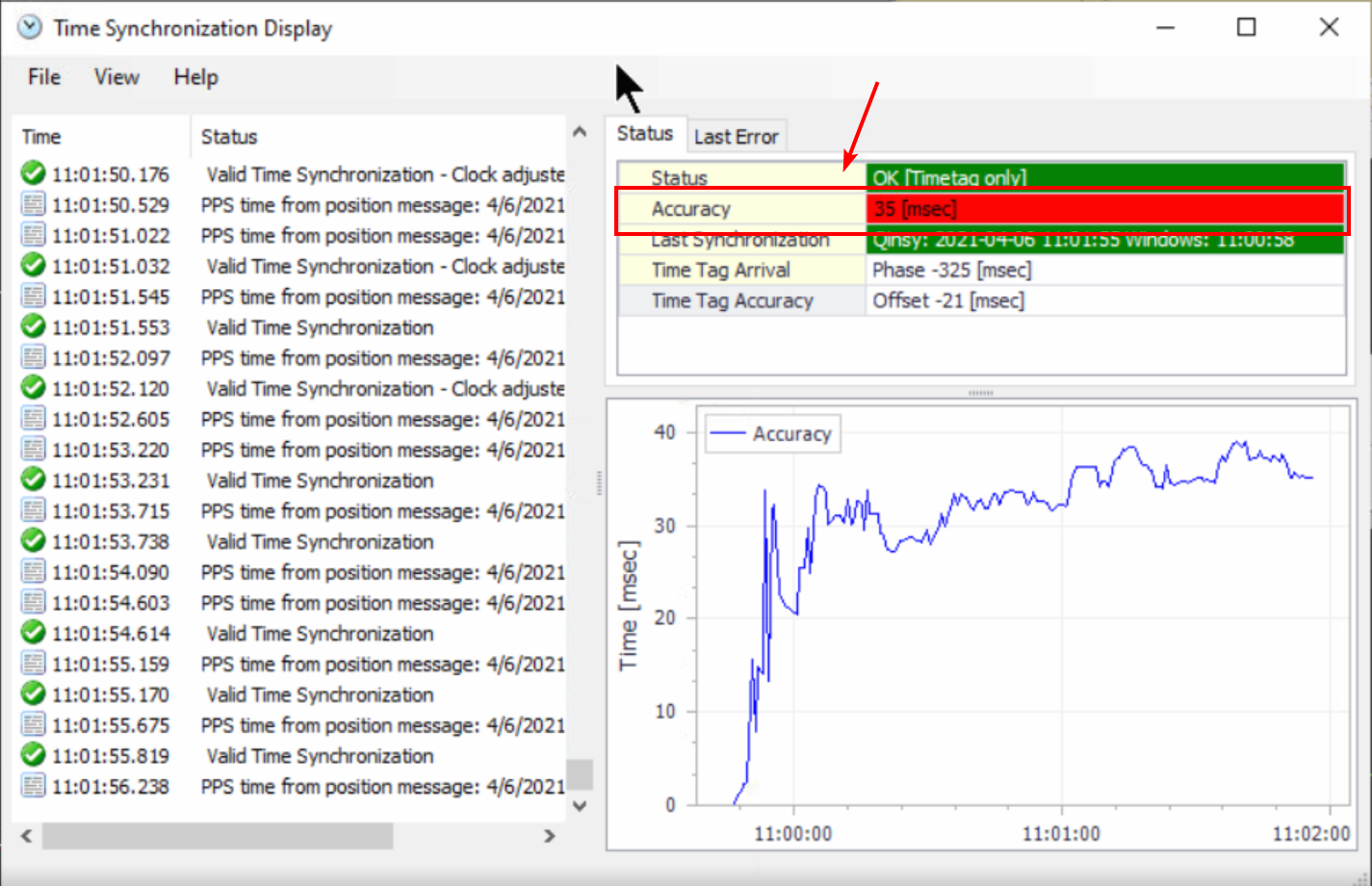
This is not a problem in this case. The accuracy might not be good, but since Qinsy uses the timestamps of the messages (from a Multibeam, motion sensor, etc.) this does not need to be very accurate.
This Accuracy is only important if Qinsy needs to timestamp messages upon arrival. In most modern systems it is already possible to interface a timestamp+PPS, so then the system already does it, and there is no need for Qinsy to timestamp it.