Description
The underlying design of Qinsy does not allow, for example, using different gyros and motion reference units, for different computations on the same object. Nor is it possible to use a gyro system defined on one object to orient a second object when the second object is restrained to have the same heading as the first object.
As a remedy the System Cloner driver is used to duplicate certain system types without the need to physically split their interface channel (e.g. serial port). Essentially the driver copies the observation information from the original driver and makes it available to the rest of the system as if it was a separate observation.
These systems currently support cloning:
-
Position Navigation
-
Gyro's and Compasses
-
Motion Reference sensors
-
Bundle compasses
-
Bundle Depth sensors
Examples of its use:
-
Where one object moves in a vertical direction, but not horizontal, with respect to a second object, as in the case of a fall pipe vessel. Both objects have the same heading so use the System Cloner to copy the gyro on Object 1 to Object 2.
-
The drag head on a trailing arm hopper dredge usually has the same heading as the lower suction pipe, which normally has its own orientation system. Cloning the orientation system for the suction pipe to the drag-head provides orientation to the drag-head.
-
Where a towed object has the same heading as the towing object, clone the gyro from the towing object to the towed object.
-
In automotive laser scanning where you want to establish the drift of an INS system versus a GNSS system, create two objects. Clone the gyro and motion reference unit from one object to the other and set up two computations, one using INS positions the other using GNSS, but both using the same heading, pitch and roll.
-
Where you want to use different gyros in different computations, add an extra object in your template database and then use the system cloner to put the same systems on that object. Then in the computation setup you can use a different gyro, because it’s a different object.
-
In a Bundle Tow operation for cloning compasses/depth sensors on a bundle.
Driver Information
|
Driver |
System Cloner |
Interface Type |
|
Driver Class Type |
|
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
DrvSystemCloner.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Decoding Notes
In the database setup phase you select the system that you want to clone and define observations as usual.
In order for the System Cloner driver to choose the correct observation from the selected driver you should however give the observation connected to the System Cloner driver the same slot number/name as the original observation.
Besides the slot number the observation types of the original observation and the cloned observation also need to match.
Database Setup
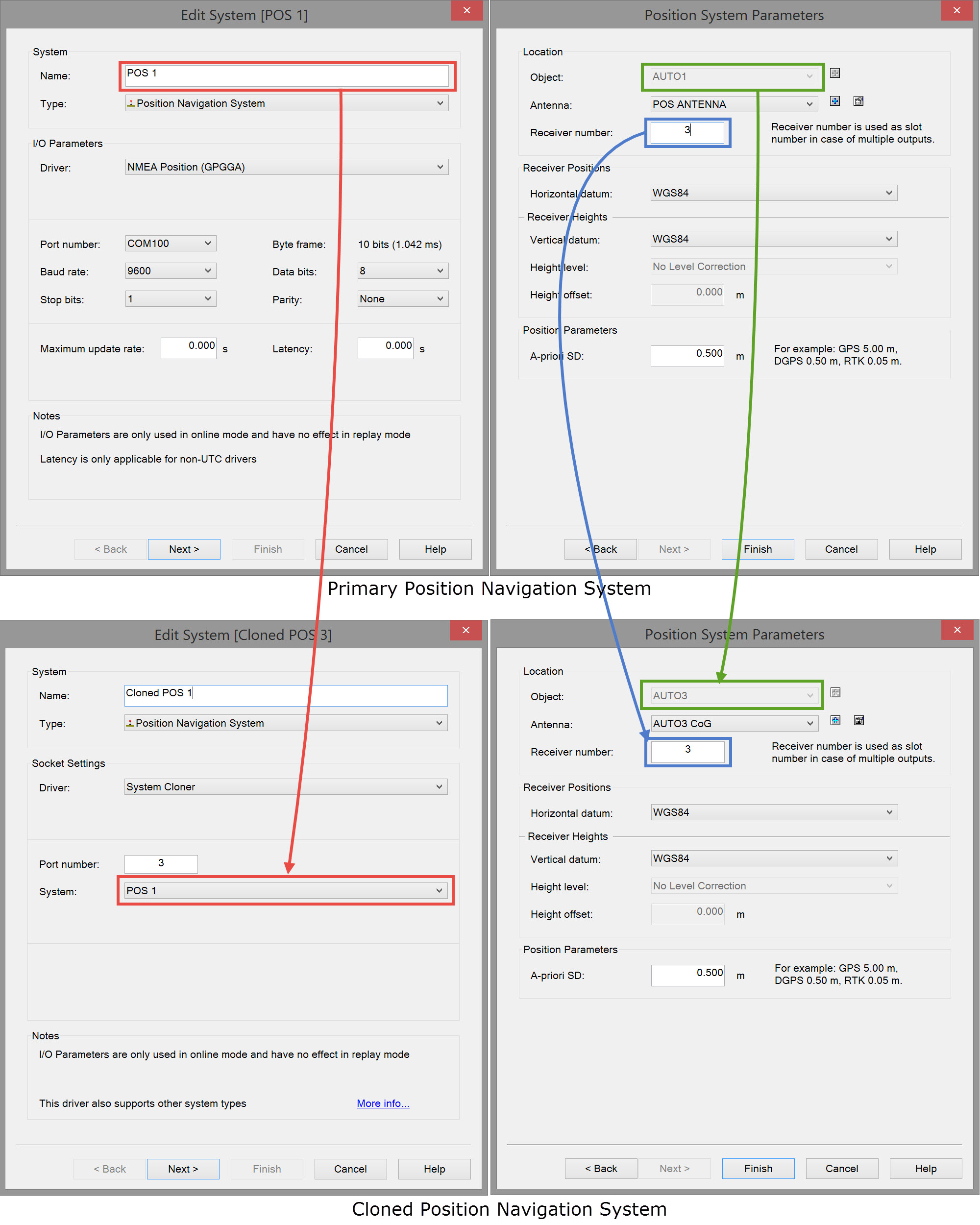
Position Navigation system
In this example the primary driver 'Pos 1' is defined on object 'Auto1' with a Slot/Receiver number '3'.
The cloned system clones 'Pos 1' and is defined on object 'Auto3' with exactly the same slot number, i.e. '3'.
|
System Wizard Page 1
|
|
|---|---|
|
System - Name |
Enter a name for the cloned system. |
|
System - Type |
Select the cloned system sensor type. This must be the same as the original primary system type. |
|
Socket Settings - Driver |
Select the System Cloner driver. |
|
Port Number |
Enter a unique number for each cloned system. |
|
System |
Select the sensor system from which the cloned system will take its observation values.
|
|
System Wizard Page 2
|
|
|---|---|
|
Object |
Select the object for which the cloned observation is applicable (normally different from the object associated with the primary observation). |
|
Node |
Select the node for which the cloned observation is applicable. |
|
Receiver/Slot Number |
Enter the first slot number making it identical to the slot number used by the primary observation.
|
|
Receiver Positions |
Enter values as normal. |
|
Position Parameters |
Enter values as normal. |
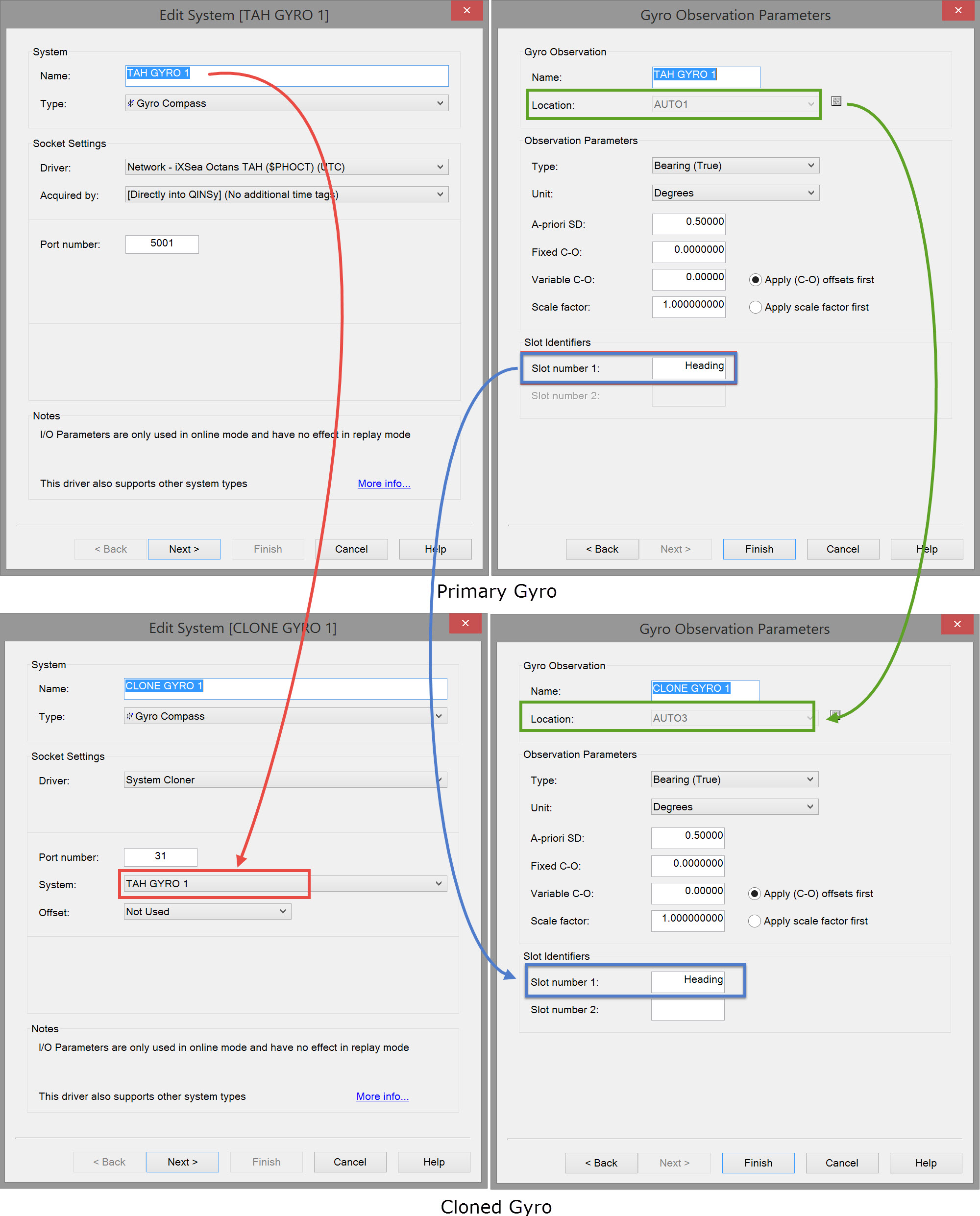
Gyro Compass
In this example the primary driver 'TAH Gyro 1' is defined on object 'Auto1' with a slot number 'Heading'.
The cloned gyro clones 'TAH Gyro 1' and is defined on object 'Auto3' with exactly the same slot number, i.e. 'Heading'.
|
System Wizard Page 1
|
|
|---|---|
|
System - Name |
Enter a name for the cloned system. |
|
System - Type |
Select the cloned system sensor type. This must be the same as the original primary system type. |
|
Socket Settings - Driver |
Select the System Cloner driver. |
|
Port Number |
Enter a unique number for each cloned system. |
|
System |
Select the sensor system from which the cloned system will take its observation values.
|
|
Offset |
The observation values copied from the primary sensor system can be modified by using an offset value.
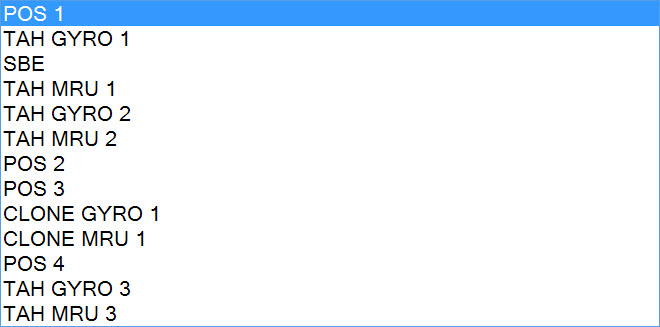
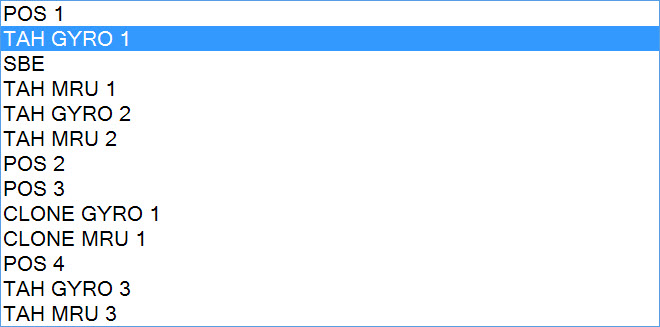
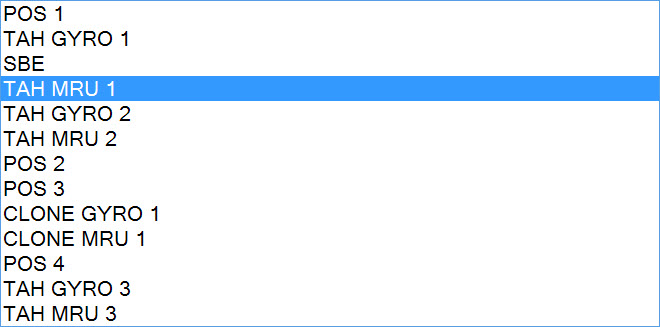
All the sensor systems defined to date in the template database are listed. In the example these are:
|
|
System Wizard Page 2
|
|
|---|---|
|
Observation - Name |
Enter a name for the cloned observation. |
|
Observation - Location |
Select the object for which the cloned observation is applicable (normally different from the object associated with the primary observation). |
|
Observation Parameters |
Enter all the observation parameters as normal. |
|
Slot Number 1 |
Enter the first slot number making it identical to the slot number used by the primary observation.
|
|
Slot Number 2 |
If applicable, enter the second slot number making it identical to the second slot number used by the primary observation.
|
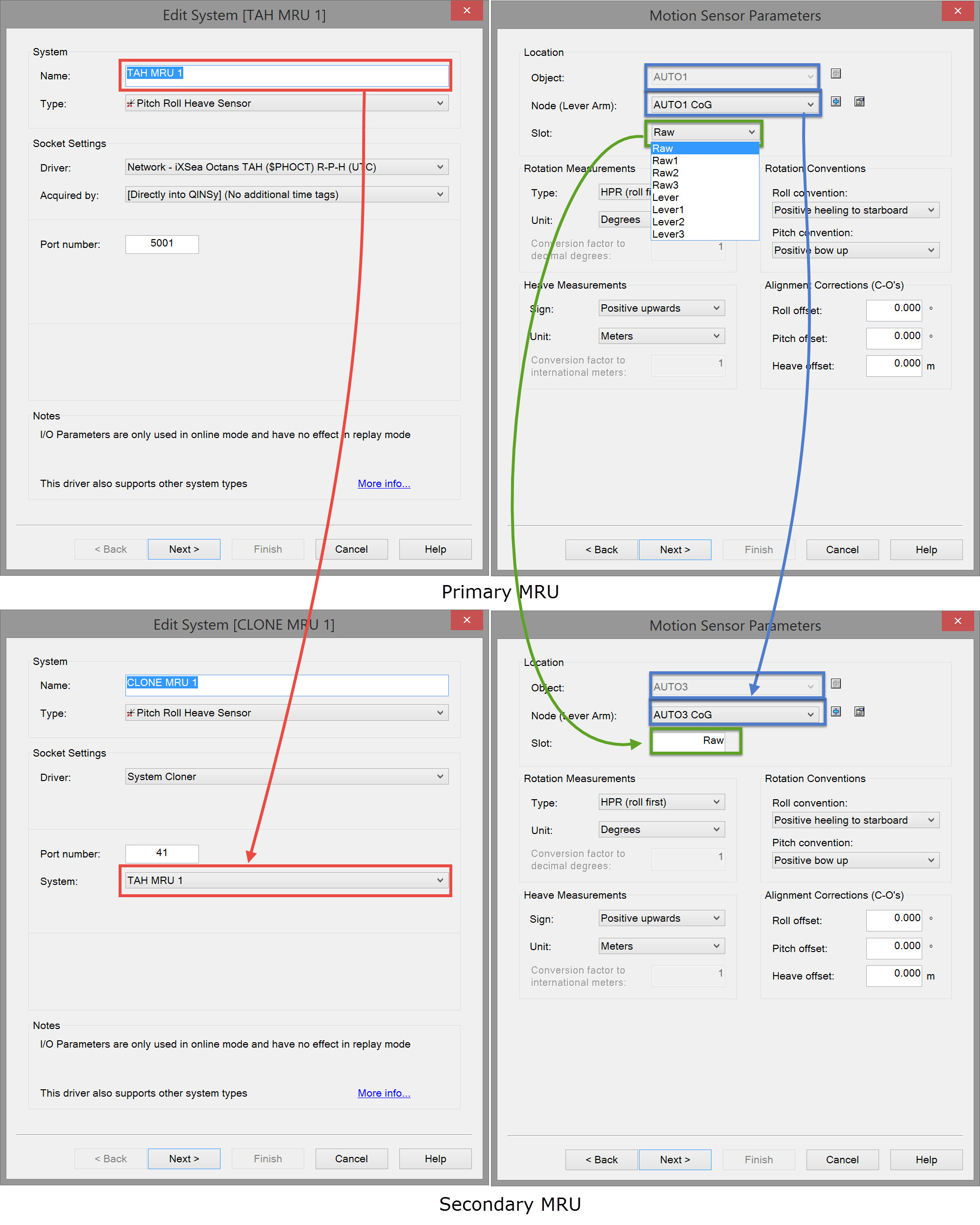
Motion Reference Unit
In this example the primary driver 'TAH MRU 1' is defined on object 'Auto1' with a slot number 'Raw'.
The cloned gyro clones 'TAH MRU 1' and is defined on object 'Auto3' with exactly the same slot number, i.e. 'Raw'.
|
System Wizard Page 1
|
|
|---|---|
|
System - Name |
Enter a name for the cloned system. |
|
System - Node |
Select the node for which the cloned system is applicable. |
|
System - Type |
Select the cloned system sensor type. This must be the same as the original primary system type. |
|
Socket Settings - Driver |
Select the System Cloner driver. |
|
Port Number |
Enter a unique number for each cloned system. |
|
System |
Select the sensor system from which the cloned system will take its observation values.
|
|
System Wizard Page 2
|
|
|---|---|
|
Observation - Name |
Enter a name for the cloned observation. |
|
Observation - Location |
Select the object for which the cloned observation is applicable (normally different from the object associated with the primary observation). |
|
Observation Parameters |
Enter all the observation parameters as normal. |
|
Slot Number |
Enter the slot number making it identical to the slot number used by the primary observation.
|
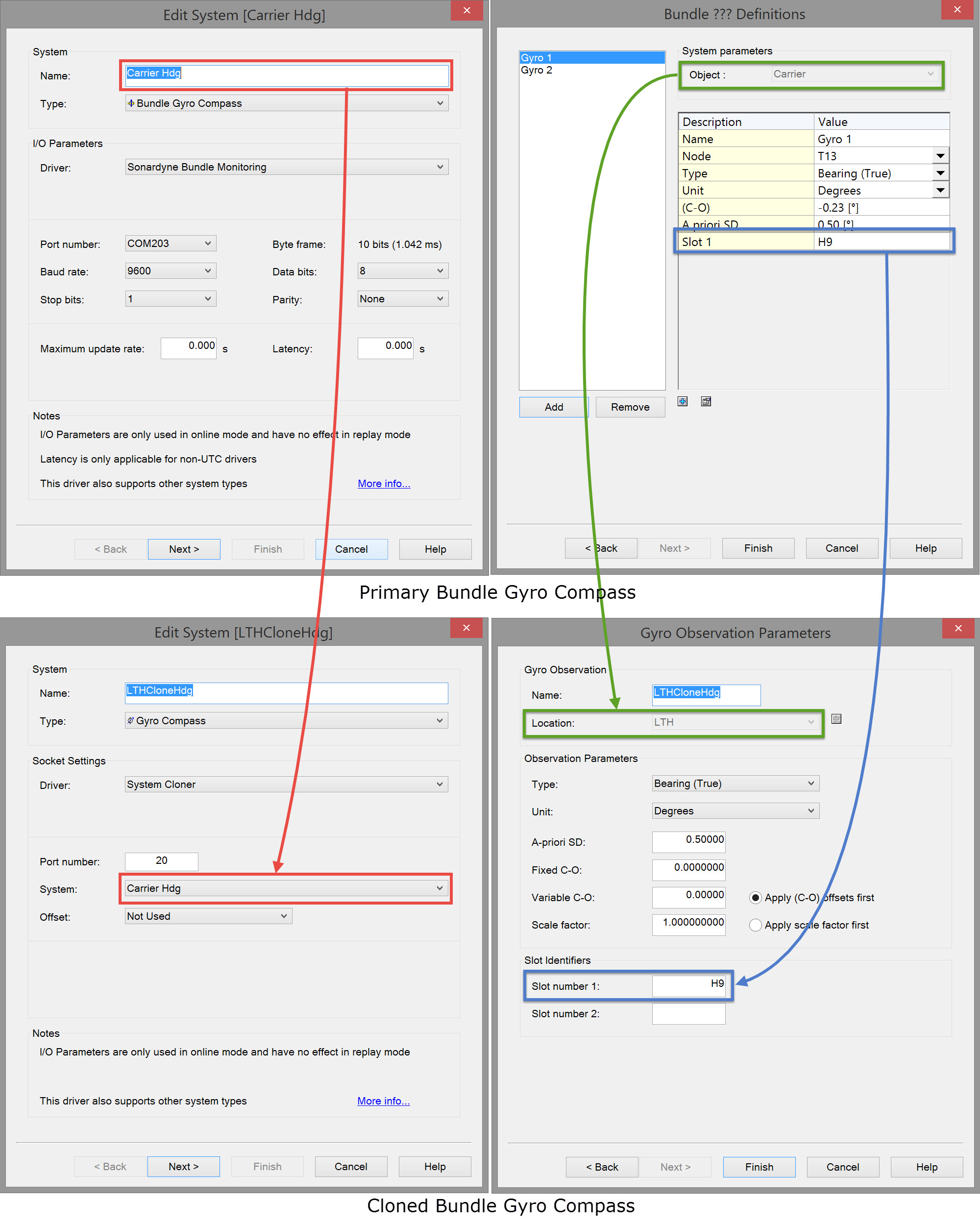
Bundle Gyro Compass
In this example the primary driver 'Carrier Hdg' is defined on object 'Carrier' with a slot number 'H9'.
The cloned gyro clones 'Carrier Hdg' and is defined on object 'LTH' with a slot number also 'H9'.
Note a second cloned system can be defined for Gyro 2 which has a slot number 'H10' in this example. The location of the second cloned system may be on some other object than 'LTH'.
|
System Wizard Page 1
|
|
|---|---|
|
System - Name |
Enter a name for the cloned system. |
|
System - Type |
Select the cloned system sensor type. This needs to be the same as the original primary system type. |
|
Socket Settings - Driver |
Select the System Cloner driver. |
|
Port Number |
Enter a unique number for each cloned system. |
|
System |
Select the sensor system from which the cloned system will take its observation values.
|
|
Offset |
The observation values copied from the primary sensor system can be modified by using an offset value.
All the sensor systems defined to date in the template database are listed. In the example these are:
|
|
System Wizard Page 2
|
|
|---|---|
|
Observation - Name |
Enter a name for the cloned observation. |
|
Observation - Location |
Select the object for which the cloned observation is applicable (normally different from the object associated with the primary observation). |
|
Observation Parameters |
Enter all the observation parameters as normal. |
|
Slot Number 1 |
Enter the first slot number making it identical to the slot number used by the primary observation.
|
|
Slot Number 2 |
If applicable, enter the second slot number making it identical to the second slot number used by the primary observation.
|
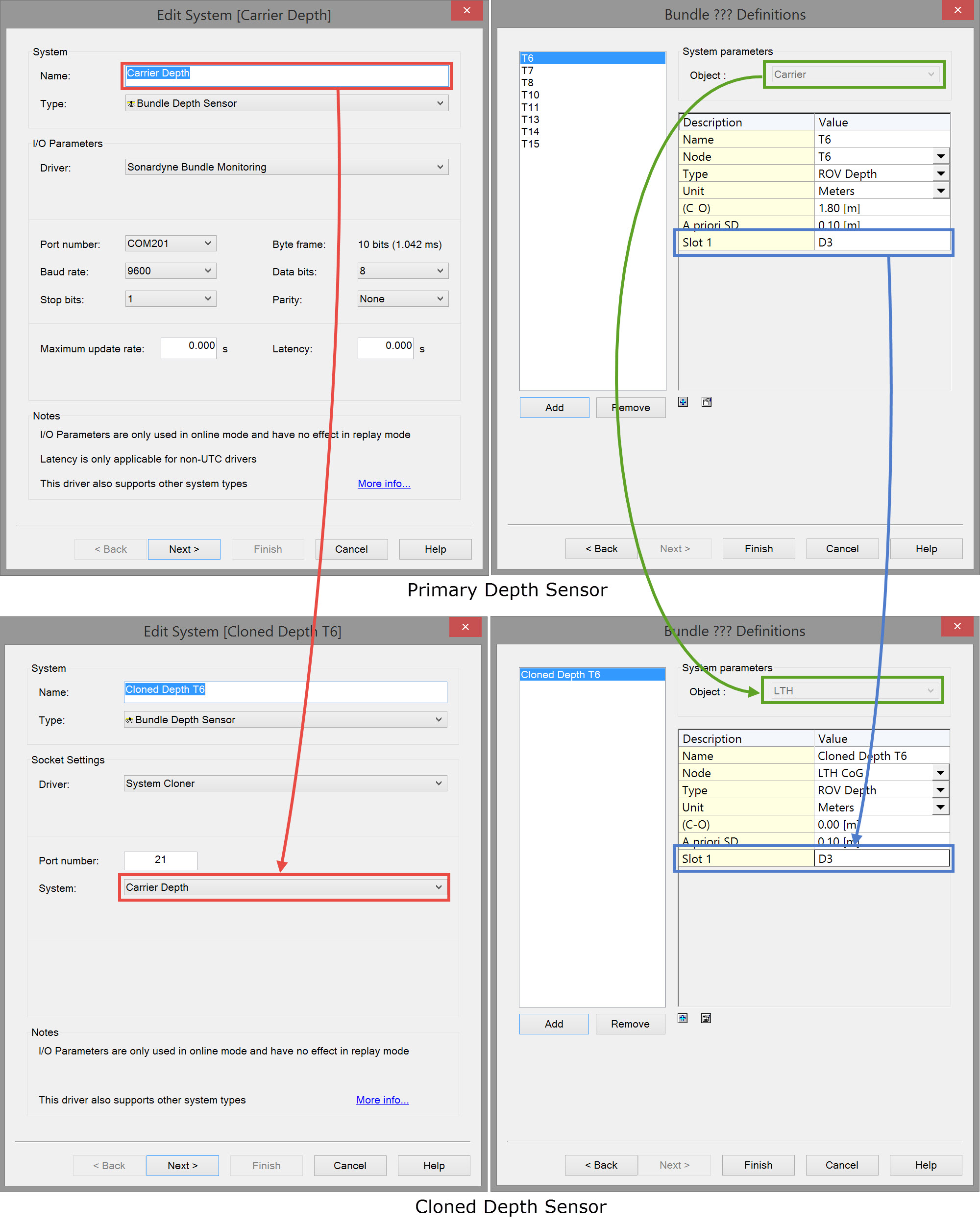
Bundle Depth Sensor
In this example the primary driver 'Carrier Depth' is defined on object 'Carrier' with a slot number 'D3'.
The cloned gyro clones 'Cloned Depth T6' and is defined on object 'LTH' with a slot number also 'D3'.
|
System Wizard Page 1
|
|
|---|---|
|
System - Name |
Enter a name for the cloned system. |
|
System - Type |
Select the cloned system sensor type. This needs to be the same as the original primary system type. |
|
Socket Settings - Driver |
Select the System Cloner driver. |
|
Port Number |
Enter a unique number for each cloned system. |
|
System |
Select the sensor system from which the cloned system will take its observation values.
|
|
System Wizard Page 2
|
|
|---|---|
|
Object |
Select the object for which the cloned observation is applicable, normally different from the object associated with the primary observation. |
|
Observation - Name |
Use the Add button to add an observation (ROV Depth) and enter a name for the cloned observation in the table to the right. |
|
Observation - Node |
Select the node for which the cloned system is applicable. |
|
Observation - Type |
For this cloned system type the observation is always an ROV Depth. |
|
Observation Parameters |
Enter all the observation parameters as normal. |
|
Slot Number 1 |
Enter the first slot number making it identical to the slot number used by the primary observation.
|
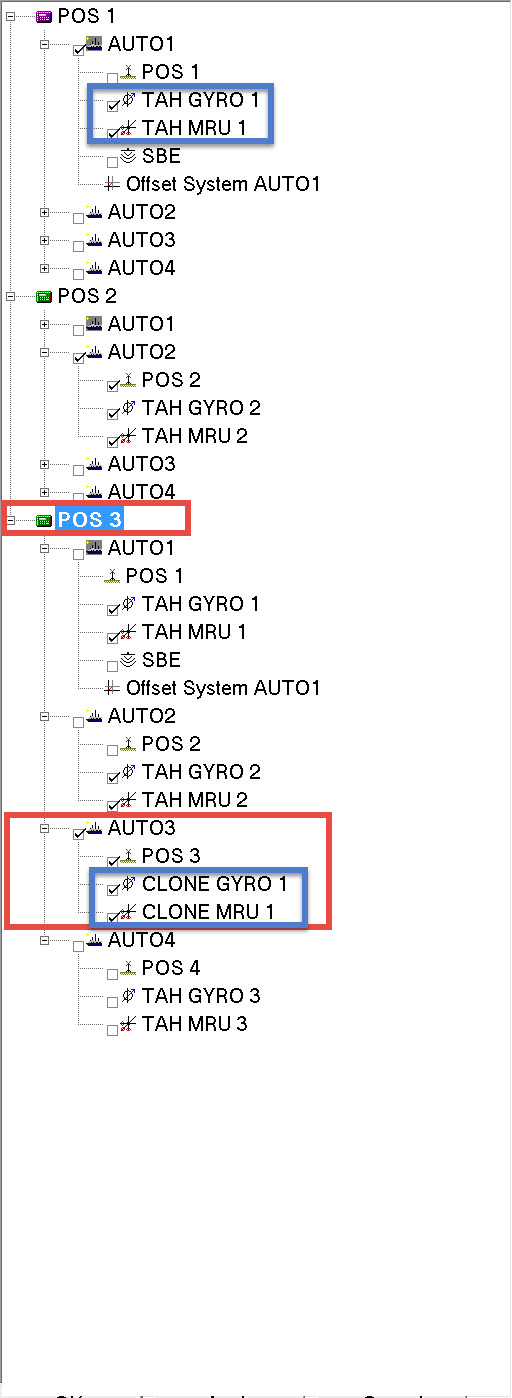
Online
Cloned systems are listed in the Computations dialog window just like any other system. In the example, systems 'TAH Gyro 1' and TAH MRU 1' have been cloned for use in the 'POS 3' computation.
Note that the primary systems need to be enabled in order that the cloned systems receive values.