
Description
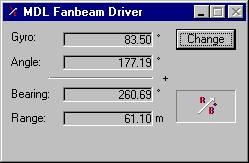
Driver with user-interface to decode range and angle from Renishaw Fanbeam Mk III System.
The calculated range will be a slant grid range.
Driver Information
|
Driver |
Renishaw Fanbeam MkIII Range & Bearing |
Interface Type |
Serial |
Driver Class Type |
Terminated |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
DrvFanbeamUI.exe |
|
|
Related Systems |
|||||
|
Related Pages |
|
||||
Database Setup
-
Surface Navigation System
-
Add a new "Surface Navigation System" to the database and select the appropriate Renishaw Fanbeam driver (Renishaw Standard ASCII or Simrad Binary)
-
Set the interfacing parameters. Press "Next" button to continue the setup.
-
Add the following observations to the Fanbeam system
-
Range
-
True bearing
-
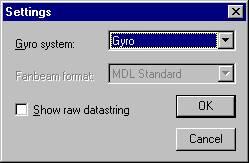
The user may select online in the driver's dialog a gyro system. The gyro reading will be added to the angle. Therefore a Range and a True Bearing will go into the Qinsy system.
-
-
Angle
-
If you add an Angle observation instead of a True Bearing, do not select online a gyro system in the driver's dialog.
-
-
-
The "At node" must be the Fanbeam Antenna, probably a variable node on the vessel's object. The "To" node must be the Fanbeam Prism, probably a fixed node.
-
The Slot Id number must match the target number in the raw datastring, e.g. "01". If there is no target id in the datastring, e.g. Simrad Binary Format, the Slot Id must be 01.
-
Press the "Next" button to define the observation properties. Select each observation and set the appropriate unit and (C-O) values.
Make sure to press button "Apply Properties" to save the changes. Press "Finish" to save the system.
-
-
Underwater Sensor System
Qinsy needs an extra observation to be able to compute a 3D position. This third position could be generated by a manual entered ROV depth.-
Add a new "Underwater Sensor System" and
-
select the driver "Manual - Underwater Sensor Input" ,
-
as type select ROV Depth at a node.
-
Online
The driver's dialog will appear in the Windows taskbar when online.
Computation Setup
In the Computation Setup set the iteration threshold to 99 or higher so the value of the observation will not be taken into account.
Drivers IO Notes
Three command line options are available to select the format: SIMRAD, ARTEMIS or MKII.
If no format is specified, then the driver assumes Renishaw Standard ASCII format.