Description
Driver to decode magnetometer observations, magnetic field and signal strength from Marine Magnetics SeaSPY/SeaLINK Magnetometer system, outputting in Standard Data Format (ASCII).
The passive driver will time stamp the data when it's received at the I/O port.
The active driver, "(With UTC) (1Hz)", will use the time from the datastring to time stamp the magnetic data. In order to have both systems (Qinsy and the SeaSPY) working in the same time frame.
The active driver will send a command to the magnetometer to set the current time. This command will be sent every time the Controller goes on-line, and every time the I/O will be reset in the Controller.
Further, the driver will also send a command, "3", to set the cycle update rate of the magnetometer to 1 reading per second (1Hz).
The command line parameter "3" may be changed to another number between 0 and 6, with the following meaning: 6 = 0.1Hz, 5 = 0.2Hz, 4 = 0 .333Hz, 3 = 1Hz, 2 = 2Hz, 1 = 4Hz.
Special value 0 means: Stop cycling.
The driver can decode the depth reading of the fish, coming from the pressure sensor.
In that case, define an Underwater Sensor System on the fish object, select the driver 'Depth – SeaSPY/SeaLINK Standard Format (x)', and add an ROV Depth observation.
Make sure that the value between brackets in the driver name is the same as the driver selected for this Magnetometer system.
Driver Information
|
Driver |
SeaSPY-SeaLINK Standard Format |
Interface Type |
Serial |
Driver Class Type |
Terminated |
|---|---|---|---|---|---|
|
Yes and No |
Input / Output |
Input and Output |
Executable |
DrvMagnetometer.exe STANDARD |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
System Interfacing
Interfacing Notes
When the active driver is selected (With UTC), it is important that the wiring of the cable is bi-directional, i.e. allows two-way data transfer, so that the Qinsy driver can send the command telegrams.
Qinsy Config
Database Setup
To decode the magnetometer field observation (nT) a Magnetometer system needs to be defined.
The quality factor (e.g. shown in the Observation Physics Display) is the actual signal strength of the reading.
The leak sensor output is also checked. It should always be zero. If the value is other than zero, the reading of the magnetic observation will be set hardcoded to --999.9.
One may define an Alert display that monitors this value.
It is important to get the unit immediately to the surface in case of any leakage!
Additional Info
Additional Information
Database Setup
Add manual echosounder
Please be aware that you need to add a Manual echosounder to your towed object to be able to process the track of the towed object.
Online / Replay
Since Qinsy version 8.10.2014.10.20:
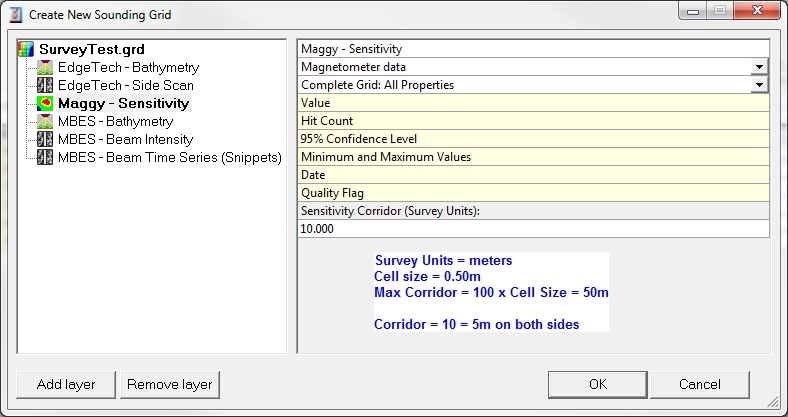
Storing magnetometer data to a sounding grid has the option to create a corridor perpendicular to the sailing direction. I.e. that the full path of the corridor is filled automatically with each single reading of the magnetometer.
To set this corridor width value, go to the layer properties in the Controller Session Setup, Storage, Sounding grid or use the Sounding Grid Utility, making sure that the layer type is 'Magnetometer data'.
The maximum width of the corridor is 100 times the minimum cell size of the sounding grid.