
On this page:
Voting System Items Implemented
IssuekeyTypeSummaryVotesKey
Singlebeam Setup
In Qinsy 9.4 we have introduced a more simplified and easier-to-use setup for singlebeam surveys.
Settings are moved from offline to online setup
You can now use the online setup to modify a possible transducer draft correction, the used sound velocity and the calibrated sound velocity.
Advantage
You can stay online when establishing the actual sound velocity and/or transducer draft from a bar-check calibration and you want to use these values instead of the values as entered in Database Setup.
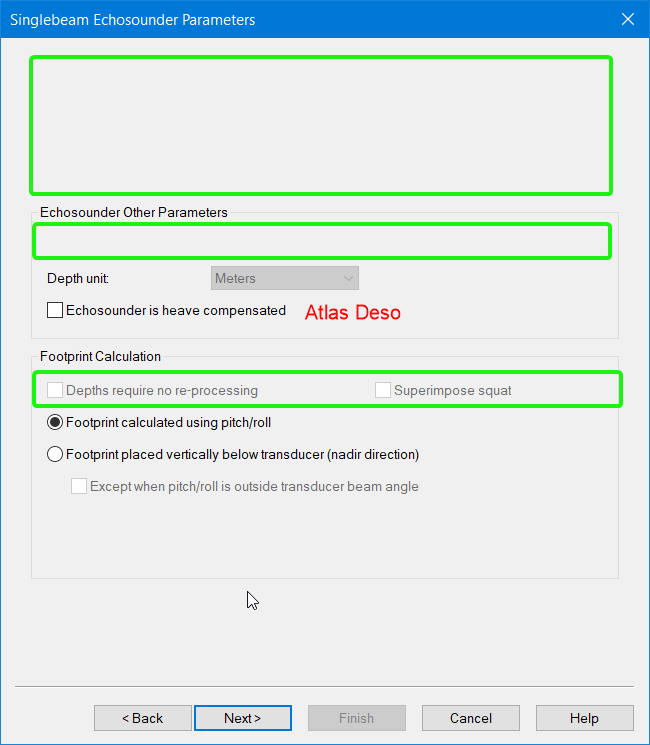
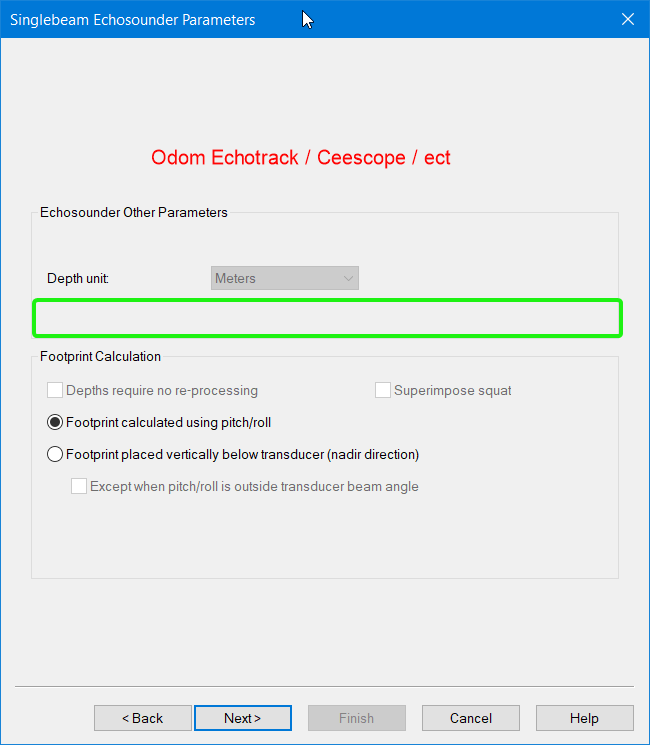
Hiding unnecessary settings
We now only show those items in the setup that are not likely to change in normal survey operations.
Depending on the selected echosounder driver, the draft, index/phase center offset and sound velocity might already be decoded and will no longer need to be specified in the setup.
Items like transducer draft and used sound velocity will now be offered online.
Advantage:
You won't be bothered anymore with settings which are already known by the selected format, which will simplify the setup for you, as well as for you to train your team members.
Using the Depth Below Transducer
We now always reduce the depth to a depth below the transducer and use this in all other locations. This prevents issues with displaying Water Column Data in displays.
New singlebeam setting
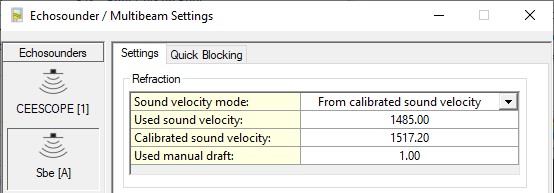
A new important setting has been introduced in the online setup: the Sound velocity mode.
Use the Sound velocity mode to improve the measured depth from the unit with a more accurate sound velocity or sound velocity profile if needed:
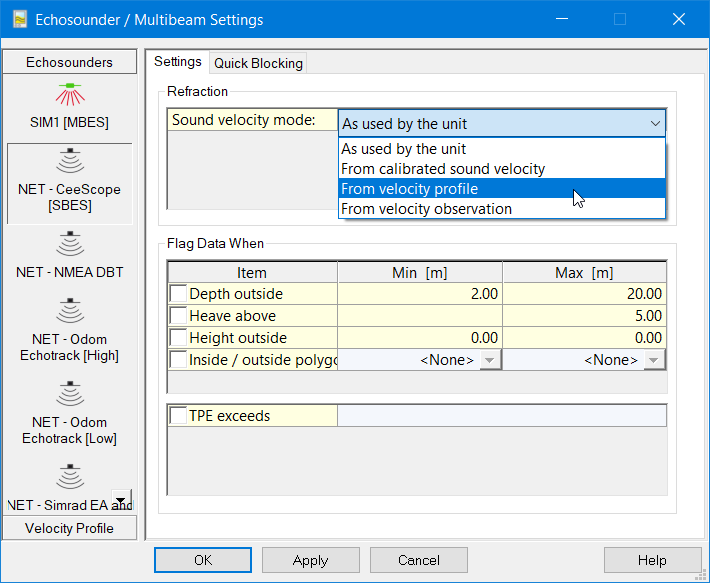
Advantage:
The reported depth from the unit will become more accurate.
Use Transducer draft as Vessel draft observation.
When an echosounder has the draft value included in its message, you can now add an underwater sensor to decode the draft as a draft observation.
You can use this for the vessel draft:
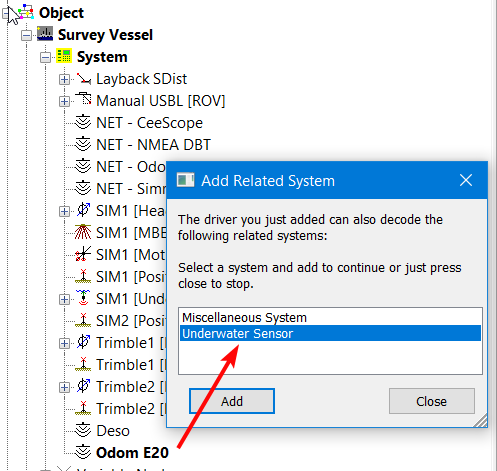
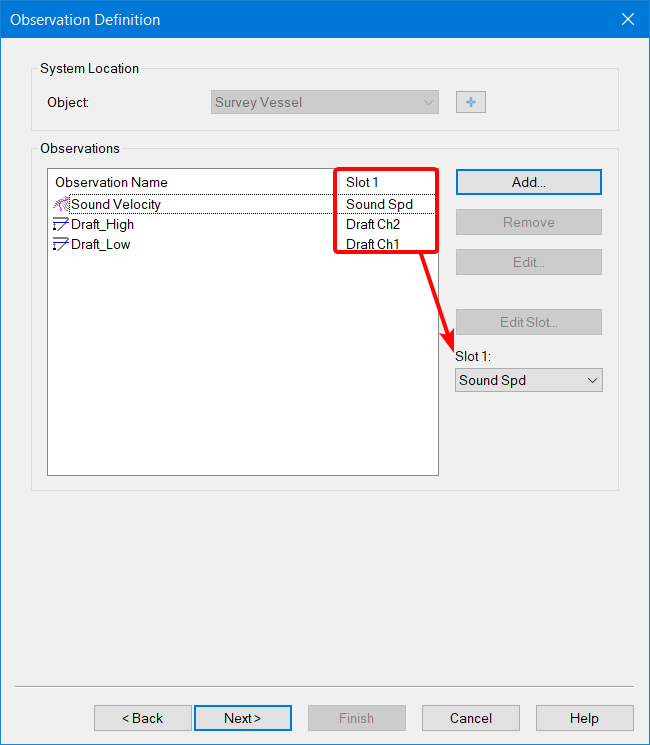
Note that each channel has its own draft setting on the echosounder unit.
The draft observation can now be used for the vessel draft:
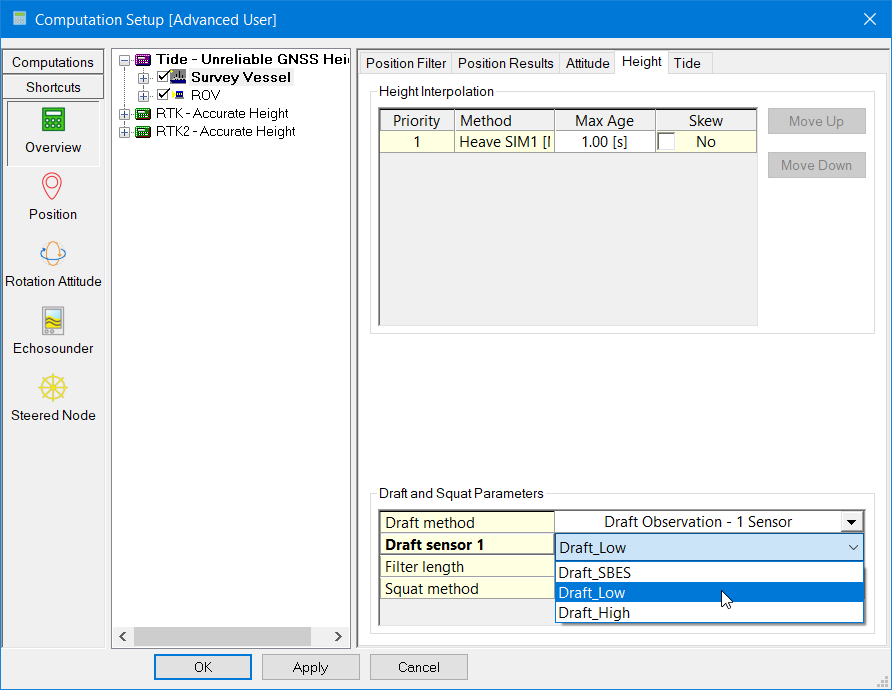
Advantage:
In a simple singlebeam setup you can now prevent draft errors between the vessel and the echosounder.
Echosounder Display:
The Echosounder Display has been updated to support:
-
Depth Below Transducer;
-
Actual water Depth;
The depth measured relative to the (Mean) Actual Water Level. -
Chart Datum Depth.
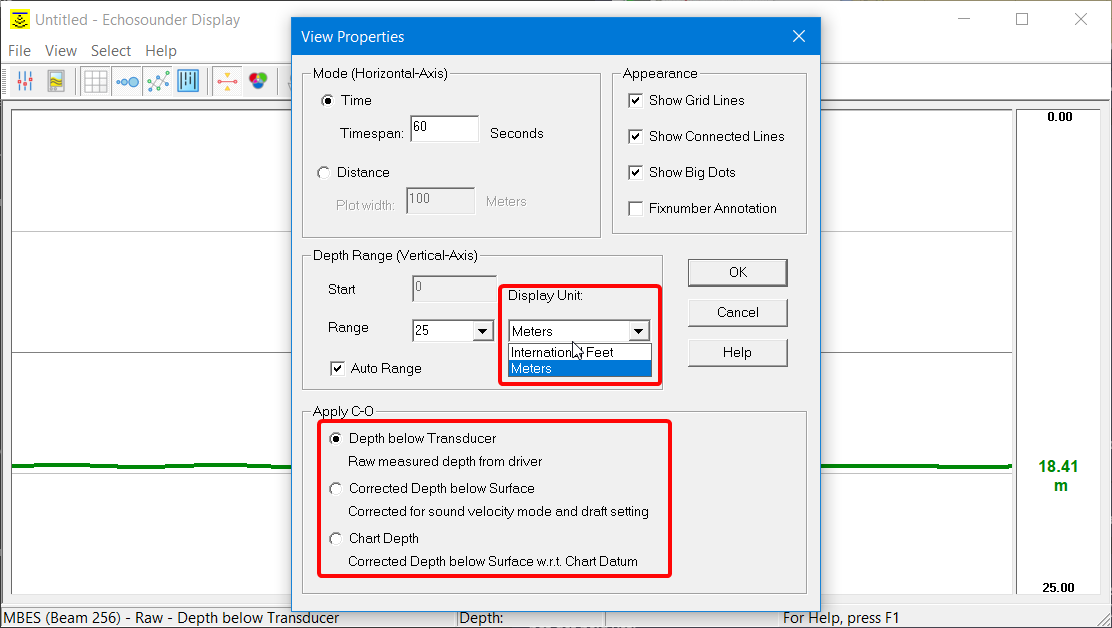
You can now choose to show the depth in Meters or Feet.
Generic Display / Generic Layout Editor
The changes for singlebeam have been made available in the Generic Layout Editor and can be used in Generic Display.
Please read the updated documentation for more details: .
Observation Physics Display
Singlebeam echosounder depth observation.
When your selection contains a depth observation from a singlebeam echosounder then the values in the columns may depend on refraction settings as defined in the Controller:
-
Column Corrected: The reported depth corrected for draft and sound velocity.
-
Column Raw: The measured depth (i.e. depth below transducer) as reported by the unit and possibly uncorrected for the draft.
-
Extra Column Parameter 1: The used sound velocity as reported by the unit or entered from the setting above.
-
Extra Column Parameter 2: The calibrated sound velocity as entered above, or the selected velocity observation, or the mean sound velocity from the selected profile.
-
Extra Column Parameter 3: The used draft values as reported by the unit or as entered from the setting above.
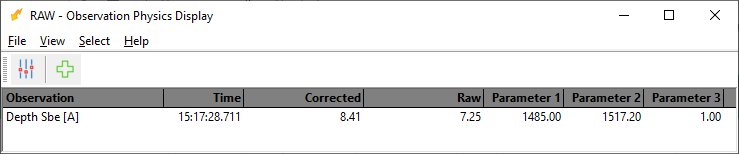
In this particular example the Corrected depth is derived as follows: 7.25 * (1517.20 / 1485.0) + 1.0 = 8.41 m (which should represent the depth below water surface).
Units
Drivers and Displays have been updated to support the selected Survey Unit for displaying and outputting of results.
Console
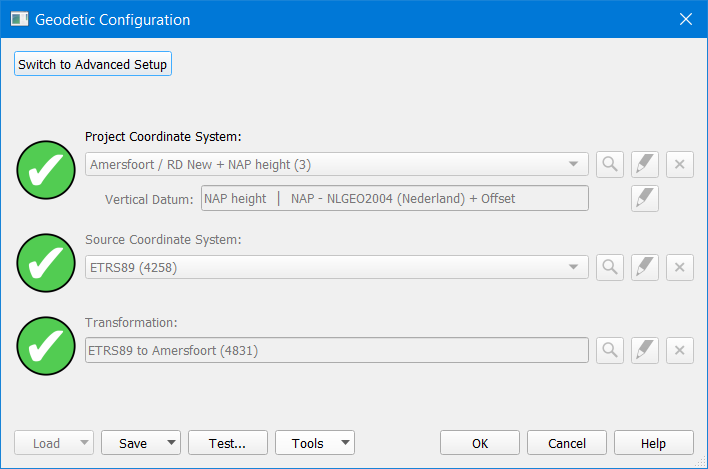
Geodetic UI - Custom Spheroids
It is now possible to define custom spheroids.
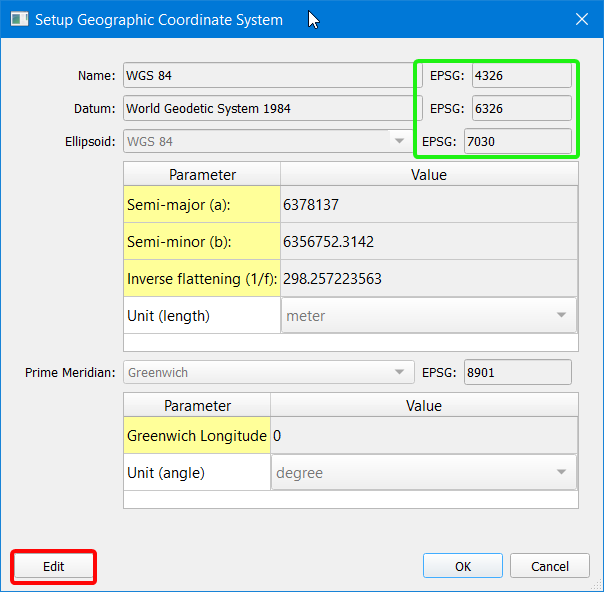
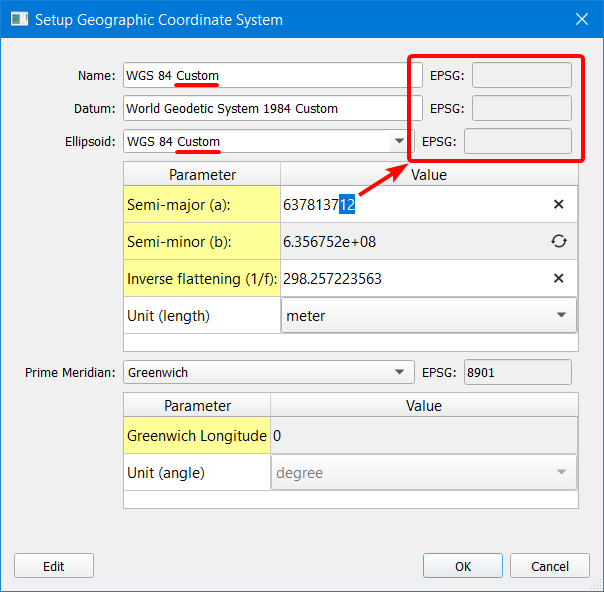
When editing a spheroid, the EPSG codes are no longer valid and removed, since the custom spheroid no longer matches that associated with the EPSG codes.
The custom spheroid parameters will be stored in the WKT, QPS Project File and in the Template DB file.
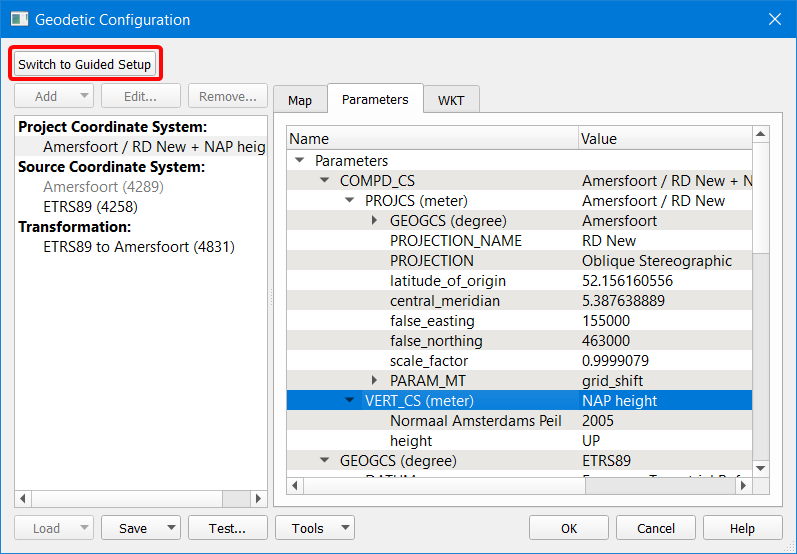
Geodetic UI - View Only mode
In previous releases, the Geodetic UI could not be opened from the Qinsy Console when other parts of Qinsy were opened.
This was done as those parts were using the information from the Geodetic Setup defined in the the Geodetic UI.
This in now solved by making the user interface available in a view only mode.
Setup
Underwater Sensors
When working with dredging equipment, the dredge/cutter head from a Trailing Suction Hopper Dredger (TSHD) / Cutter Suction Dredger (CSD) can be reported in:
-
dX, dY, dZ (USBL system)
-
dX, dY, Depthcorrected for tide
-
E, N, H (Positioning System)
When its reported dX, dY, Depthcorrected for tide there was always the question how to interface this when using multiple computations in Qinsy.
The reported dX and dY can be used by a USBL system, but the Depthcorrected for tide cannot. The Depth can be seen as DepthCD (Depth relative to Chart Datum) or a -Height and this is not supported by the USBL system.
The question remains how to set this up. In previous versions, we could apply Tide settings to each object separately and disable tide for the dredge head, but you needed to set a specific registry key to allow that functionality.
This made setting up multiple computations more complicated as you needed to look very closely which tide settings were used for each object in each computation.
When moving your setup to another PC, you needed to be aware of these registry settings.
We created a more user friendly solution which removes the registry challenges and allow users to just use their setup (Template DB) on another PC from Qinsy 9.4.0 onward.
In the setup of your Template DB you can now choose if the Depth observation is related to the "Water Level" or if it is already "Tide Corrected":
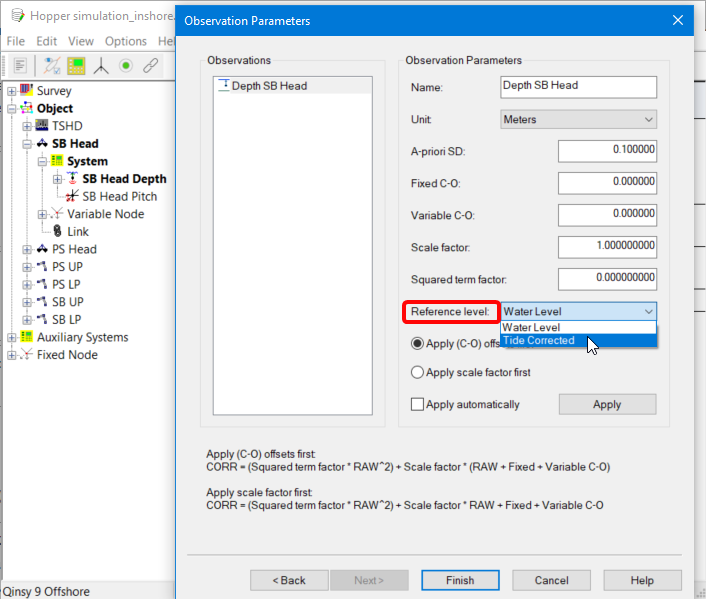
Online you can now use the USBL systems to decode the dX and dY and use an underwater sensor to decode the Depth being Tide Corrected (DepthCD) and use synchronized water level reference for all objects within your computation:
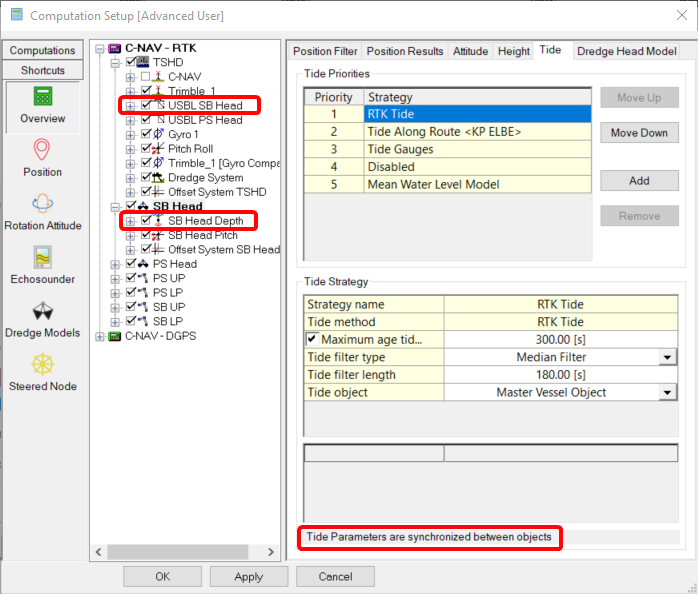
You can see if the Tide Parameters are synchronized between objects at the bottom of the Tide tab.
Drivers
Singlebeam
Most singlebeam drivers have been updated with the above echosounder changes.
This will make some drivers obsolete and they will be phased out in the future.
Magnetometer - Geometrics G882 - Add ini driver to Qinsy distribution
We added 4 generic drivers for the Geometrics G882 of which 2 are serial and 2 are network drivers.

These drivers allow for parsing of multiple magnetometers within the same driver by defining which MAG (i.e. MAG1 is first four fields, MAG2 is second four fields, etc.)
It is based on using the standard output of MAG data from G882:
MAG1 Total Field, MAG1 Signal, MAG1 Depth, MAG1 Altitude, MAG2 Total Field, MAG2 Signal, MAG2 Depth, MAG2 Altitude...
We included the Altitude to be recorded as a singlebeam system so that it is written to the QPS *.qpd file.
This will allow for easier setup when the user would like to export OASIS *.gdb files.
Output - Autopilot - NMEA APA Offtrack feature
We added the option to enter an XTE Offset for all supported NMEA output formats.
This additional offset will be appended to the outputted cross-track error value.
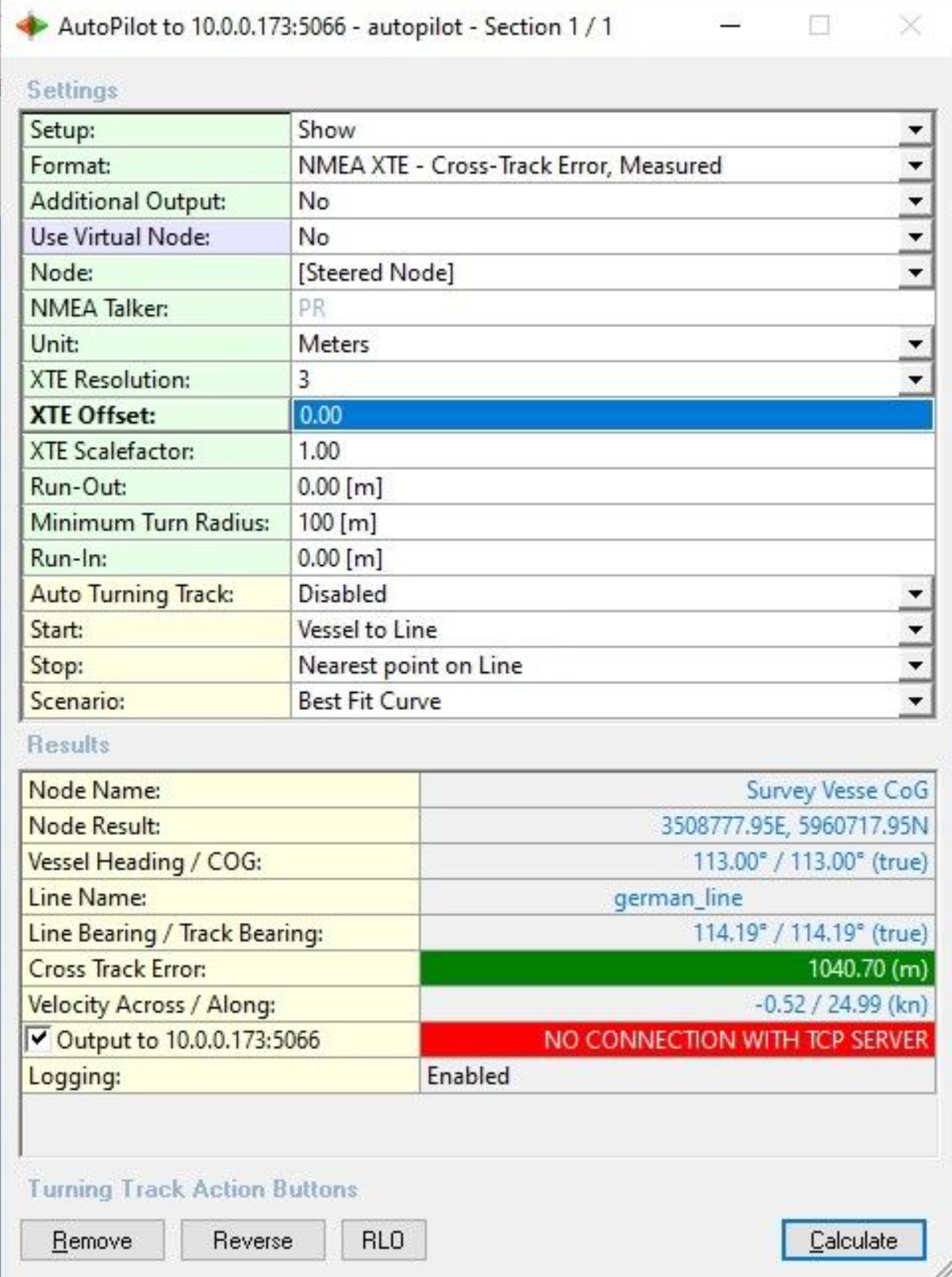
A nice feature during any type of towed vehicle operation to maintain the main vessel offset to keep the towed fish on line.
Online
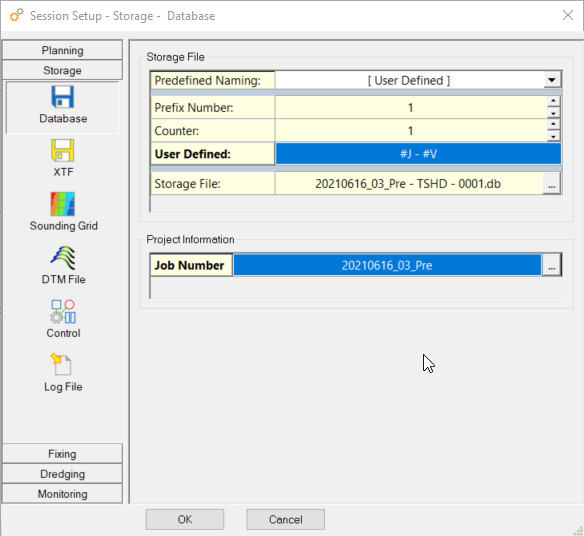
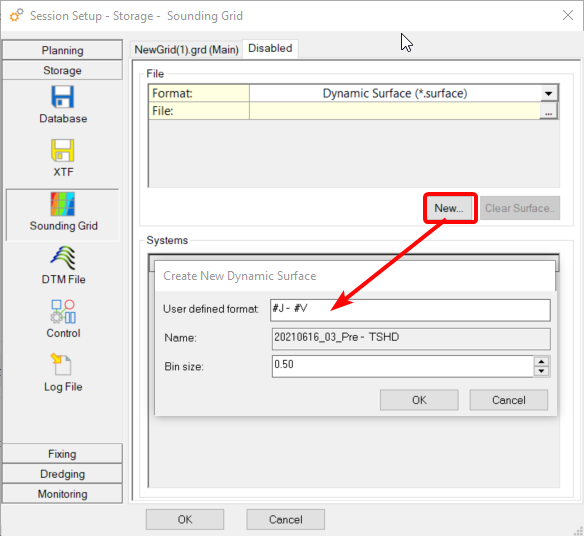
Storage - Parameters to include Job Number and Vessel Name
You can now include the Job Number into your Database names and in the Dynamic Surface file name when creating a new Surface:
Survey Manager
GISGRO

GISGRO is a smart port management system that helps ports, their clients and subcontractors to work smarter. It holds the ability to view and utilize port and asset data quickly and easily online.
The Qinsy 9.4.0 installer will install a Gisgro module that allows you to upload your data to Gisgro when you have an account and login details.
Recently Gisgro has released a new version of this module, but this is not distributed by the Qinsy installer. Please contact Gisgro for the new version.
When the new module is installed, the Qinsy 9.4.0 Survey Manager will automatically recognize the version and use it.
Previous Qinsy versions will not be able to use the new Gisgro version.
Licenses and added options
Qinsy Singlebeam
Beside the above changes we also extended the options for the singlebeam license and allow you to add more:
-
Displays
-
Observation Physics - (since 9.3.1) to check if data is decoded by the drivers.
-
Timeplot - to monitor a waterline node.
-
-
Systems
-
-
Multiple Single Beam Echo Sounder (SBES) systems (3x) to decode SBES messages that we do not support yet. You can do this by using the IO Driver Editor in from the Qinsy Console.
As the IO Driver Editor can only decode 1 channel per system and a SBES can contain 3 channels were therefore decided to allow 3x SBES. -
Underwater sensors (now 2x, was 0) to decode sound velocity and draft observations by the updated echosounder drivers.
-
Eventing systems (not restricted anymore).
-
Qinsy 9
Beside the above changes we also extended the options for the Qinsy license and allow you to add more:
-
Systems
-
-
Underwater sensors (4x, was 1) to decode sound velocity and draft observations by the updated echosounder drivers .
-
Eventing systems (not restricted anymore).
-
Qinsy 9 Marine Construction
Added the option for an OPC UA Add-on.
Qinsy 9 Offshore
Added the option for an OPC UA Add-on.