
Description
Driver for decoding the depth value from a Navitracker Density Probe as a "ROV Depth" observation.
Towed behind a vessel, this probe measures continuously the sediment density.
In order to decode the sediment density, please refer to document Decoding Density Observation.
Besides the depth value it outputs also the x-offset and the layback of the sensor.
In order to decode the x-offset and layback, please see document Decoding Position.
Driver Information
|
Driver |
Generic - Navitracker Density Probe |
Interface Type |
Serial |
Driver Class Type |
Terminated |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
NavitrackerDensityProbe.ini |
|
|
Related Systems |
|||||
|
Related Pages |
|
||||
Interfacing Notes
The driver is a so-called passive driver, i.e. it does not send commands or data back to the sensor. Therefore only a one-way cable wiring is needed.
One-way Cable wiring diagram:
|
DB-25 |
Sensor |
or |
DB-9 |
Sensor |
|
DB-25 |
COM |
or |
DB-9 |
COM |
|---|---|---|---|---|---|---|---|---|---|---|
|
Pin 2 |
TXD |
|
Pin 3 |
TXD |
----- |
Pin 3 |
RXD |
|
Pin 2 |
RXD |
|
Pin 3 |
RXD |
|
Pin 2 |
RXD |
X |
Pin 2 |
TXD |
|
Pin 3 |
TXD |
|
Pin 7 |
SG |
|
Pin 5 |
SG |
----- |
Pin 7 |
SG |
|
Pin 5 |
SG |
Database Setup
Define in Db Setup a system of type 'Underwater Sensor' and select the driver 'Generic - Navitracker Density Probe'.
Set the right I/O parameters and select Next. On the 2nd wizard page, select first the object that represents the probe (tow fish).
Then, highlight the Depth observation and select Edit. Select the node located on the towed object that represents the depth sensor. OK and Next.
On the Observation Parameters page, change the following setting:
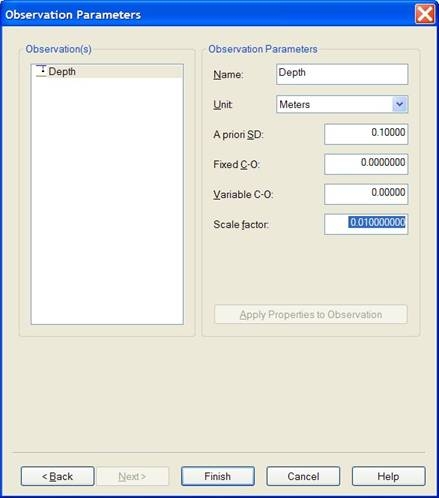
-
Scale factor: 0.01
Due to this settings, the raw depth values, in cm, will be converted to meters
Don't forget to hit the Apply Properties to Observation button, before finishing.
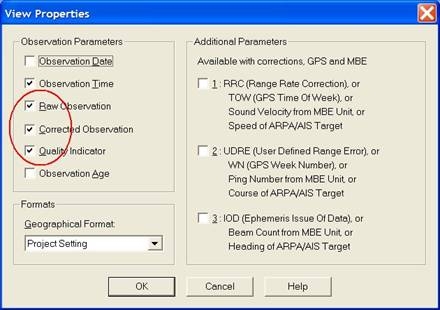
Online
Both the raw and the actual depth value may be monitored on-line using an Observation Physics or a Timeplot Display.
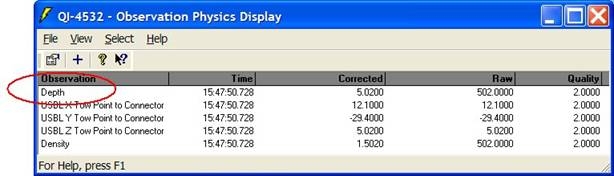
The mode status (1 or 2) can be monitored as quality indicator of the Density observation.
The depth observation is decoded as a so-called ROV-Depth observation. You may use this observation in the Computation Setup as the vertical component to position the tow fish object.