Description
This driver decodes multiple message received from Seatools via a UDP interface.
The messages this driver decodes are:
-
ROV Position SROV
-
ROV Position MROV
-
Tether length and angles
-
Frame angles
-
Docking status and distances
-
Track offset
-
Umbilical information
All messages are received in ASCII and have an NMEA-like format.
Driver Information
|
Driver |
Network - Seatools (MROV - SROV) |
Interface Type |
UDP |
Driver Class Type |
Terminated |
|---|---|---|---|---|---|
|
Yes |
Input / Output |
Input |
Executable |
DrvQpsTerminatedUDP.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Database Setup
The various messages are decoded as the following system types:
|
Message type |
System type |
|---|---|
|
ROV Position MROV |
Position Navigation |
|
ROV Position SROV |
Position Navigation |
|
Tether length and angles |
USBL |
|
Frame angles |
Rotation Angle Sensor |
|
Docking status and distances |
USBL |
|
Track offset |
Miscellaneous |
|
Umbilical information |
Miscellaneous & Underwater Sensor |
|
Depth |
Underwater Sensor |
ROV Position MROV, SROV Setup
Create a database with a minimum of three object types to represent the vessel, MROV and SROV.
To decode the position select a Position navigation system on both the MROV and SROV.
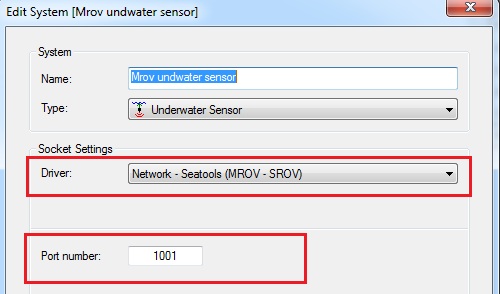
On the first wizard page select as driver 'Network - Seatools (MROV - SROV)'.
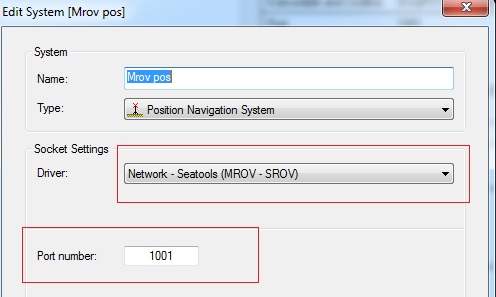
Enter the port number on which data is transmitted.
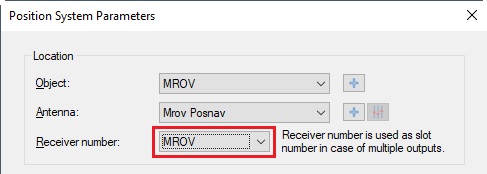
The Receiver number is used as slot number to uniquely identify each Position navigation system.
Tether length and angles Setup
To decode the tether arms select a USBL system.
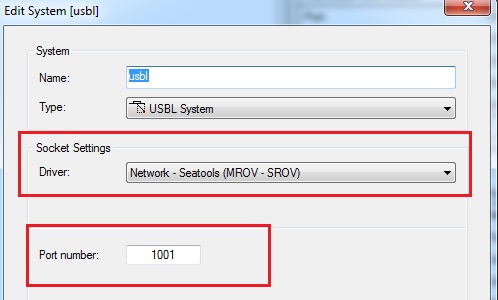
Verify that the correct driver is selected and that the port number is correct.
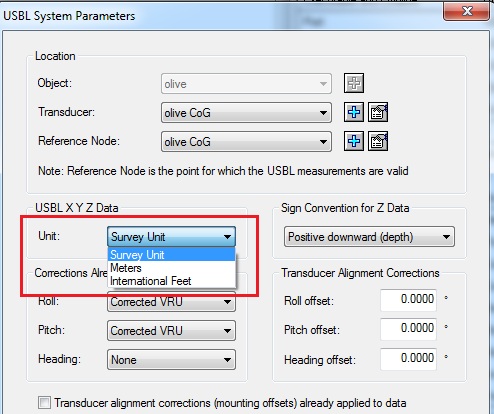
The values are received in meters, and recalculated to the survey unit of the database.
Make sure the unit on this wizard page is set to Meters.
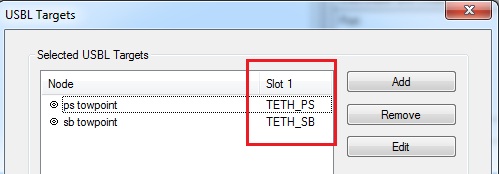
The slot id's to use are TETH_PS (tether arm port side) TETH_SB (tether arm starboard side).
Frame angles Setup
To decode the angular data select a Rotation Angle sensor.
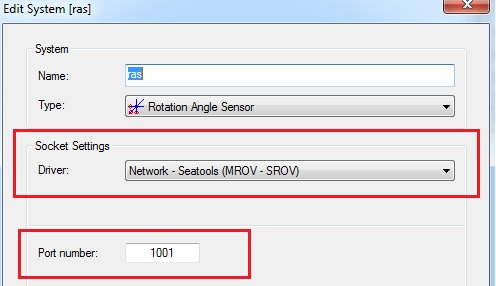
Verify driver and port number are correct.
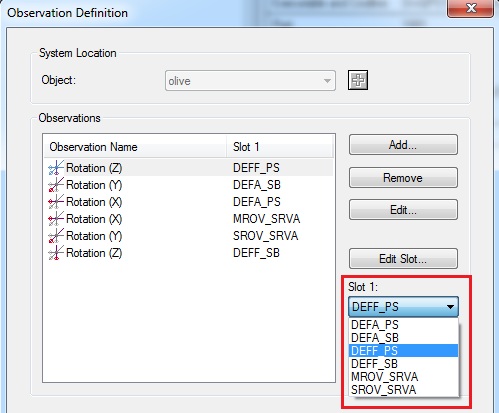
All slot id's are predefined.
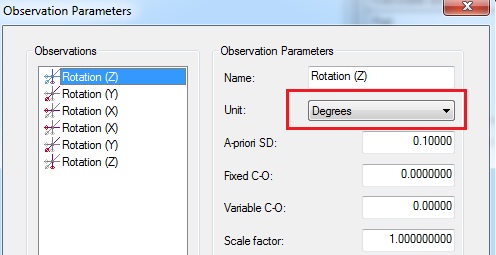
All values are received in degrees. Verify the unit is correct on this wizard page.
Docking status and distances
The docking status is decoded as a USBL sensor. Follow the steps described in 'Tether length and angles Setup'.
This observation is decoded as USBL Z.
The quality indicator is used to communicate the docking status (0 = undocked, 1 = docked).
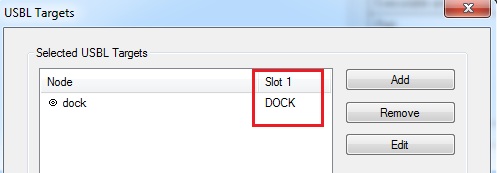
Use as slot id DOCK.
Track offset & Umbilical information Setup
These observations are decoded as a Miscellaneous system type.
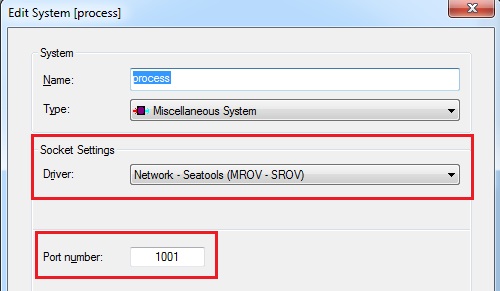
Verify driver and port number are correct.
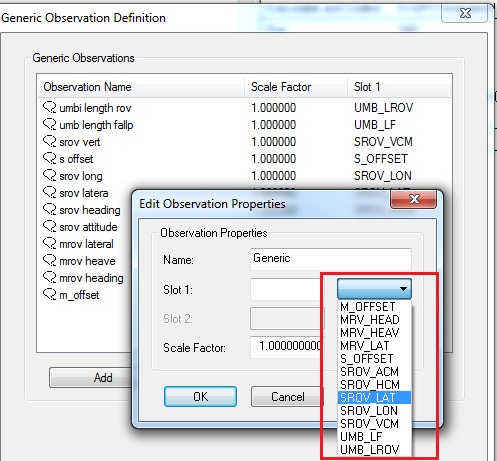
All slot id's are predefined.
Depth Setup
Select an underwater sensor to decode the depth.
Verify driver and port number are correct.
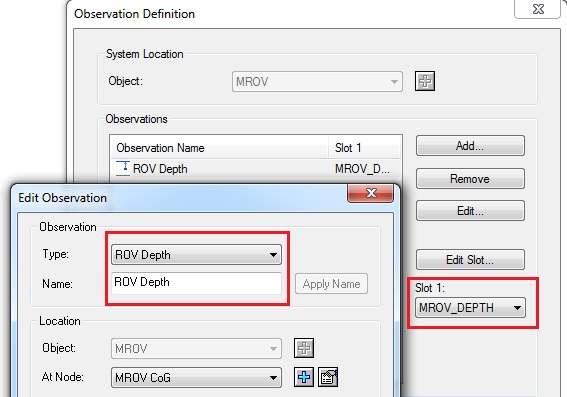
The slot id's are predefined for both MROV & SROV. Select ROV Depth as observation type.
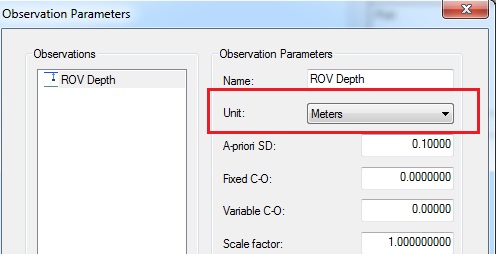
Values are received in meters and recalculated to the database survey units.
Verify the selected unit here is Meters.
Slot Id table
Below is a table that can be referred to to determine which slot id should be used to decode which observation.
|
Message |
System |
Observation |
Slot id |
Description |
|---|---|---|---|---|
|
ROV Position (MROV) |
Underwater sensor |
ROV Depth |
MROV_DEPTH |
Depth |
|
ROV Position (SROV) |
Underwater sensor |
ROV Depth |
SROV_DEPTH |
Depth |
|
ROV Position (MROV) |
Position Navigation System |
- |
MROV |
- |
|
ROV Position (SROV) |
Position Navigation System |
- |
SROV |
- |
|
Tether |
USBL |
- |
TETH_PS |
- |
|
- |
- |
- |
TETH_SB |
- |
|
Angles |
Rotation Angle Sensor |
Rotation XYZ |
MROV_SRVA |
Survey arm angle [degr] MROV |
|
- |
- |
Rotation XYZ |
SROV_SRVA |
Survey arm 2 angle [degr] SROV |
|
- |
- |
Rotation XYZ |
DEFA_SB |
Deflector arm angle SB |
|
- |
- |
Rotation XYZ |
DEFA_PS |
Deflector arm angle PS |
|
- |
- |
Rotation XYZ |
DEFF_SB |
Deflector flap angle SB |
|
- |
- |
Rotation XYZ |
DEFF_PS |
Deflector flap angle PS |
|
Dock |
USBL |
USBL Z |
DOCK |
Distance SROV/MROV |
|
Process |
Miscellaneous |
Generic |
M_OFFSET |
Track offset [m] MROV, starboard (+), port(-) |
|
- |
- |
Generic |
S_OFFSET |
Track offset [m] SROV, starboard (+), port(-) |
|
- |
- |
Generic |
MRV_HEAD |
MROV heading control mode |
|
- |
- |
Generic |
MRV_LAT |
MROV lateral control mode |
|
- |
- |
Generic |
MRV_HEAV |
MROV heave comp. mode |
|
- |
- |
Generic |
SROV_HCM |
SROV heading control mode |
|
- |
- |
Generic |
SROV_LAT |
SROV lateral control mode |
|
- |
- |
Generic |
SROV_LON |
SROV longitudinal control mode |
|
- |
- |
Generic |
SROV_VCM |
SROV vertical control mode |
|
- |
- |
Generic |
SROV_ACM |
SROV attitude control mode |
|
- |
- |
Generic |
UMB_LF |
Umbilical length Fallpipe [m] |
|
- |
- |
Generic |
UMB_LROV |
Umbilical length ROV [m] |
|
- |
Underwater sensor |
Draft |
UMB_LF_D |
Umbilical length Fallpipe [m] |
|
- |
Underwater sensor |
Draft |
UMB_LROV_D |
Umbilical length ROV [m] |
|
- |
USBL |
Z |
UMB_LF_U |
Umbilical length Fallpipe [m] |
|
- |
USBL |
Z |
UMB_LROV_U |
Umbilical length ROV [m] |
|
- |
USBL |
Z |
FP_MOUTH |
Umbilical length Fallpipe - Umbilical length ROV [m] |
Online
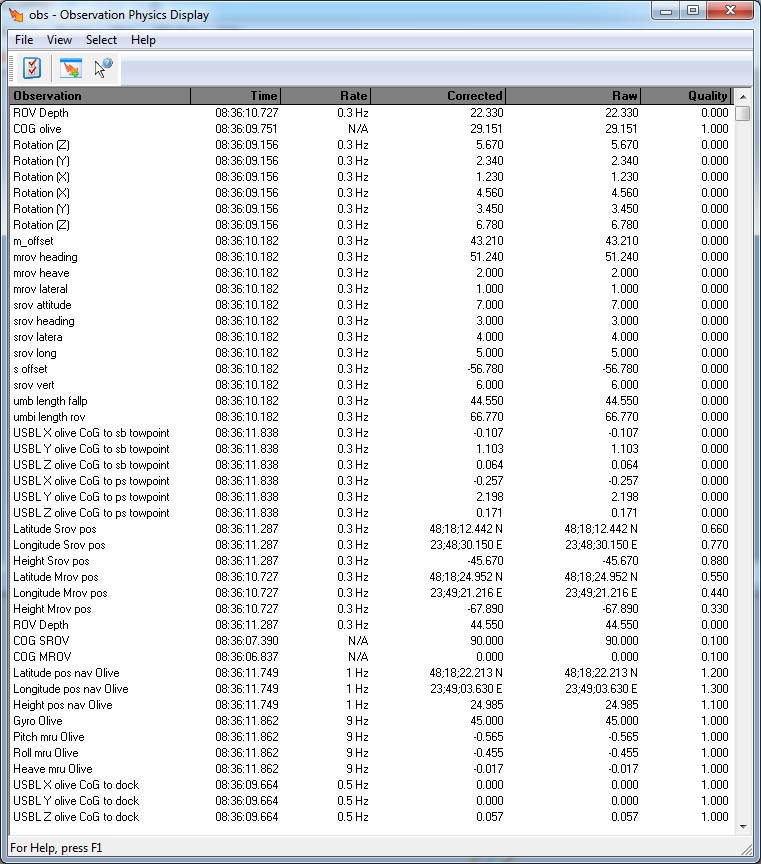
Verify all data is decoded correctly. Open an Observation Physics display and select the observations you are interested in.
If no data is received it could be due to an incorrect database setup or no data is received on the selected port.
The IO-tester can be used to check if any data is received on the selected UDP port .
If all is well, the output of the observation physics will be similar to the illustration below: