
Description
The Kongsberg RADius is used in Qinsy as a Surface Navigation System and/or ARPA Target System. The system consists of an interrogator (usually placed on a vessel) and at least one transponder (usually in a fixed location). The interrogator sends a signal to the transponder, which reflects it, so that the interrogator can calculate a range and a relative bearing. Qinsy can use this data to calculate a position. Having more transponders available increases the accuracy of the positioning.

Driver Information
|
Driver |
Kongsberg RADius (PSXRAD message) |
Interface Type |
Serial / UDP |
Driver Class Type |
Terminated |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
DrvQPSTerminated.exe RADIUS
|
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Decoding Notes
The following observations are available in Qinsy for this driver:
-
Surface Navigation System
-
Range
-
Angle
-
Vertical Angle
-
-
Miscellaneous System
-
Generic
-
The generic observation contains the Signal to Noise Ratio and the status number in its quality indicator field.
-
-
|
Status number |
Description |
|---|---|
|
9 |
OK |
|
-1 |
No reply from transponder. |
|
-2 |
An unknown internal error has occured: do not use observation. |
|
-3 |
Range only (no bearing could be calculated). |
If the status number is 9 (the normal situation), the other observations for that interrogator - transponder combination contain the accuracy estimate (SD) in their quality indicator fields, as can be seen in the Observation Physics display.
If an error has occurred, this error number is copied to all other observations from that interrogator - transponder combination. Qinsy will reject any observation with a negative quality indicator.
-
ARPA System
-
Targets: All targets as tracked by the system are decoded and available in i.e. the Observation Physics and Navigation displays.
-
Database Setup
Surface Navigation System
-
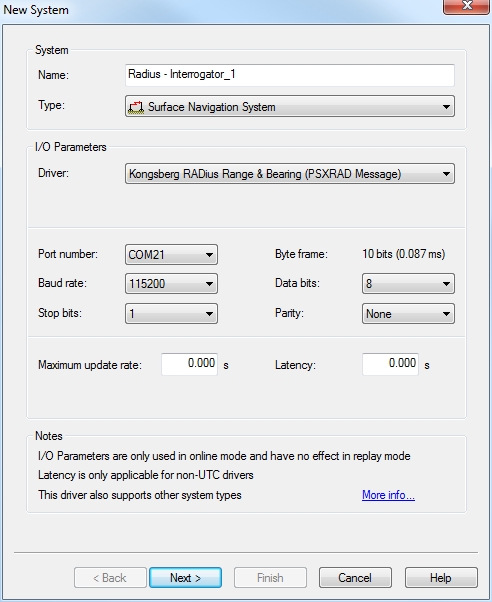
Add a New System:
-
Name: enter the name of the interrogator
-
Type: Surface Navigation System
-
Driver: Kongsberg RADius
-
IO
-
Select the com port you wish to use
-
Use the highest possible baud rate
-
-
Latency: enter a latency when not using a UTC driver
-
-
Observation Definition
-
Add the following observations:
-
Range
-
Angle
-
Vertical Angle
-
-
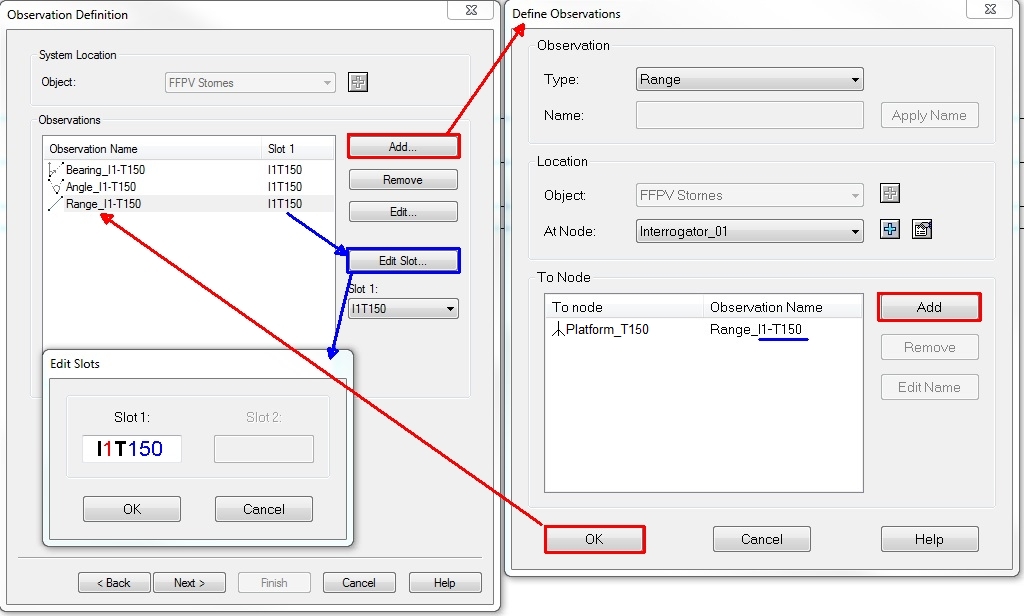
Define observations Interrogator - Transponder
-
Choose the location of the Interrogator as an At Node
-
Choose a Transponder location as a To Node. This node can be:
-
a Node on an object
Used for relative positioning of an object to the main object. -
a Fixed node.
Used when the transponders are installed in fixed locations like: a platform, windmill, monopile
Make sure you enter the correct coordinate and height.
-
-
-
You now need to specify a Slot ID, to tell Qinsy which observation is valid for which interrogator-transponder combination.
The slot ID format is as follows and must be correct, otherwise that observation will not be decoded: -
-
Slot ID format: IxTy
-
x = Interrogator ID, range 1-9
y = Transponder ID
Example 1:-
I 1 T 150 represents an observation from Interrogator 1 to Transponder 150.
Example 2:-
I 2 T 60 represents Interrogator 2 to Transponder 60.
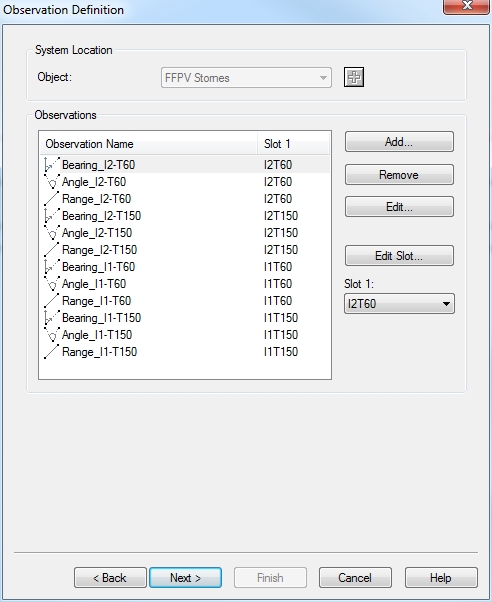
As shown above multiple Interrogators can be added. Each Interrogator can refer to Multiple transponders.
Both examples have been used in the picture above.
-
-
When Next > is clicked, a warning is posted:
The same slot ID is used more than once
Check the slot ID's you have selected for the observations to make sure that you have selected the correct slot ID with each set of 3 observation.
In other words you can use the same slot ID as shown above.
-
-
-
Observation Parameters
Make sure that the correct unit is selected for the observations and that the A-piori SD values are realistic to allow the adjustment and the Kalman filter to properly use the observations and results.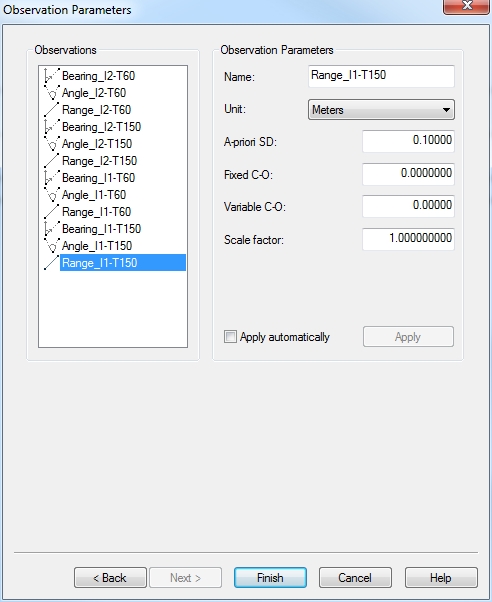
Miscellaneous System
To decode the signal to noise ratio (for your information only), add a Miscellaneous System to your database and select "Kongsberg RADius". This generic observation must also have a slot ID as described above.
ARPA System
In order to show transponder positions as targets in the Navigation display add an ARPA System to your template. In the navigation display under the Target layer the targets can be shown and the labels enabled. This can be very useful for monitoring the performance of the system.
Drivers IO Notes
This driver has some extra options available, which can be en-/disabled by editing the definitions file for all drivers in Qinsy. This file is located in the Qinsy program folder and is called "Drivers.io". By editing this with Notepad and looking for the correct driver number (see above on this page) one can change driver options.
By default, the driver does not check the NMEA checksum in the message. This can be enabled by removing the NOCS option from the line with this driver's number.
By default, the data from this driver is timestamped by Qinsy. If you would like to use the timestamp in the message, add UTC to the driver's entry. Note that you need a valid Time Synchronization System (PPS) for this to work.