Description
In order to help the Simrad DP control the vessel position as good as possible Qinsy will transmit cable forces on a separate port using this driver and the position of the grab ROV reference node.
Driver Information
|
Driver |
Simrad DP Force Output |
Interface Type |
|
Driver Class Type |
Terminated <LF> |
|---|---|---|---|---|---|
|
|
Input / Output |
Output |
Executable |
DrvOutSimradDPForce.exe |
|
|
Related Systems |
|||||
|
Related Pages |
|
||||
Decoding Notes
No decoding for the cable forces direct output from generic observation. No data conversions.
System Configuration
The Update Rate is user defined in the Database Setup program.
The observations should be selected in the corresponding combo boxes.
The output of the grab position is defined by choosing the computation and node of the grab ROV reference node.
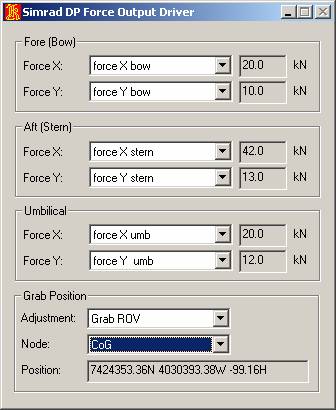
Online
The user interface of this driver: