
Description
Driver to be used to decode roll-pitch-heave and/or heading observations from a Seapath (or MRU) motion reference unit outputting NMEA $PSXN ASCII messages.
-
Driver will automatically detect the Message Id inside the NMEA message.
-
The following Message Ids are supported: 10, 11 and 23:
-
Legacy NMEA messages $PSXN,10 and $PSXN,11 are limited to roll-pitch-heave only, there is no heading inside the message.
-
Message NMEA $PSXN,23 supports roll-pitch-heave and heading observations.
-
-
There are three versions of this driver, a serial one, a network UDP and a network TCP version. Decoding is the same for all.
-
When your motion reference unit outputs the so-called Sounder Sentence format (also ASCII), please use the driver as found in the related pages
Driver Information
|
Driver |
Seapath MRU NMEA ($PSXN) |
Interface Type |
Serial / UDP / TCP |
Driver Class Type |
Terminated <LF> |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
DrvQPSTerminated.exe
|
|
|
Related Systems |
|
||||
|
Related Pages |
Seapath MRU Sounder Sentence - 03 |
||||
-
There is no quality information in the NMEA message about the observations, except for the message id indicating 10 (data stable) or 11 (data unstable). The message id is stored as quality indicator, which can be monitored using an Observation Physics Display.
-
A possible time stamp inside the legacy NMEA message is not decoded, so timing of the observation will be at time-of-arrival.
-
The driver will automatically convert the decoded values to the default Qinsy convention and unit.
Database Setup
-
In order to decode the heading, add to your template setup a Gyro Compass system and select driver
"Seapath MRU NMEA ($PSXN)" or "Network (UDP/TCP) - Seapath MRU NMEA ($PSXN)" for the network variant.
Notice that a heading observation is only available when receiving NMEA $PSXN,23 messages.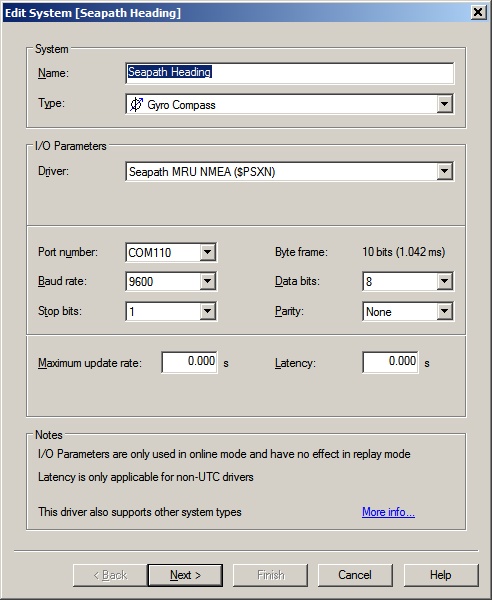
Fill in the correct I/O parameters and press Next to go to the next wizard page.
-
In order to decode the motion, add to your template setup a Pitch Roll Heave Sensor system and select driver
"Seapath MRU NMEA ($PSXN)" or "Network (UDP/TCP) - Seapath MRU NMEA ($PSXN)" for the network variant.
Fill in the correct I/O parameters and press Next to go to the next wizard page.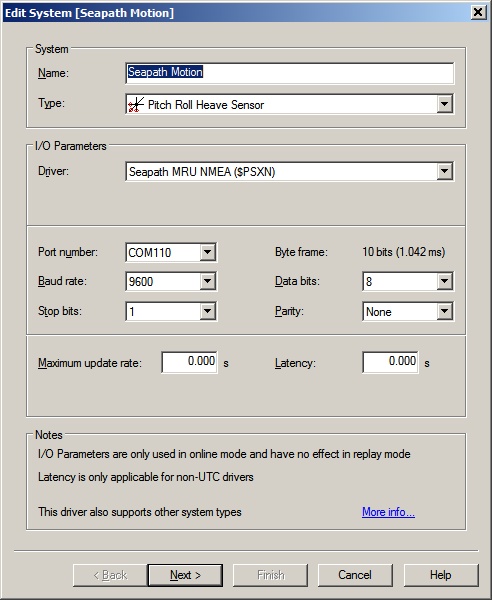
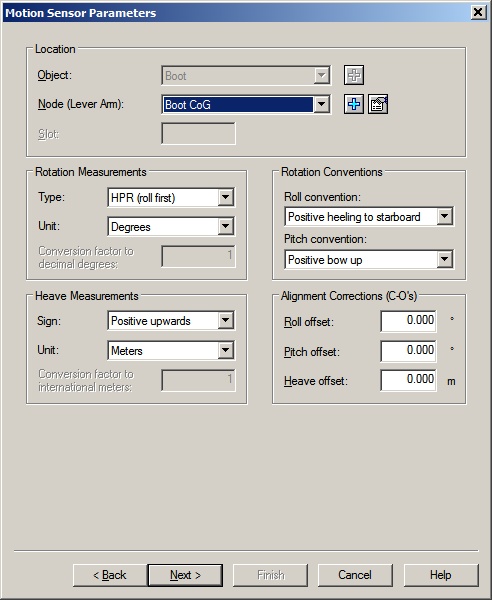
Leave the settings at the defaults on the Motion Sensor Parameters page:
Unit: Degrees, Roll convention: Positive heeling to starboard, Pitch convention: Positive bow up and Heave Sign: Positive upwards.
The driver automatically converts the decoded values to these conventions.