Description
Driver to decode laser data from 2G Robotics ULS-500 laser scanner, or any other laser scanner that outputs data using the LAS format in UDP.
.JPG?cb=4277c881d9149855e00c5d186d728455)
Only use this driver for older scanners, outputting data packets with 1400 points per profile.
Do not use this driver when you are using the newer ULS-500 PRO, outputting packets with 2048 points per profile.
For this please refer to the related page Laser Scanning - 2G Robotics ULS-500 PRO
Driver Information
|
Driver |
LAS |
Interface Type |
UDP |
Driver Class Type |
UdpClient |
|---|---|---|---|---|---|
|
Yes |
Input / Output |
Input |
Executable |
DrvLAS.exe |
|
|
Related Systems |
|||||
|
Related Pages |
|||||
Decoding Notes
This driver supports the LAS specification up to version 1.4.
The table below depicts the general format definition for the LAS format.
|
Header |
|
Variable Length records |
|
Point data records |
|
Extended variable length records |
The entire LAS format must be encapsulated into one UDP packet. Fragmentation over multiple UDP packets is not supported by the driver.
The data decoded by the driver is contained in the "Point data record" structure of the LAS definition.
Specification 1.4 describes 11 formats for the point record format.
All formats are supported, but some point record formats do not support GPS time.
The table below shows which data is decoded by the driver:
|
Value |
Decoded from |
Available in Point Data Record format |
|---|---|---|
|
X |
Point data record : X |
0 up to (and including) 10 |
|
Y |
Point data record : Y |
0 up to (and including) 10 |
|
Z |
Point data record : -Z |
0 up to (and including) 10 |
|
Intensity |
Point data record : Intensity |
0 up to (and including) 10 |
|
Time |
Point data record : GPS time |
1,3,4,5,6,7,8,9,10 |
|
Quality |
Point data record : User Data |
0 up to (and including) 10 |
Database Setup
First, internally the driver is treated as a multibeam system, creating multibeam 'xyz' observations, therefore you will find the laser system drivers under category type Multibeam Echosounders.
('multibeam' versus 'laser scanning'-terminology: ping = scan, footprint = pixel = pulse, swath = line)
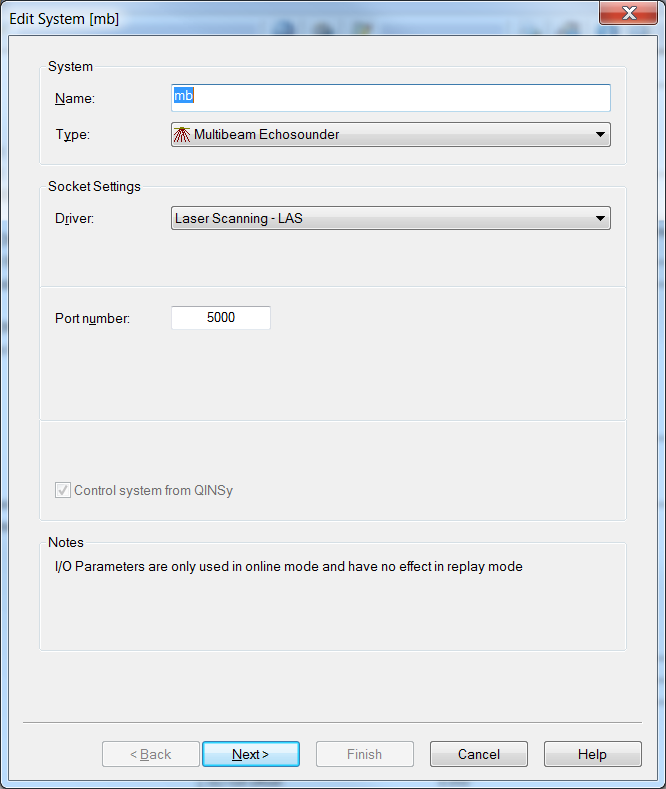
Edit System Wizard
Add a Multibeam Echosounder system to your template setup and select from the list driver "Laser Scanning - LAS".
-
The Port number should be set to the port number the unit will send its messages to.