
Description
Driver to decode Multibeam bathymetry data for a Tritech Gemini Multibeam Profiler over the network via TCP/UDP.
This System delivers up to 256 beams. For more information refer to the manufacturer website http://www.tritech.co.uk.
The driver cannot be used to control the system, it will only listen to the data and decode it. The control of the system will have to be done with Tritech's own software. The driver will assume that the Tritech Gemini system is synchronized to UTC. An unlimited number of sonar heads can be decoded but in practice the number will be limited to one or two heads.
Driver Information
|
Driver |
Tritech Gemini Sonar |
Interface Type |
UDP/IP Client |
Driver Class Type |
|
|---|---|---|---|---|---|
|
Yes |
Input / Output |
Input |
Executable |
DrvQpsTerminatedUDP.exe |
|
|
Related Systems |
|||||
|
Related Pages |
|
||||
Decoding Notes
-
Various messages are transmitted by Gemini, but only packet Type 00 which contains the bathymetry is decoded. Other messages are ignored.
-
Each bathymetry message contains the device ID: a unique number per sonar head. The driver will use this ID to match the data to the correct system.
-
If the driver was started with the PPS command line argument (default), then the time tag as provided in the packet is used.
-
The sound velocity that is decoded is the sound velocity used by the Gemini system to determine the beam angles.
-
For each beam, the following is decoded: the beam angle, the travel time and the intensity (a value between 0 and 65535).
-
The Gemini system has an option to transmit framed NMEA messages. The binary frame contains a timetag. These messages can be decoded and used as well.
Note that the 'unframed' version of these messages, without a timetag, is not supported by Qinsy.
Interfacing Notes
At the time of writing the exact details are unknown.
The data will be broadcast by the Gemini system over the network via UDP so make sure that the IP-address and sub-net mask of the network adapter in the Qinsy computer are valid.
On the Gemini system, you need to set a target IP-address and port.
Settings in Tritech Gemini Software
In order to use the framed NMEA messages, make sure the target IP-address ends with 255. This will set the unit in broadcast mode, which allows different drivers to read data on the same port.
So, for example, if the Qinsy computer's IP-address is 192.168.1.36, set the target IP-address to: 192.168.1. 255 .
Make sure you select for Network Data Output: Framed messages. The unframed variant will not be decoded.
Database Setup
Add New Multibeam System to the template, select Driver "Tritech Gemini Profiler" and the proper UDP port number on which the Gemini broadcasts, for example port 52905. Go to the next page. The Transducer Setup can be set to use a common acoustic center. Since the RX and TX are so close it is not necessary to assign separate TX and RX nodes, so just select a common acoustic center. The maximum number of beams should be set to 256. The Slot Identifier should be filled in properly, this Device ID can be found on a label on the sonar transducer head.
If this is not filled in properly the data will not be decoded!
For a dual head system you can just add another Multibeam system as described above, again making sure to fill in the Device ID properly.
The Device ID of the transducer head should be filled in properly in DbSetup, multibeam setup pages as the Slot Identifier.
Decoding will fail if not set correctly!
Every Transducer head will have a label on it with the Device ID.
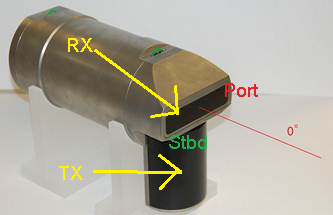
Orientation and Acoustic Center
Single Transducer
For normal bathymetric surveys the Receive transducer faces downwards and the projector (TX) is mounted to the aft. The approximate mounting angles in Qinsy will be RX 0, TX 0, Heading 0.
If for some reason the projector is facing forward then a 180 degree heading should be set.
Dual head transducer
If a dual head system is used then the transducers are usually tilted to each side. The tilt should be entered as a roll offset.
When the projector is facing backward the port system will have a positive roll value and the starboard a negative roll value.
External sensors
Data from various external sensors can be time tagged by the Gemini system and forwarded to Qinsy. These NMEA messages are preceded by a header, containing a timetag. This timetag can be used in Qinsy. Select the proper driver and choose "Tritech Gemini" in the 'Acquired by' selection box. Use the same port number as used for the Gemini sonar driver.
The following drivers can be used:
-
Gyro: Network - HEHDT/TSS1/TSS2 Format (Heading)
-
Positioning System: Network - NMEA Position (GPGGA)
-
Pitch Roll Heave Sensor: Network - TSS1/TSS2 Format (R-P-H)
-
PPS: NMEA ZDA (Network)
If you have a choice, set "Observation time from" to "3rd Party Time tag". That way, the timetag applied by the Gemini system is used.
Additional Information
For more information see the Tritech website http://www.tritech.co.uk.
Drivers IO Notes
PPS (Time Synchronization): With this option the Observation time of the multibeam system is decoded from the message, otherwise the time of arrival is used.