Description
This driver has user-interface and behaves like a normal position navigation system driver which decodes NMEA GGA and GST messages from a GPS Receiver.
However, the driver is also capable of outputting the incoming GGA and GST message via the same serial COMport.
The outputted messages are by default exactly the same as the incoming messages, but may be a) modified, and/or b) delayed:
|
a) |
Modifications will take place when certain conditions of the incoming data have failed. These conditions are user-defined.
|
|
b) |
The delayed output means that incoming messages can be outputted certain updates later. The number of updates is also a user-defined setting. |
Driver Information
|
Driver |
NMEA GGA GST (Conditional Output) |
Interface Type |
Serial |
Driver Class Type |
Terminated |
|---|---|---|---|---|---|
|
Yes |
Input / Output |
Input |
Executable |
DrvQPSTerminatedUI.exe MOD_OUTPUT PPS |
|
|
Related Systems |
|||||
|
Related Pages |
|
||||
Interfacing Notes
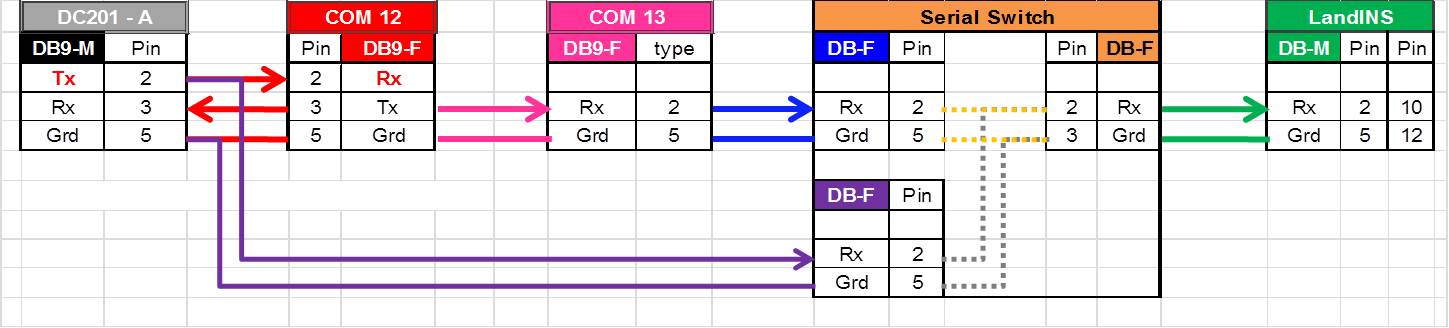
Output will take place via the same serial COMport as the incoming messages, therefore one should take the following wiring diagram into account when using I/O cables and connectors:
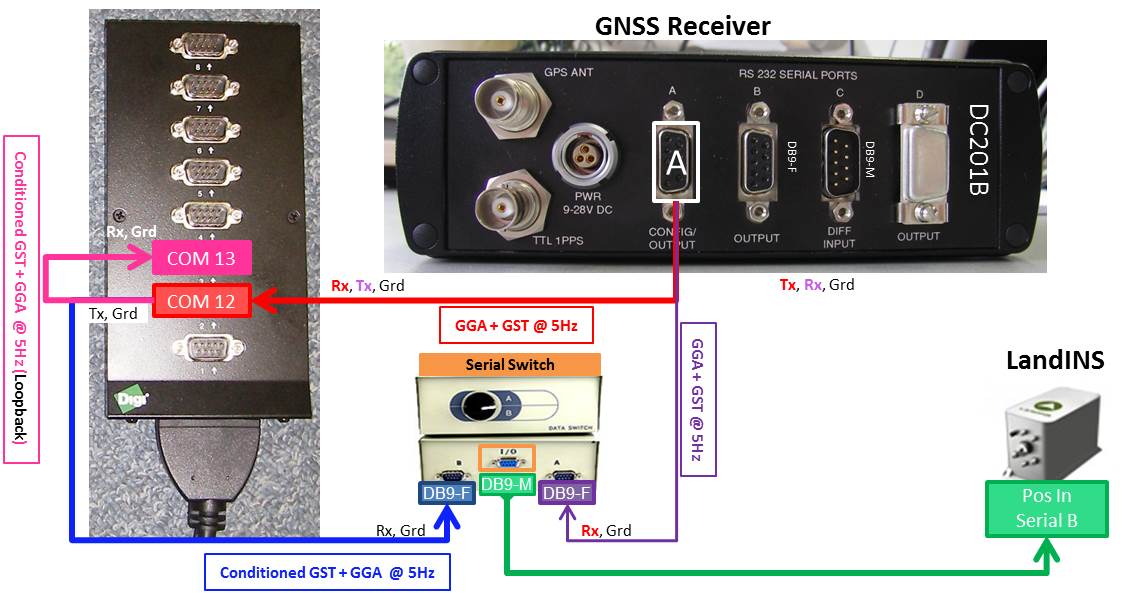
The Serial Switch is used to feed the INS with Positioning data when Qinsy is not Online. This to prevent large drifts in the INS solution.

Database Setup
Add a Position Navigation System, and select the "NMEA GGA GST (Conditional Output)" driver from the list.
The position is handled as any other normal position navigation system driver, and will be stored in the database during recording.
The (modified) outputted position is handled as any other output position driver, and is not stored in the database.
To store this position, one should use a loopback cable (from current serial COMport to another free one), and add another Position Navigation System.
Select driver "POS M/V (NMEA GGA GST GSA and Heading" in order to decode the message.
Online
The driver has user-interface, and therefore will always be present in the Windows taskbar.
When going on-line for the first time, locate the driver, and change the Setup and Conditions parameters
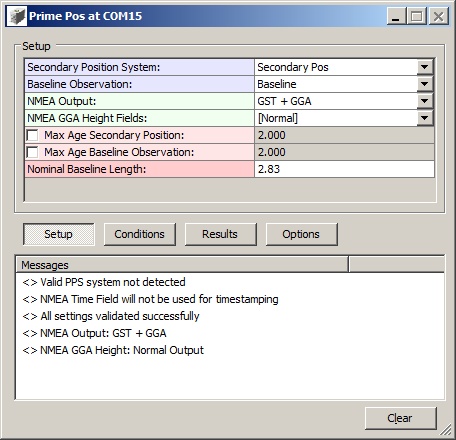
Driver Layout Menu: Setup
|
Secondary Position System: |
Select your secondary system (NavPos) from the list. It will be used to collect the GPS Mode and is needed by the 'GPS Mode' Condition (see below). |
|
Baseline Observation: |
Select from the available generic observations the one that represents the baseline observation.
|
|
NMEA Output: |
|
|
NMEA GGA Height Fields: |
|
|
Max Age Secondary Position: |
Checked: The output will be modified when the last received secondary position time is older than the maximum allowed age (default: 2 sec). Unchecked: this condition will not be used. |
|
Max Age Baseline Observation: |
Checked: The output will be modified when the last received baseline observation time is older than the maximum allowed age (default: 2 sec). Unchecked: this condition will not be used. |
|
Nominal Baseline Length: |
Enter the measured distance between the two GPS antennas.
|
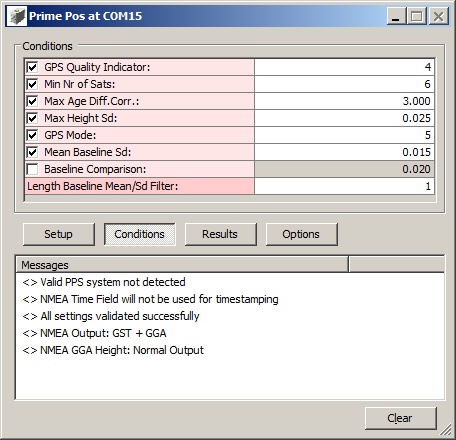
Driver Layout Menu: Conditions
|
GPS Quality Indicator: |
Checked: the output will be modified when the GPS Quality Indicator of the incoming GGA message is different from the given value (default set to 4, i.e. RTK Fixed).
|
|
Min Nr of Sats: |
Checked: the output will be modified when the number of used satellites of the incoming GGA message is less than the given value (default set to 6).
|
|
Max Age Diff.Corr.: |
Checked: the output will be modified when the maximum age of differential corrections of the incoming GGA message exceeds the given value (default set to 3 sec).
|
|
Max Height Sd: |
Checked: the output will be modified when the standard deviation (1-sigma) of the altitude observation of the incoming GST message exceeds the given value (default set to 0.025 m).
|
|
GPS Mode: |
Checked: the output will be modified when the GPS Mode of the secondary position differs from the given value (default set to 5, i.e. Fixed, 'RR').
|
|
Mean Baseline Sd: |
Checked: the output will be modified when the standard deviation (1-sigma) of the baseline length filter exceeds the given value (default set to 0.015 m). This filter keeps track of the last n baseline length observations.
|
|
Baseline Comparison: |
Checked: the output will be modified when the (absolute) difference between the current baseline length and the nominal value exceeds the given value (default set to 0.020 m). The nominal value must be set under the Setup menu.
|
|
Length Baseline Mean/Sd Filter: |
Set the number of observations to use (last updates) by the baseline length filter (default 1, which also means that no standard deviation is calculated).
|
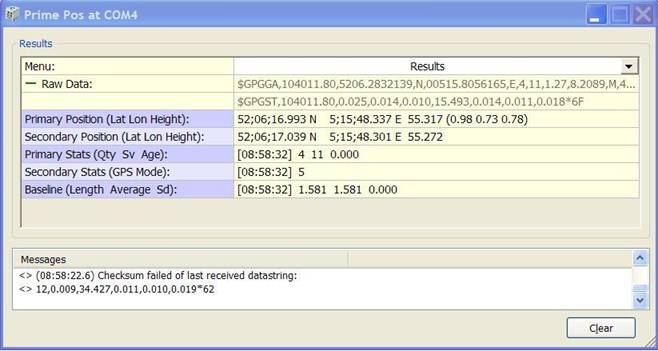
Driver Layout Menu: Results
|
Raw Data: |
The raw received ASCII data at the serial COMport. Notice that the indicator icon cycles when a complete message (GGA+GST) is received. |
|
Primary Position (Lat Lon Height): |
Latitude, longitude and height of the last received decoded position. (Notice that the used geographical format depends on the Controller's global settings).
|
|
Secondary Position (Lat Lon Height): |
Latitude, longitude and height of the last collected secondary position
|
|
Primary Stats: (Qty Sv Age): |
Time, GPS Quality Indicator, the Number of Used Satellites and the Age of Differential Corrections of the last decoded position (GGA) are displayed.
|
|
Secondary Stats (GPS Mode): |
Time and the GPS Mode value of the last collected secondary position.
|
|
Baseline (Length Average Sd): |
Time, the Baseline observation, the mean of the baseline length filter and the standard deviation (1-sigma) of the baseline length filter.
|
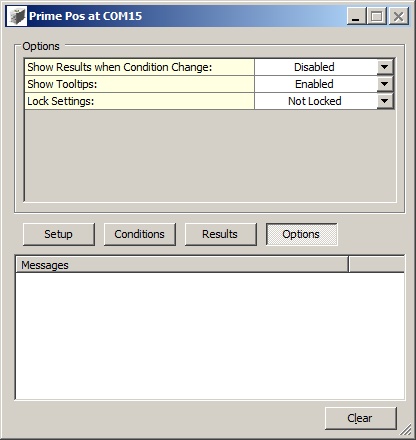
Driver Layout Menu: Options
|
Show Results when Condition Change: |
Every time when the user changes a condition parameter, the results menu will be invoked. Default disabled. |
|
Lock Settings: |
Enable to lock the user-interface settings of the Setup and Conditions menu, in order to prevent making changes by mistake.
|
|
Show Tooltips: |
When hovering the mouse over the left column rows, you will get some more information. Disable if this becomes annoying... |
[Clear] The last 500 history messages are displayed in the message view. Use the Clear button to empty the list.
Additional Information
Typical Application

iXBlue LANDINS / HYDRINS
An INS is a position & orientation system that provides position, heading, roll and pitch. It offers high-accuracy position and orientation data in real-time, and is resistant to GNSS drop-outs.
In order to optimize prediction during these drop-outs, it is important to feed the INS with as accurate and realistic position status information/standard deviations as possible. As not all GNSS systems process their measurements and present their results to a standardized method an INS normaly needs to be tweaked for each GNSS system. The particular tweak is hardware and firmware depending and therefore difficult to optimise with a GNSS that was just available for that particular project. This driver is intended to modify the GGA and GST output strings from a GNSS system to improve the aiding to the INS and was tested with the iXBlue LANDINS, but could be used for other INS systems that allow external GNSS systems.
So instead of receiving position information straight from an accurate GNSS receiver, it will receive the outputted messages from this driver.
The driver can delay the message by several updates, and is therefore capable of using present information about GPS behaviour to modify the data that has not been send yet to the INS.
So the LANDINS will be notified just in time about an upcoming GPS drop-out, and starts predicting, using its internal highly accurate orientation sensors.
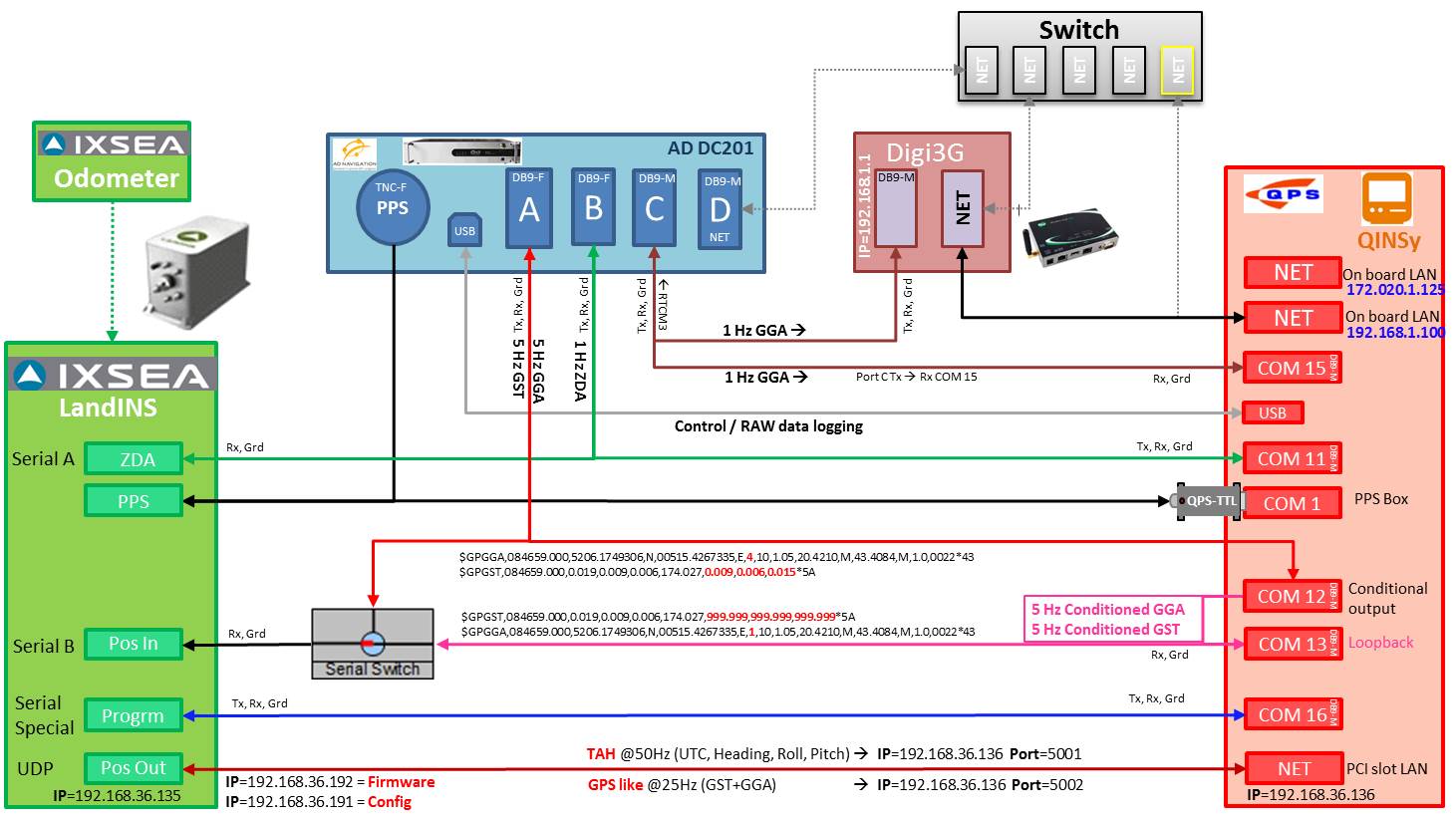
The above flowchart is how the driver was deployed in automotive solutions and marine solutions and can be used with any GNSS (port and connector genders can be different).
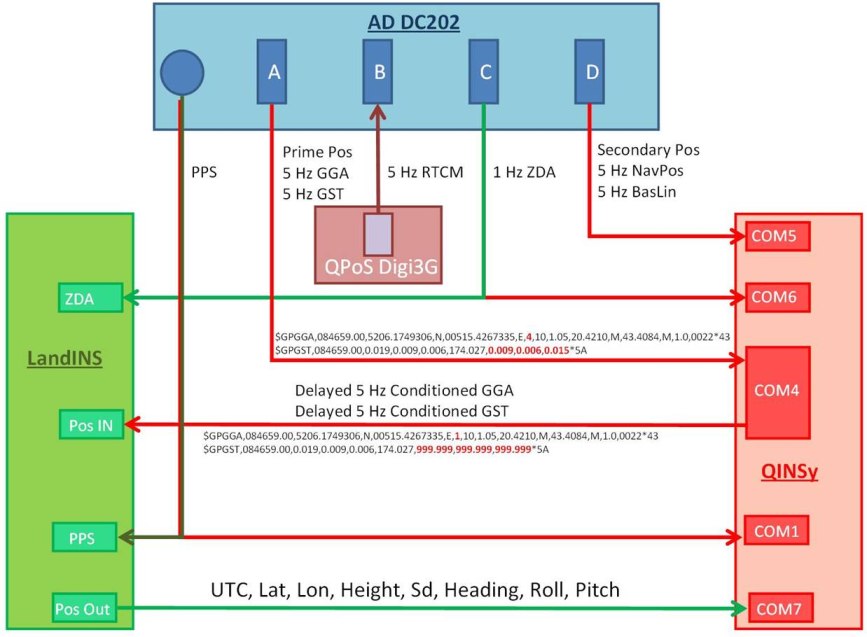
The (simplified) flowchart below is used in marine solutions i.c.w. AD Navigation DC202 GNSS receivers