
Object Linking System
The object linking functionality in QINSy is designed to calculate the exact position and attitude of multiple objects that are physically connected with a swivel joint or a hinge.
For example:
-
a crane comprises a cab where the operator sits, a boom that is hinged to the cab, a stick that is hinged to the boom, and a bucket that is attached to the stick via a hinged or swivel joint.
-
a cutter suction dredger employs a ladder hinged at the trunnion of the pontoon and a cutter head attached to the ladder.
-
on a hopper suction dredger the dredge head is hinged to the lower suction pipe, which in turn is hinged through the swivel to the upper suction pipe and onto the suction connection.
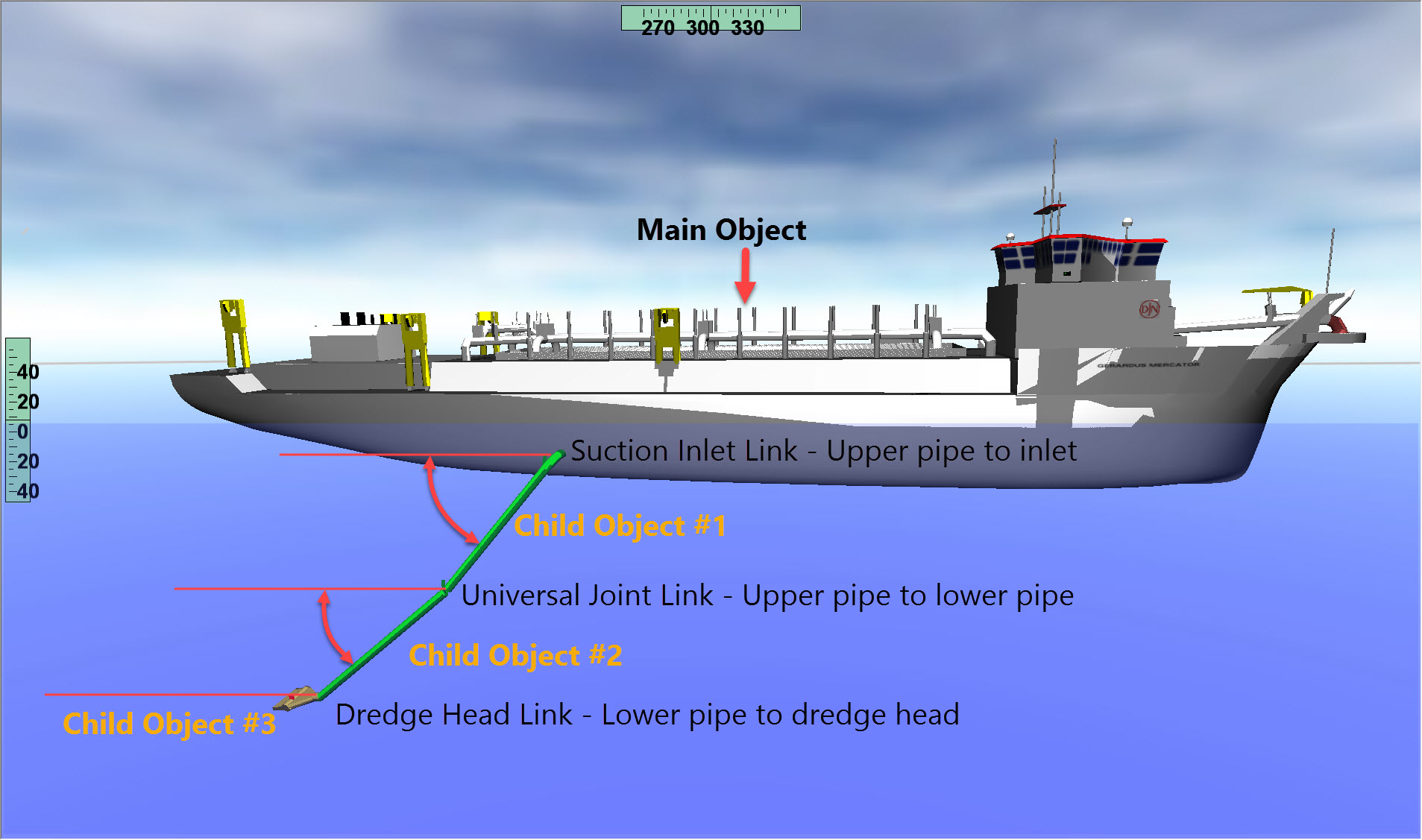
Each component is an 'object'. The idea is to "link" one object to another or in other words: to establish a relationship between the object pieces making up the whole. There is usually a main object which is fully positioned and oriented, i.e. the main object should have its full position and attitude known. Since the other objects of the whole bear a relationship to the main object, you only need an angular observation on the axis of the joint in order to link one object to another. The observation can be either an absolute or a relative observation. This is akin to creating a parent-child relationship, i.e. the linked object position is dependent on the main object position.

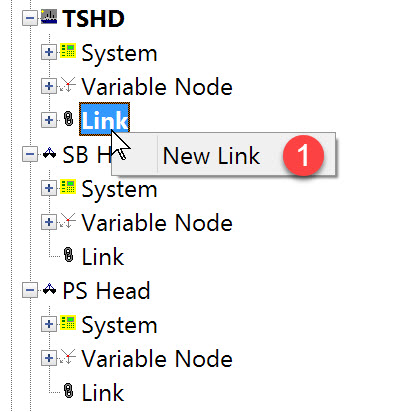
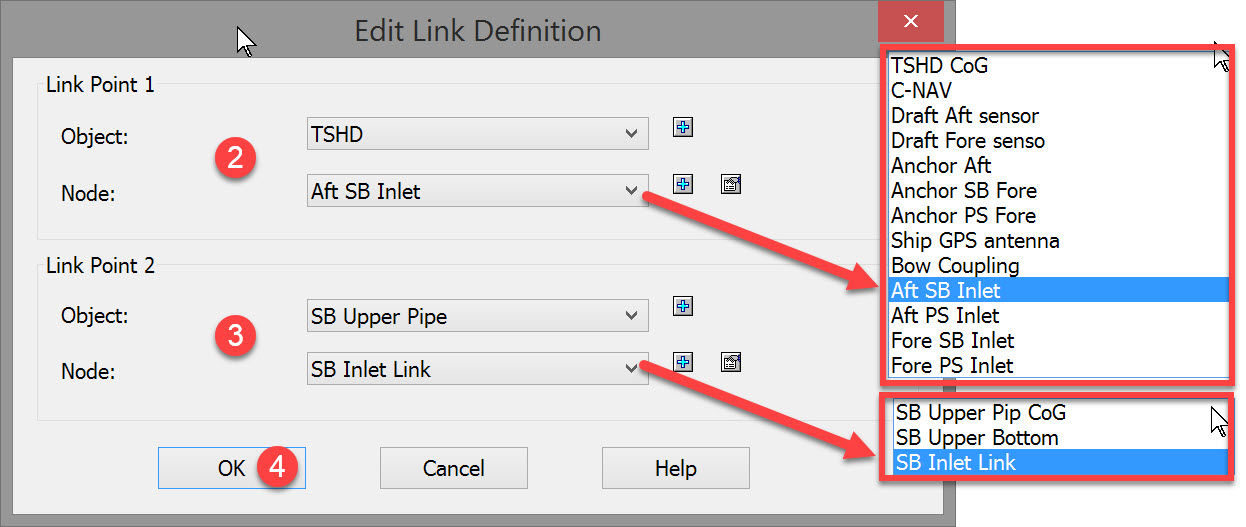
The following dialog opens.



Return to top of page.
Return to: Trailing Suction Hopper Dredger (TSHD) - System Definitions