
Description
This driver will decode current speed/direction information from a Nortek Vessel Mounted Current Profiler (VMCP).

A VMCP measures the current profile underneath your vessel, and outputs for each depth 'cell' the speed and direction of the current.
An average current speed and direction are calculated for the entire profile.
Typical application for the average current speed and direction would be to use it on a dredging vessel, when dumping rock material from the water surface onto the seabed, in order to estimate the final dump location.
A VMCP unit is normally installed on a vessel in combination with Nortek's SurveyVM™ software, which is interfaced straight to the VMCP unit.
It collects raw velocity data, and if the software is also interfaced to the vessel's GPS and gyro, it may output velocity data corrected for vessel motion to third party software, like Qinsy.
Driver Information
|
Driver |
Nortek - Vessel Mounted Current Profiler |
Interface Type |
Serial |
Driver Class Type |
Terminated <ETX> or <CR><LF> |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
DrvQpsTerminated.exe |
|
|
Related Systems |
|||||
|
Related Pages |
|
||||
Decoding Notes
The time in the datastring (available in ASCII telegram) is ignored. This means that data will be timestamped whenever it arrives at the serial comport, using the computer's system or PPS time.
Values decoded from the ASCII data are internally converted to meters/sec, degrees and dBar. Values decoded from the NMEA sentences are converted to survey units/sec and degrees.
A possible checksum at the end of each NMEA sentence is ignored by the driver.
Interfacing Notes
Because the driver is interfaced to the SurveyVM™ software, and not directly to the VMCP unit, it does not need to send request commands in order to receive data.
So a one-way wiring interface cable would be sufficient.
Use the following wiring diagram for a one-way cable:
|
DB-25 |
Sensor |
or |
DB-9 |
Sensor |
|
DB-25 |
COM |
or |
DB-9 |
COM |
|---|---|---|---|---|---|---|---|---|---|---|
|
Pin 2 |
TXD |
|
Pin 3 |
TXD |
----- |
Pin 3 |
RXD |
|
Pin 2 |
RXD |
|
Pin 3 |
RXD |
|
Pin 2 |
RXD |
X |
Pin 2 |
TXD |
|
Pin 3 |
TXD |
|
Pin 7 |
SG |
|
Pin 5 |
SG |
----- |
Pin 7 |
SG |
|
Pin 5 |
SG |
Default baud rate will be 9600-8-1-none, but it is strongly recommended to increase the baud rate when outputting the ASCII Standard or Extended format, due to the vast amount of bytes sent per profile.
Database Setup
-
In order to decode the average current speed and direction, add a Miscellaneous System to your template database and select driver "Nortek - Vessel Mounted Current Profiler (ASCII)" or "Nortek - Vessel Mounted Current Profiler (NMEA)".
On the second wizard page, add two observations, name one e.g. "CURRENT SPEED", and the other e.g. "CURRENT DIR".
The important part is assigning the correct Slot 1:
Slot 1 name for the average speed should be, in capitals, "SPD AVG".
Slot 1 name for the average direction should be, in capitals, "DIR AVG".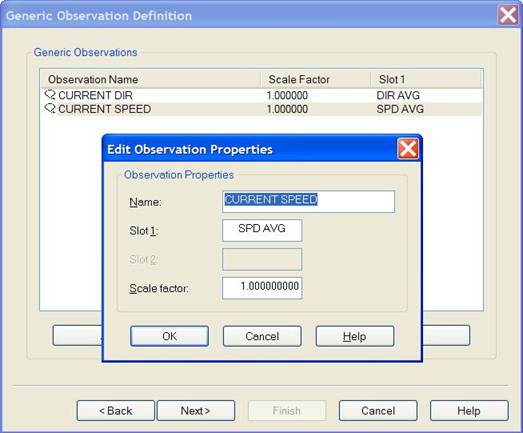
Notice that when the NMEA driver is selected, the average speed and direction are decoded directly from the VDR sentence (other sentences are ignored).
No formulas are applied, except for converting knots to survey units/sec.
The observations quality indicator (as seen in the Observation Physics Display) will be zero.
When the ASCII driver is used, the average speed and direction are calculated using the mean for all corrected Veast and Vnorth values of all depth cells.
The observation's quality indicator (as seen in the Observation Physics Display) will be the standard deviation of the mean value for each depth cell. -
The VMCP can also be used for "bottom tracking", to obtain the vessel's ground speed (SOG) and course over ground (COG).
These two observations can be used to enhance the Kalman filter of the Computation Setup.
In that case the VCMP should be instructed to output the NMEA VTG sentence.
In order to decode the speed- and course over ground, add a Speed Log System to your template database and select driver "Nortek - Vessel Mounted Current Profiler (NMEA)".
On the second wizard page, add a 'Bearing (True)' observation, and add a 'Speed' observation. -
The important part is assigning the correct Slot 1:
Slot 1 name for the speed observation must be, in capitals, "SPD VTG".
Slot 1 name for the bearing observation should be, in capitals, "DIR VTG".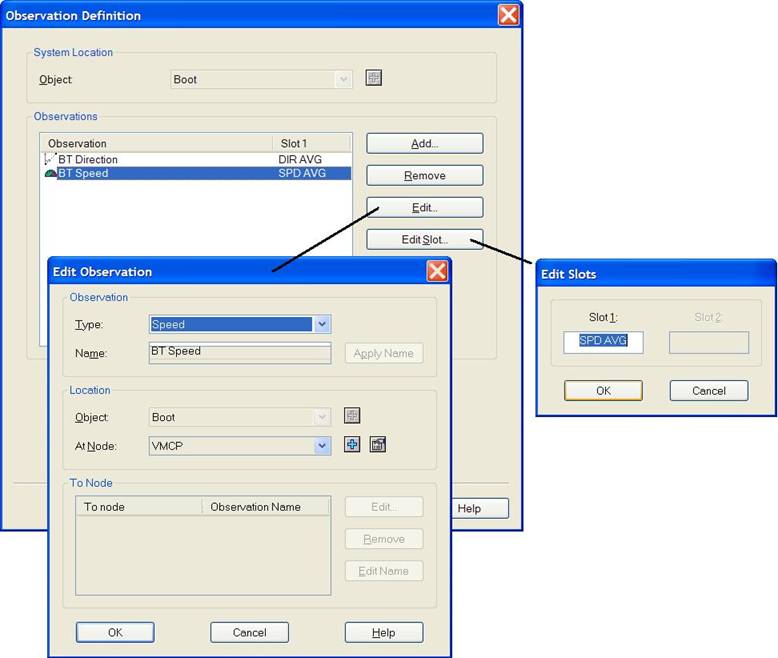
Slot Id Summary
|
Output Format |
Decoding |
System |
Driver |
Observation Type |
Slot 1 Name |
Comment |
|---|---|---|---|---|---|---|
|
ASCII |
Average current speed |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
SPD AVG |
Calculated from mean for all corrected Veast and Vnorth values of all depth cells [in m/sec] |
|
ASCII |
Average current direction |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
DIR AVG |
Calculated from mean for all corrected Veast and Vnorth values of all depth cells [in deg] |
|
|
|
|
|
|
|
|
|
NMEA $--VDR |
Average current speed |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (NMEA) |
Generic |
SPD AVG |
VDR Field 6 (CurrentSpeedKnots) is used and converted to [survey units /sec] |
|
NMEA $--VDR |
Average current direction |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (NMEA) |
Generic |
DIR AVG |
VDR Field 2 (DirectionTrue) is used [deg] |
|
|
|
|
|
|
|
|
|
ASCII |
Mean Heading |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
HEADING |
Field 1 of Header Line 3 is used, and converted to [deg] |
|
ASCII |
Mean Pitch |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
PITCH |
Field 2 of Header Line 3 is used, and converted to [deg] |
|
ASCII |
Mean Roll |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
ROLL |
Field 3 of Header Line 3 is used, and converted to [deg] |
|
ASCII |
Mean Temperature |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
TEMP |
Field 4 of Header Line 3 is used, and converted to [deg °C] |
|
ASCII |
Mean Pressure |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
PRESSURE |
Field 5 of Header Line 3 is used, and converted to [dBar] |
|
|
|
|
|
|
|
|
|
ASCII |
Range Beam 1 |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
RNG BEAM1 |
Field 4 of Header Line 5 is used, and converted to [survey units] |
|
ASCII |
Range Beam 2 |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
RNG BEAM2 |
Field 5 of Header Line 5 is used, and converted to [survey units] |
|
ASCII |
Range Beam 3 |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
RNG BEAM3 |
Field 6 of Header Line 5 is used, and converted to [survey units] |
|
ASCII |
Quality Beam 1 |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
QTY BEAM1 |
Field 7 of Header Line 5 is used |
|
ASCII |
Quality Beam 2 |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
QTY BEAM2 |
Field 7 of Header Line 5 is used |
|
ASCII |
Quality Beam 3 |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
QTY BEAM3 |
Field 7 of Header Line 5 is used |
|
|
|
|
|
|
|
|
|
NMEA $--VHW |
Ship's along speed through water |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (NMEA) |
Generic |
SPD VHW |
VHW Field 6 (SpeedKnots) is used and converted to [survey units /sec] |
|
NMEA $--VHW |
Ship's gyro heading |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (NMEA) |
Generic |
DIR VHW |
VHW Field 2 (Heading) is used [deg] |
|
NMEA $--VTG |
Ship's speed over ground |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (NMEA) |
Generic |
SPD VTG |
VTG Field 7 (SpeedKnots) is used and converted to [survey units /sec] |
|
NMEA $--VTG |
Ship's course over ground |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (NMEA) |
Generic |
DIR VTG |
VHW Field 2 (GroundCourse) is used [deg] |
|
NMEA $--VDR |
Corrected current speed |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (NMEA) |
Generic |
SPD VDR |
VDR Field 6 (CurrentSpeedKnots) is used and converted to [survey units /sec] |
|
NMEA $--VDR |
Corrected current direction |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (NMEA) |
Generic |
DIR VDR |
VDR Field 2 (DirectionTrue) is used [deg] |
|
|
|
|
|
|
|
|
|
NMEA $--VTG |
Ship's speed over ground |
Speed Log |
Nortek - Vessel Mounted Current Profiler (NMEA) |
Speed |
SPD VTG |
VTG Field 7 (SpeedKnots) is used and converted to [survey units /sec] |
|
NMEA $--VTG |
Ship's course over ground |
Speed Log |
Nortek - Vessel Mounted Current Profiler (NMEA) |
Bearing (True) |
DIR VTG |
VHW Field 2 (GroundCourse) is used [deg] |
|
|
|
|
|
|
|
|
|
ASCII |
Current speed for individual depth cell 1 |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
SPD 1 |
Speed in [m/sec], calculated from corrected Veast and Vnorth for the first Depth Cell |
|
ASCII |
Current direction for individual depth cell 1 |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
DIR 1 |
Direction in [deg], calculated from corrected Veast and Vnorth for the first Depth Cell |
|
ASCII |
Current speed for individual depth cell 2 |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
SPD 2 |
Speed in [m/sec], calculated from corrected Veast and Vnorth for the 2nd Depth Cell |
|
ASCII |
Current direction for individual depth cell 2 |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
DIR 2 |
Direction in [deg], calculated from corrected Veast and Vnorth for the 2nd Depth Cell |
|
... |
... |
... |
... |
... |
... |
... |
|
ASCII |
Current speed for individual depth cell 'n' |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
SPD n |
Speed in [m/sec], calculated from corrected Veast and Vnorth for the nth Depth Cell |
|
ASCII |
Current direction for individual depth cell number 'n' |
Miscellaneous |
Nortek - Vessel Mounted Current Profiler (ASCII) |
Generic |
DIR n |
Direction in [deg], calculated from corrected Veast and Vnorth for the nth Depth Cell |
Additional Information
References: Nortek AS publications .