
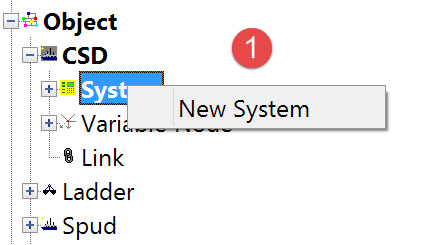
Surface Navigation System
Observations defined under a Surface Navigation System are: Range, Angle, Bearing (True) and Vertical Angle.

The following dialog opens. It is the first page of a wizard that steps you through the system definition process.
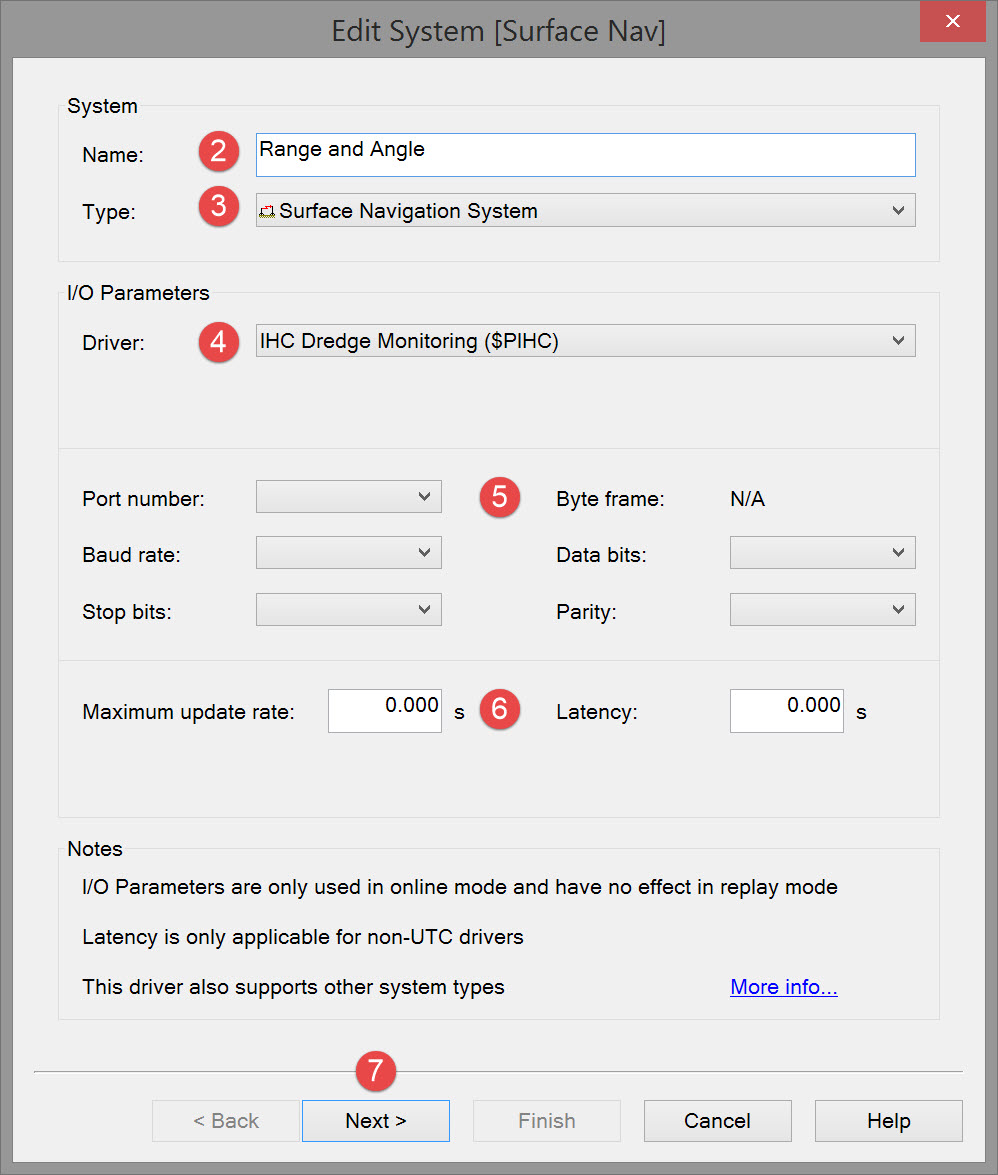


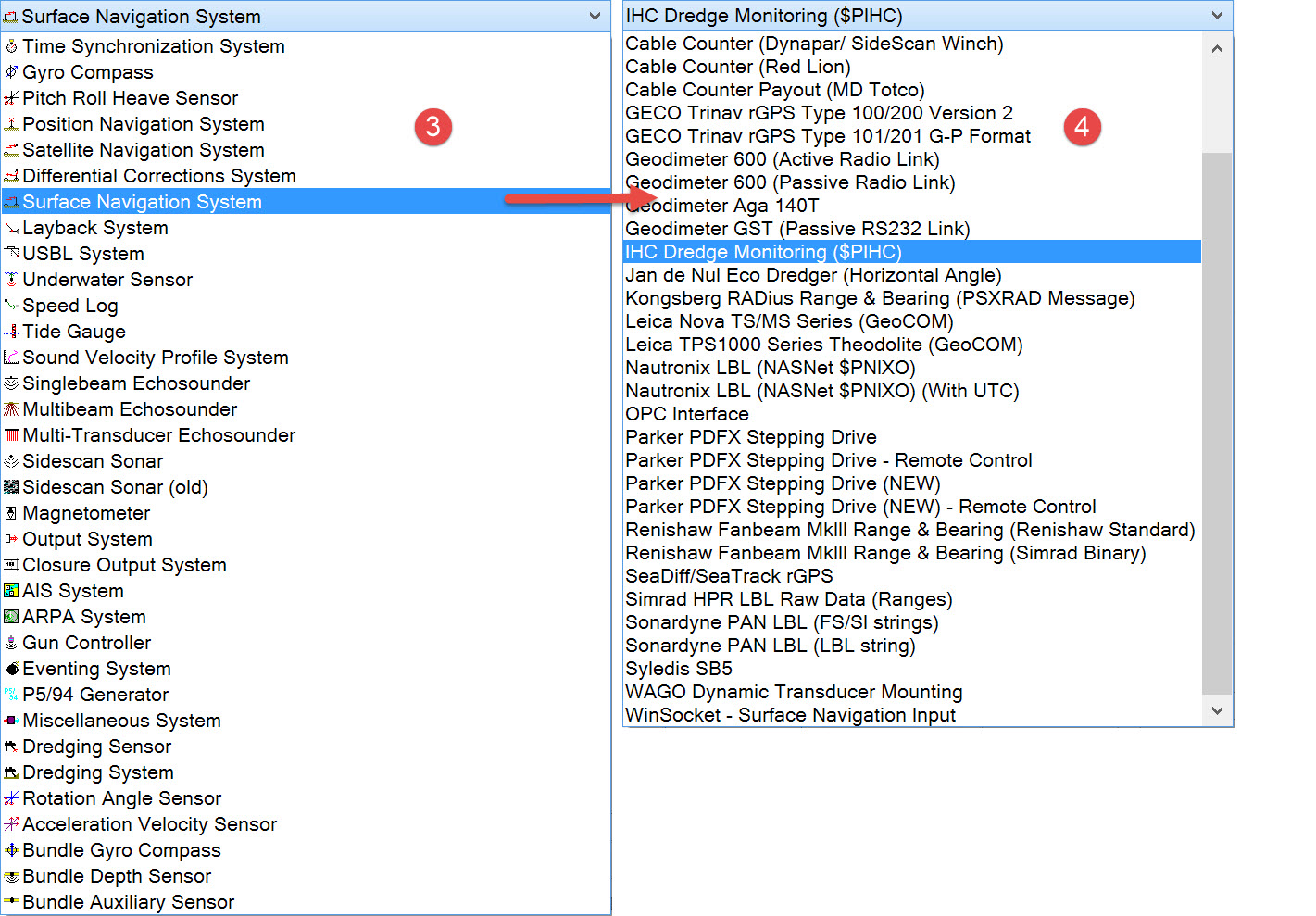

The driver list includes both serial and network drivers. If you have already defined other systems and some of the data messages are sent by the dredger's PLC, it is likely that this data will also be issued by the PLC.

Please refer to A Note on Interfacing Parameters.

|
Updates |
|
|---|---|
|
Maximum update rate |
Enter a value to determine how often data will be decoded by the interface driver. Some equipment is capable of outputting data at high output rates, but it may not be necessary to use each update. A motion sensor system may for example output values hundreds of times per second, where twenty times per second is sufficient. In this case, enter a value of 0.05s. Any data not decoded by the driver is lost and cannot be recovered later. |
|
Latency |
Latency is the time between the actual measurement made in the motion sensor system and the time the data message arrives at the port. The time in QINSy will thus be the arrival time corrected with the latency.
|

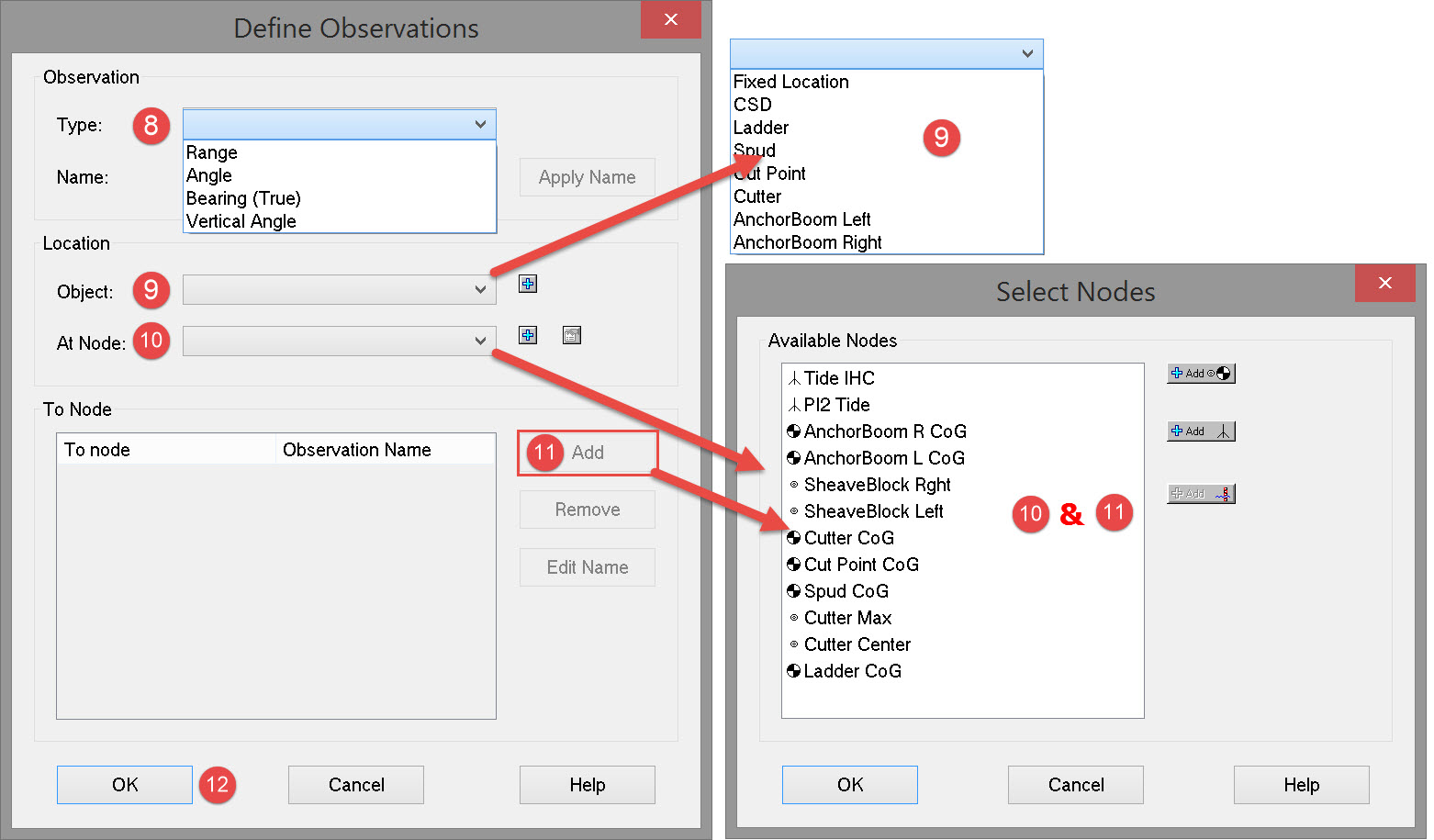




If the node you want is not yet defined (i.e. appearing in the list) use the 
If the node you want is not yet defined (i.e. appearing in the list) use the 

Click Add again in this dialog to define additional observations if they are needed.

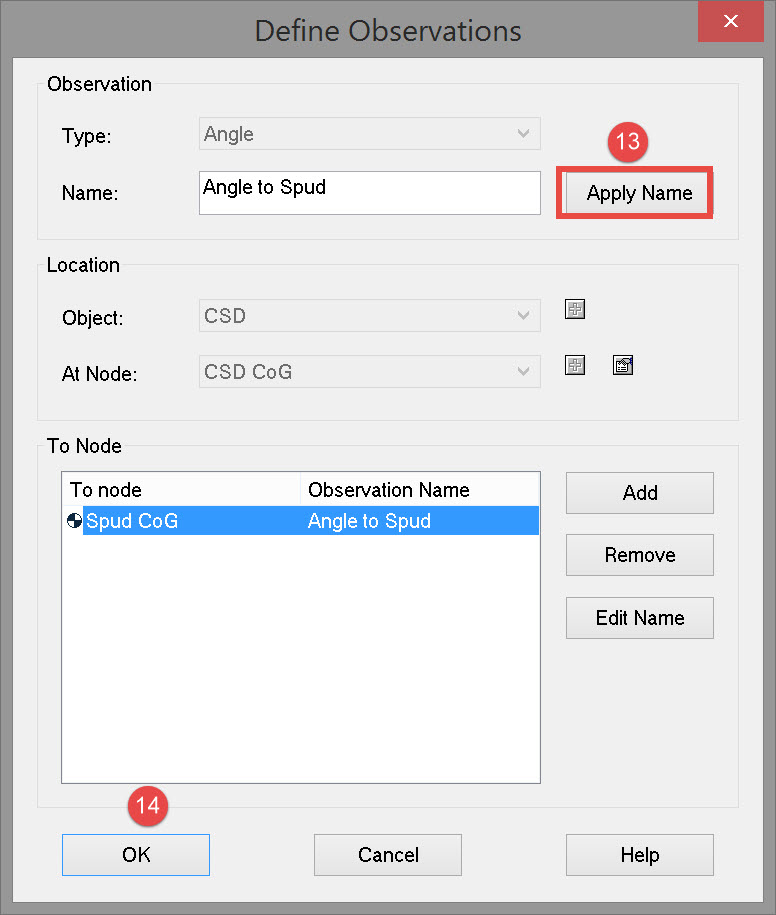

Then Click Next to advance to the last page of the wizard.

|
Observation parameters |
|
|---|---|
|
Name |
Enter a descriptive name for the observation. |
|
Unit |
Select the appropriate observation unit. In some cases there will only be one choice. |
|
a-priori SD |
Enter the SD for each observation in turn. |
|
Fixed C-O |
Constant correction to the parameter value. |
|
Variable C-O |
Variable correction to the parameter value. |
|
Scale factor |
Use scale factor to convert the raw output to units in the Acquisition Software.
|
|
Apply C-Os offsets first |
C-Os are added or subtracted before a scale factor is applied. |
|
Apply Scale factor first |
Scale factor is applied before C-Os are applied. |
|
Apply automatically |
The order in which corrections are applied is done in the software. |

Return to top of page.
Return to: Cutter Suction Dredger (CSD) - System Definitions
or
Return to: Trailing Suction Hopper Dredger (THSD) - System Definitions