
Description
Driver to decode single sound velocity values from a Smart SV Sensor (Applied Microsystems Ltd.).
Such a sensor is normally mounted close to a multibeam transducer head and the values can be used to correct for beamsteering.
Typically installation is seen together with a Simrad EM3000 multibeam configuration.
Driver will detect automatically whether the data is comma separated (ASCII format) or space separated (AML format).
Driver will also detect automatically whether the sound velocity value in the datastring is preceeded with a pressure value.
If the interfacing is only a one-way, the sensor must already output data continuously, in the so-called Real-mode. In case of two-way cabling, the driver will sent certain commands in order to receive data in Real-mode:
At startup, or when I/O is reset, a wake-up command in order to activate the sensor. Then the command 'REAL' is sent, followed by the 'MON' command.
This latter command will set the sensor to output data continuously. These commands are repeated until data is actually received in Real-mode.
Do NOT use this system to obtain sound velocities to create profiles, which should be used by single or multibeam echosounders.
In order to do that, see chapter about Sound Velocity Profile System Drivers.
Use this system to monitor the value coming from a sound velocity sensor, e.g. by using a Observation Physics or Timeplot display, or use this system to correct the beam angles for some multibeam systems, which do not take a sound velocity directly in their system.
Driver Information
|
Driver |
Sound Velocity - Smart SV (AML¸ ASCII) (Active) |
Interface Type |
Serial |
Driver Class Type |
Terminated |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input (two-way) |
Executable |
DrvSoundVelocity.exe ACT |
|
|
Related Systems |
|||||
|
Related Pages |
|
||||
Qinsy Config
Database Setup
First define a system of type "Underwater Sensor", and select the driver "Sound Velocity - Smart SV (AML, ASCII) (Active)". Set the maximum update rate to 1 seconds.
On the next tab-page, add an observation of type "Sound Velocity".
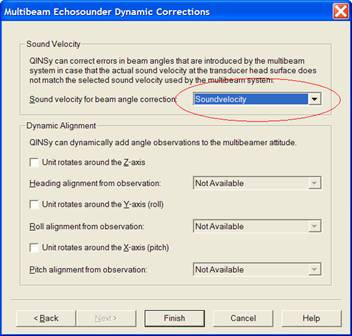
When the values from the sensor are used to correct for beam angle steering at the multibeam head(s), go to the multibeam system properties and select on the last tab-page this new observation:
Qinsy Online
Online
The sound velocity value can be monitored using an Observation Physics or Timeplot display.
One may also compare the sound velocity with the value from the currently used sound velocity profile:
Select an Alert display and add a 'Raw Data' Alert and select type 'Comparison with SVP'.
Set the upper limit to define the maximum allowed difference between the two values.
This is e.g. useful to decide to take a new SVP before continuing with your survey.
