
Description
Driver that decodes bathymetry/sidescan/snippets/timetag (pps) from the Teledyne Odom MB1 Multibeam sonar system. For more information on the system please refer to their website: http://www.teledynemarine.com/mb1
The driver acts as a UDP client that listens to the MB1 Image program. This driver will decode data from the MB1 TDY packets. The RTA1 (raw serial data from external sensors) packets are only used for the timetag (pps) decoding in this driver, but the RTA1 packets can also be decoded by other drivers, see below for more info. The MB1 system will use its own time synchronization to PPS/UTC. The MB1 system is controlled by the IMAGE program which will forward the data to the driver. Note that the IMAGE program may run on the same PC as Qinsy.
Qinsy can now also synchronize its internal clock (PPS) to the MB1 RTA1 messages (as of September 2013).

Driver Information
|
Driver |
Teledyne Odom MB1 |
Interface Type |
UDP |
Driver Class Type |
UDP Client |
|---|---|---|---|---|---|
|
Yes |
Input / Output |
Input |
Executable |
DrvQPSCountedUDP.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Decoding Notes
-
The MB1 system utilizes its own time synchronization to UTC. The driver will decode these time tags provided that a working Time Synchronization system driver is part of the setup.
More information can be found in the paragraph Database Setup under PPS (Time Synchronization). -
Decoded quality figures are the range accuracy in samples: best quality will be 1, worst 255.
-
Intensity is not decoded.
-
Maximum 512 beams per ping are reported. The system will only report valid beams, so the beam count per ping will vary.
-
Beam angles are uncorrected with respect to the face of the transducer.
-
Sidescan data samples are downgraded to 16 bits values to fit in the Qinsy definition.
-
The decoded Time Synchronization Timetag uses the RTA1 timetag as the actual time, the update rate is limited to 2 times per second.
Note
The RTA1 external sensor data can be decoded by other drivers using the "3rd party time tagging" mechanism. See Database Setup chapter below.
Make sure that the entered IP address in the IMAGE program is formatted like x.x.x.255 otherwise the data will not arrive in other drivers.
Interfacing Notes
Note
PPS (Time Synchronization) : Use timetag from message. If this option is omitted then the arrival time is used.
System Configuration
The IMAGE program will have to be set up properly so it will send the correct UDP data over the network to Qinsy.
Start the IMAGE program; this should be delivered with the Sounder. Click on the ODOM Icon on the left of the program main window. This will bring up a settings menu. Select Menu Item "Settings".
Enable at least the following Output messages: TDY Raw, TDY Angle Range, TDY Quality, TDY Raw Serial Data.
-For Snippets also activate TDY Snippets.
-For Sidescan also activate Sidescan (NOT Snippets Sidescan).
Press 'Save'.
Next go to menu "Connect" and Highlight tab "Network". Here you can select the TDY IP and port. Enter IP address of your PC but then change the last digit to 255 in order to force a broadcast. Version V1.1.13 or newer required.
This is required to receive data in multiple drivers on the same port. If a firewall is used then the used drivers should be allowed to communicate through the firewall. Choose any free port number, e.g. 4000.
Finally there is one more check box that needs to be enabled. Activate the "Data Management" menu option on the right, select tab "TDY Output" and make sure the checkbox "TDYPort Enabled" is checked.
Then just make sure to restart the IMAGE application. The sending of TDY data over the network also works in IMAGE - Replay mode for testing.
See below for screen captures:
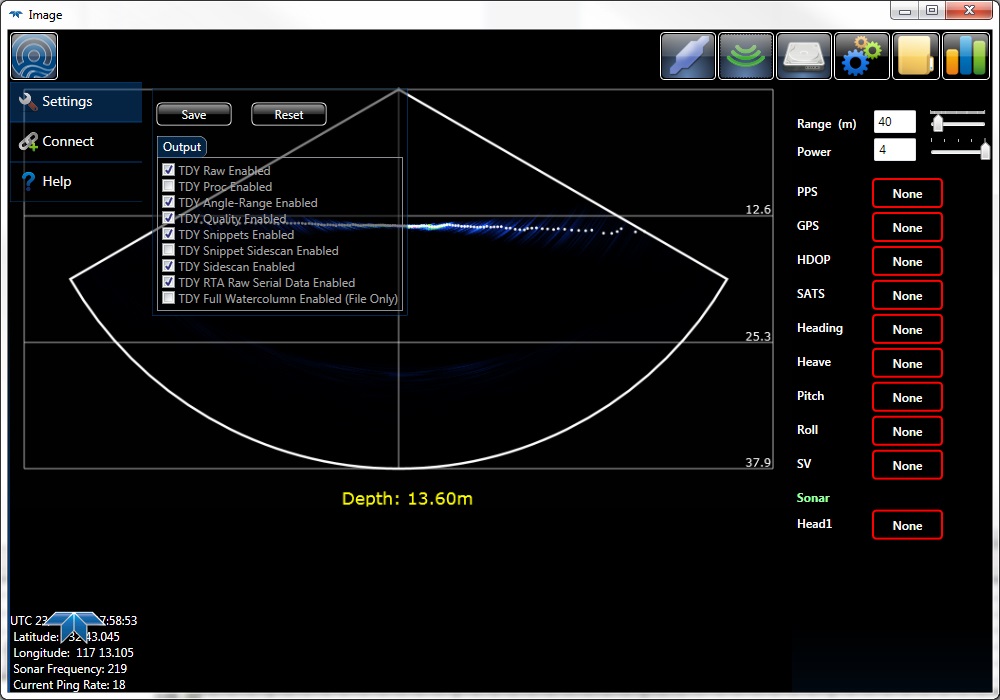
Activate Output messages.
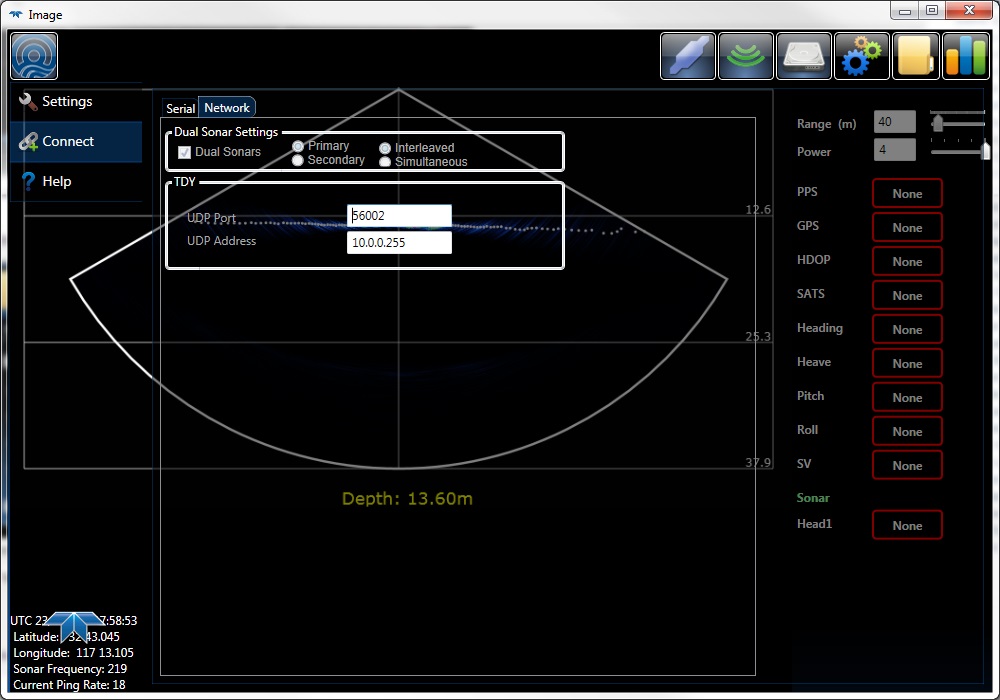
Set the correct IP address and port number.
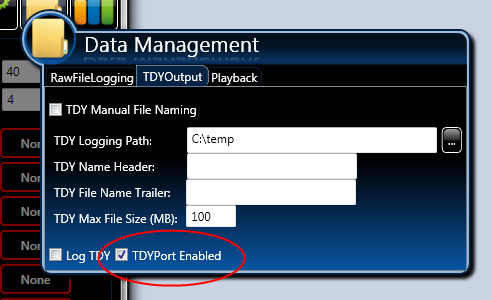
Enable TDY port.
Database Setup
In order to interface the MB1 data into Qinsy various systems can be added to the template database.
Multibeam
Add a new "Multibeam Echosounder" system to the template, select driver "Teledyne Odom MB1" and enter the same port number as was entered in the IMAGE Software under TDY Settings.
Set Transducer Setup to "Assume Common Acoustic Center" and select the correct node that represents the acoustic center of the transducer.
Make sure to select the proper slot number. For single head systems the slot will always be "1". For dual head system the slots will be "1" for the first head and "2" for the second head.
Sidescan
Add a new sidescan system to the template, select driver "Teledyne Odom MB1". Enter the same port number as was selected for the multibeam. Add two channels, the first for port side, the second for starboard side.
Note that currently sidescan is only supported for single head systems.
Time Synchronization (previously PPS)
Add a new system of type Time Synchronization. Select driver "Teledyne Odom MB1". Enter the same port number as was selected for the multibeam. Usage of Time Synchronization adapter is not needed.
It is preferable to have the option to set the Windows Clock NOT disabled.
Make sure that the User Account Control (UAC) in Windows is disabled.
External Sensors
Various external sensors can be time tagged by the MB1 RTA box, e.g. GPS, Heading, Attitude. These messages are time tagged on arrival by the RTA and then forwarded to Qinsy over the network.
The RTA will wrap the message in its own frame (with time tag) and forward it to Qinsy over the network. This time tag will be used by Qinsy when the driver is properly set up.
-
Gyro
Add a new Gyro system and select driver "Network - HEHDT/TSS1/TSS2 Format (Heading)" and the same port number as was entered in the IMAGE software, e.g. 4000. Now select in the "Acquired By:" combo box the entry "Teledyne Odom Hydrographic MB1 (time tagged) ". Sect the "Observation Time" combo box to "3rd party timetag" in order to use the time tag that was determined by the RTA.
-
Pitch, Roll, Heave
Add a new Pitch,Roll,Heave system and select driver "Network - HEHDT/TSS1/TSS2 Format (R-P-H)" and the same port number as was entered in the IMAGE software, e.g. 4000. The other settings are identical to the Gyro settings, see above.
-
Position Navigation System
Add a new system and select driver "Network - NMEA Position (GPGGA)" and the same port number as was entered in the IMAGE software, e.g. 4000. Now select in the "Acquired By:" combo box the entry "Teledyne Odom Hydrographic MB1 (time tagged) ".
Drivers Specific Settings
In Database Setup for this driver some driver specific settings can be entered. These supersede the command line parameters.
The following settings can be selected:
|
Setting |
Option (bold=default) |
Description |
|---|---|---|
|
Raw Bathymetry Storage* |
Disabled/Enabled |
When Enabled the Raw TDY (with bathymetry sections) packets are stored in the database for FUTURE usage in Fledermaus. |
|
Raw Snippet Storage |
Disabled/Enabled |
When Enabled the Raw TDY (with snippet section) packets are stored in the database for FUTURE usage in Fledermaus. |
*) The decoded raw multibeam data is also stored so by enabling Raw Bathymetry Storage the Database will grow larger.
Info
Currently (September 2013) the recorded raw TDY packets can not be processed by Fledermaus yet.