
Description
Driver that decodes both binned and raw bathymetry data, sidescan data and pitch and roll from a Ping DSP 3DSS-DX-450 Sonar using a TCP network connection.
In addition it decodes NMEA or TSS1 roll, pitch, heave, position and heading if available from external sensors connected to the device.
Output type: Sidescan 3D points and Bathymetry points
The driver can decode both types of bathymetry data points that are recorded by the PingDSP 3DSS sonar system:
-
"Sidescan 3D" points are the unfiltered data points.
-
"Bathymetry" points are the result of bottom track filtering and binning of these "Sidescan3D" points.
Please refer to the PingDSP 3DSS-DX Sonar Manual for more information on the methods and parameters of smoothing, filtering and binning.
Driver Information
|
Driver |
Ping DSP 3DSS-DX-450 |
Interface Type |
TCP |
Driver Class Type |
TCP Client |
|---|---|---|---|---|---|
|
Yes |
Input / Output |
Input |
Executable |
DrvQPSCountedTCP.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Decoding Notes
The Ping DSP 3DSS-DX-450 system forwards NMEA and/or TSS1 strings to Qinsy. The data is time stamped by the unit upon reception. The driver supports the following strings:
|
GGA, RMC, GGK |
Position |
|
HDT |
Heading |
|
VNYCM (internal sensors) |
Roll, Pitch |
|
ZDA |
Time |
|
TSS1 |
Roll, Pitch, Heave |
Timing
The PingDSP 3DSS software time stamps each message. If the message itself has both a time and a date, this time and date are used as the observation time.
If the message does not contain a time and/or date, time and/or date from the PingDSP 3DSS time stamp are used for the observation time.
Example
String containing NMEA GGA message and PingDSP 3DSS timestamp as received by the driver:
"<PingDSP 3DSS date><PingDSP 3DSS time>$–GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx".
The observation time recorded in Qinsy is: <PingDSP 3DSS date>, at hour: hh, minute: mm, ss.ss seconds.
Since the NMEA GGA message does not contain a date, the PingDSP 3DSS date is used.
Interfacing Notes
Unknown Attachment
Interfacing
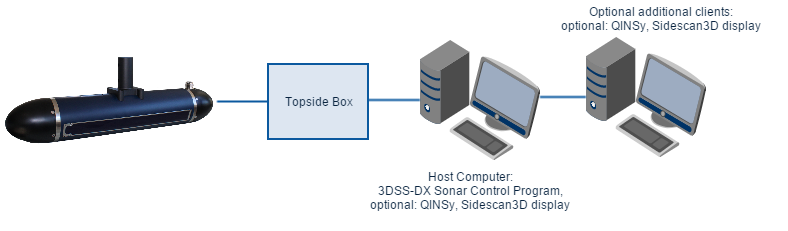
The driver should always be connected to the IP of the "Host" computer, the one that runs 3DSS-DX Sonar Control software.
The port is always 23848.
Database Setup
Multibeam System
Add a new Multibeam system, select driver "Ping DSP 3DSS-DX-450 Bathymetry Starboard" for the starboard side.
Add another Multibeam system using driver "Ping DSP 3DSS-DX-450 Bathymetry Port" for the port side of the sonar system.
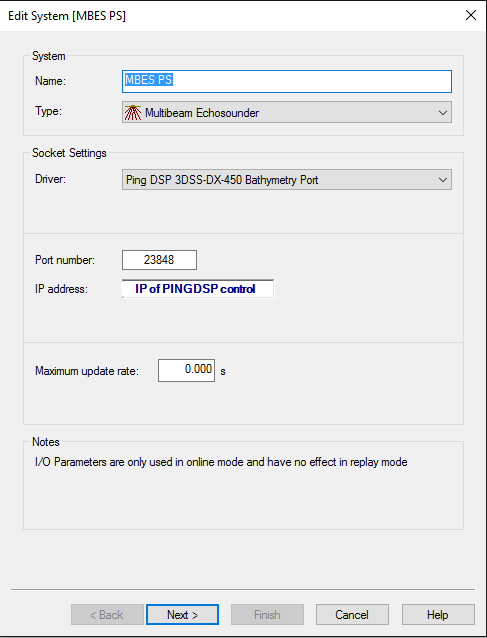
Qinsy: Database Setup, Multibeam Echosounder
Alternatively, the raw unbinned "Sidescan 3D" data can be read instead of the binned "Bathymetry" data.
In that case, select the "Ping DSP 3DSS-DX-450 SideScan3D Starboard" and "Ping DSP 3DSS-DX-450 SideScan3D Port" drivers.
Sidescan 3D points and Bathymetry points
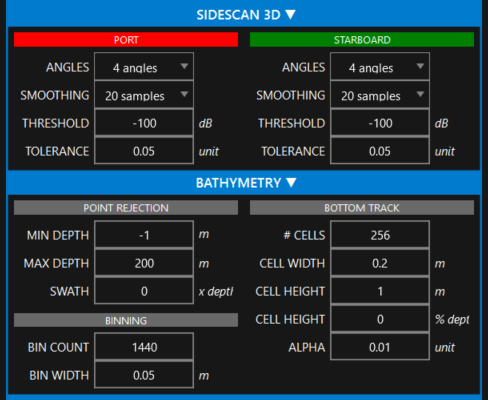
PingDSP 3DSS control: "Sidescan 3D" smoothing and "Bathymetry" filtering and binning settings
The settings for smoothing of the "3D Sidescan" points are set on the PingDSP 3DSS control panel in the "Sidescan 3D" section as pictured above.
After this smoothing, the "Sidescan 3D" points are binned and filtered resulting in the "Bathymetry" data. The settings for this binning and filtering can be found in the "Bathymetry" section of the PingDSP 3DSS control software.
This means in particular that any settings in the "Bathymetry" section on this control do not have any effect on the data decoded by the drivers when the selected drivers are of the type "Sidescan 3D".
Note that both "Sidescan 3D" and "Bathymetry" data point types are multibeam system points, the difference is that the "Bathymetry" points are filtered and binned by the PingDSP 3DSS software while the "Sidescan 3D" points are not.
On the next page, set the Roll offset to 70° for the port side and -70° for the starboard side.
The maximum number of beams per ping should be set to 10000.
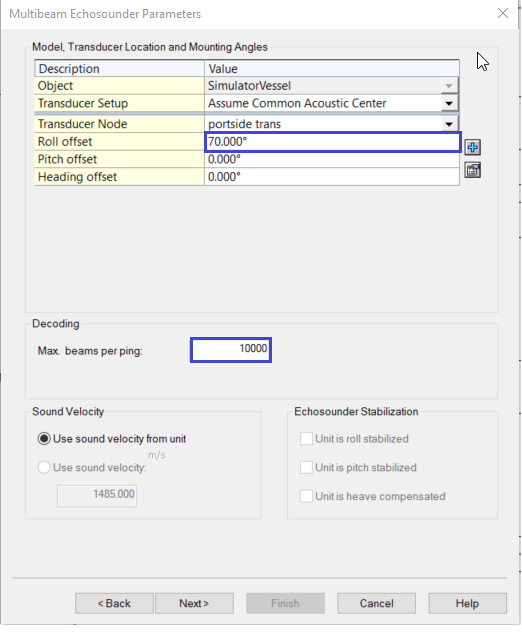
Qinsy: Roll offset = 70° on port side; Roll offset = -70° on starboard side
Pitch Roll Heave Sensor
Select driver "Ping DSP 3DSS-DX-450 (R-P-H)" to decode the pitch, roll and (if available) heave. The type of message (TSS1 or NMEA VNYCM) must be entered as slot.
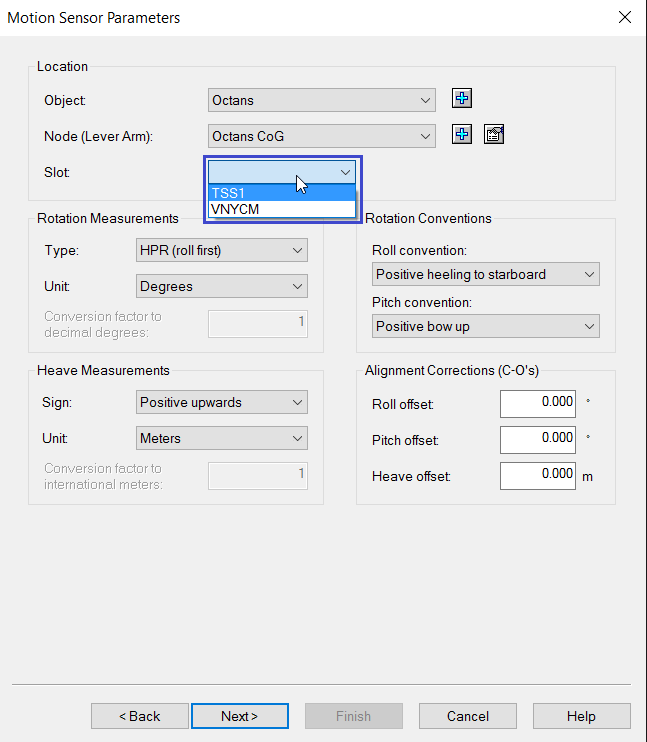
Qinsy: select the type of message to decode the motion as a slot
Position Navigation system
Select driver "Ping DSP 3DSS-DX-450 Position" to decode position. The type of message (NMEA GGA, RMC or GGK) for position must be entered as slot.
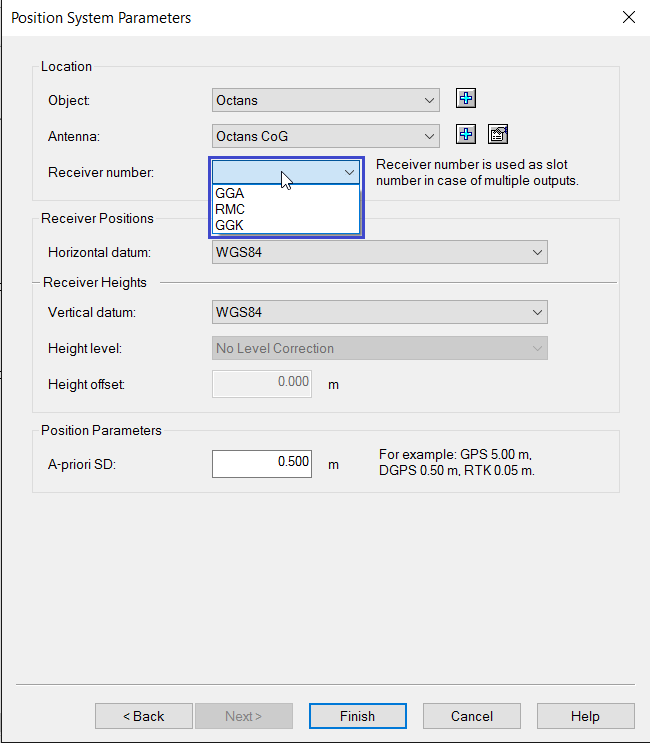
Qinsy: select the type of message to decode the position as a slot
Heading
Select driver "Ping DSP 3DSS-DX-450 Heading" to decode the HDT NMEA messages. The slot number must be left blank.
Sidescan Sonar
Select driver "Ping DSP 3DSS-DX-450" to decode the sidescan sonar. Add channels with slot ID 0 and orientation Port for the port side and slot ID 1 and orientation Starboard for the starboard side.
Time Synchronization System
Select driver "Ping DSP 3DSS-DX-450 Timetag" to decode the NMEA ZDA time stamp messages. Read more about timing in Qinsy in the Drivers Manual Time Synchronization System and in the Qinsy Knowledge Base How-to Timing in Qinsy and How-to Time Synchronization Display.
Online
Decoding
A fixed procedure is required in order to decode the data from the Ping DSP 3DSS-DX Sonar control software:
First go online with Qinsy before the Ping DSP 3DSS-DX Sonar control software is started with transmitting data.