
Description
Driver to decode data from Teledyne BlueView Forward Looking Imaging Sonars.
The following product is supported: M900

Driver Information
|
Driver |
Teledyne Blueview M900 (Forward Looking Imaging Sonar) |
Interface Type |
SDK |
Driver Class Type |
Freebase |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
DrvBlueview_x64 M900 |
|
|
Related Systems |
|||||
The driver supports two modes:
-
Online mode
This mode will be when Qinsy is actually interfaced to a real sonar unit and raw sonar data will be received straight from the unit via a network IP interface. -
Playback mode
This mode is useful for testing/training purposes for simulating the entire Qinsy Forward Looking sonar flow without being connected to a real unit.
In this mode raw sonar data will be read from an earlier recorded sonar file using Blueview raw '*.son' format.
Database Setup
Forward Looking Sonar...
Add a Forward Looking Sonar to your template setup and select driver: "Teledyne Blueview M900 (Forward Looking Imaging Sonar)"
First Wizard Page
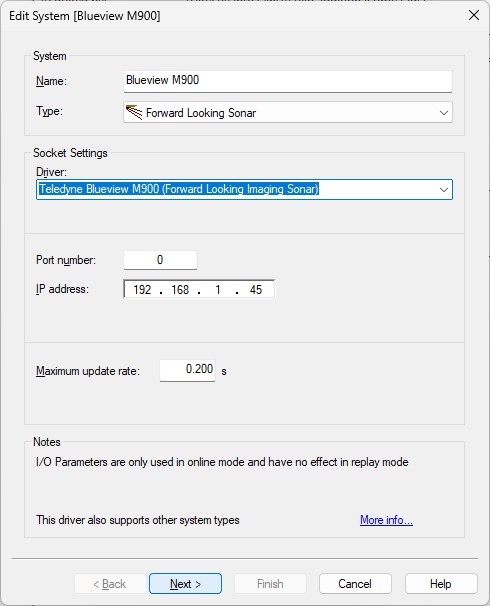
Use the Port number setting to define in which mode the driver should operate when Qinsy is getting online:
-
Online mode
(Qinsy is actually interfaced to a real sonar unit and data will be received straight from the unit via a network IP interface)-
Make sure to set the Port number to 0 (zero).
-
Set the IP address the same as the IP address of the sonar unit.
-
The default update rate will be 0.2 sec. It is not recommended to lower the update rate value d/t possible performance degradation.
-
-
Playback mode
(Simulating the entire Qinsy Forward Looking sonar flow without being connected to a real unit)-
Make sure to set the Port number to -1.
-
The IP address will not be used in playback mode and therefore can be anything.
-
Leave the default update rate to 0.2 sec. Note that it has little effect in playback.
-
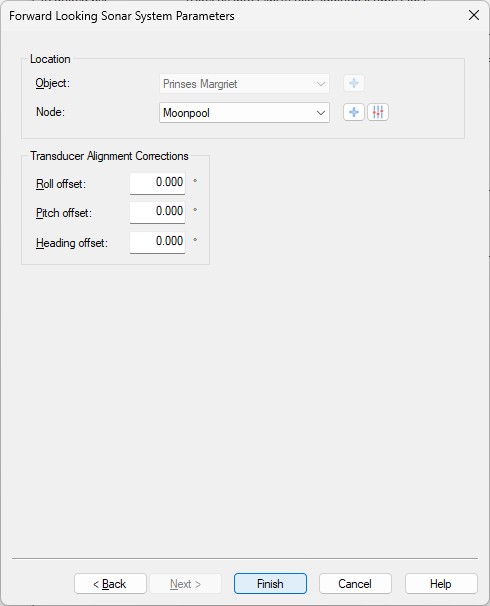
Second Wizard Page
-
Select the correct node location where the imaging sonar is mounted
-
The transducer alignment corrections are currently not used so you may leave the three values to zero.
Online
This driver has no user-interface nor you will find any control settings in the Controller's Echosounder settings.
Therefore you need to set up several displays to see if sonar imaging data is received and decoded.
Click to expand...
Online Mode
(Qinsy is actually interfaced to a real sonar unit and data will be received straight from the unit via a network IP interface)
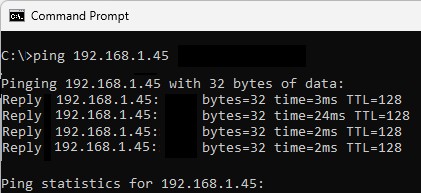
Preparation
-
First make sure there is a valid network connection between the Qinsy computer and the sonar unit, e.g with a ping command using the Windows command prompt:
-
Check also the computer's firewall settings not blocking the IP address.
Controller
-
When the Controller starts the driver will automatically try to make a network connection with the sonar unit.
-
Use the Controller's System I/O Reset option to reset the network connection: this will try to (re)connect again.
Try this option when the network connection failed during startup. -
When successfully connected, the driver will automatically request every update rate for a new ping (full sonar image).
Playback Mode
(Training/Testing: simulating the Qinsy Forward Looking sonar flow without being connected to a real unit)
Data will be read from a earlier recorded sonar file using Blueview raw '*.son' format.
Preparation
-
Make sure that file swimmer.son is located in sub folder x64 of the Qinsy program installation folder.
Please refer to paragraph Notes explaining how to playback a different sonar file.
Controller
-
When the Controller starts the driver will automatically playback the son file.
-
The driver will read at every update rate a new ping (full sonar image) from the file.
-
Use the Controller's System I/O Reset to stop the playback or start again at the next I/O Reset.
Displays
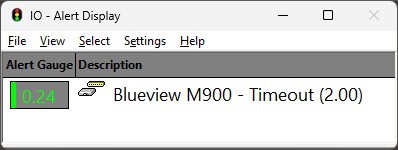
Alert Display
An Alert Display is useful to see if data is coming in regularly at the I/O port.
Therefore it should be the first display to check when going online.
Observation Physics Display
An Observation Physics Display is also useful to monitor if incoming imaging data is decoded successfully and at what update rate.
Further use the additional columns to monitor some meta data values that comes with the decoded imaging data.
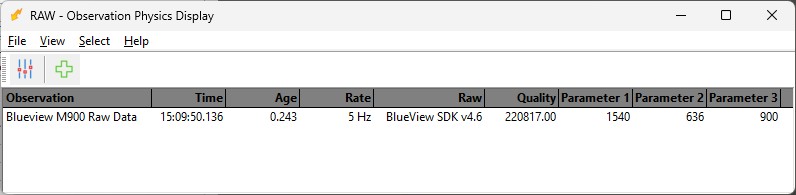
Columns
-
Raw
A text label with the manufacturer’s SDK version being used -
Quality
The size in bytes for the entire ping image update -
Parameter 1
The current sound velocity used by the sonar -
Parameter 2
Incrementing ping number -
Parameter 3
Always a fixed value of 900
Raw Multibeam Display
Use this display to visualize the imaging data.
Make sure to select the correct system in the System’s Selection dialog.
Use the View Properties dialog to change some specific Forward Looking Sonar settings:
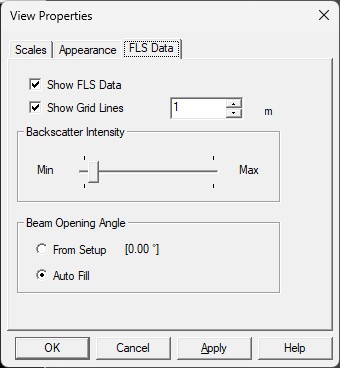
Note that settings from the other tab panels have no effect when using a forward looking sonar system.
Notes
Click to expand...
Advanced Notes
-
Driver executable is a 64bit program and should be located, inclusive all required assemblies (DLL's), in dedicated sub folder x64 of the Qinsy Program installation folder.
-
For Playback mode this sub folder x64 should also contain Blueview’s recorded raw sonar file *.son (proprietary format).
The driver will use file ‘swimmer.son’ by default for playback.
If you want to playback a different file you need to modify Drivers.io.json:
Locate this file in C:\Program Files (x86)\QPS\Qinsy\9.6.0\Drivers and open it with a text editor.
Find and replace “swimmer.son” with the your son filename: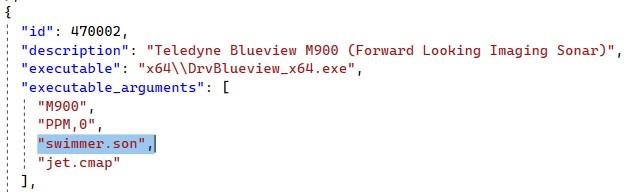
-
Optionally this sub folder x64 should also contain one or more Blueview’s colormap files *.cmap (proprietary format), e.g. cool.cmap, hot.cmap and/or jet.cmap.
Colormap files are only needed when storing the imaging data as ppm pictures to your harddrive.
See the next note for more information about this optional feature. -
Ping images can be stored automatically to a so-called portable pixmap graphics file (*.ppm) format in your current project's Graphics sub folder. This works both in Online as in Playback mode.
In order to create automatically images you need to modify the number in executable argument "PPM,n" in Drivers.io.json. This number will tell how often you want store an image:
Locate the Drivers.io.json file in C:\Program Files (x86)\QPS\Qinsy\9.6.0\Drivers and open it it with a text editor
For example 10 means save an image every 10th ping, 1 means at every ping and 0 means no saving at all.
Note that:
-
For viewing these images you need to use an image viewer that supports the ppm image format (e.g. IrfanView).
-
Filename convention for these images will be jjj_hhmmss.xy.cmap.nnnn.ppm, where jjj is the julian day, hhmmss the ping UTC time, xy the image type, cmap the name of the used colormap file and nnnn an incrementing counter.
-
Saving images may take a lot of disk space.
-