
Description
Driver for decoding depth sensor messages in Odom Echotrac Network format over the Echotrac Ethernet interface.

The driver will decode the so-called Acoustic Data Packets.
In general most Odom Echotrac or Hydrotrac echosounders with a LAN connection will broadcast these packets using UDP port 1600.
These messages have an ASCII header and several binary data fields. The header is used for recognizing Acoustic Data Packets.
Driver Information
|
Driver |
Network - Odom Echotrac Sidescan (#MK3) |
Interface Type |
UDP |
Driver Class Type |
|
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
DrvQPSCountedUDP.exe ODOM_MK3 |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Decoding Notes
-
The depth value from the Acoustic Data packet is corrected for a possible draft and/or index offset value by the echosounder unit.
Note that the driver will undo the draft correction.
So the water depth in Qinsy will be between transducer and seabed (i.e. measured depth).
Further, the draft, heave and index offset values are part of the message and can be decoded individually. -
The driver does not send any data or commands to the echosounder system.
-
The time field from the Acoustic Data packet is not decoded so for time-stamping the time of arrival (at the I/O port) will be used.
-
On the echosounder unit you can set certain settings that may affect the reported depth value: the sound velocity, a possible draft, a possible index offset and the unit (meters or feet).
All this information is included in the message and will be decoded and used by the Qinsy driver.
Database Setup
-
Singlebeam Driver
In order to decode the singlebeam depth values from one of the channels, add a Singlebeam Echosounder system to your template setup and select driver "Network - Odom Echotrac (#MK3)". The UDP Port number is normally 1600, unless the manufacturer states differently.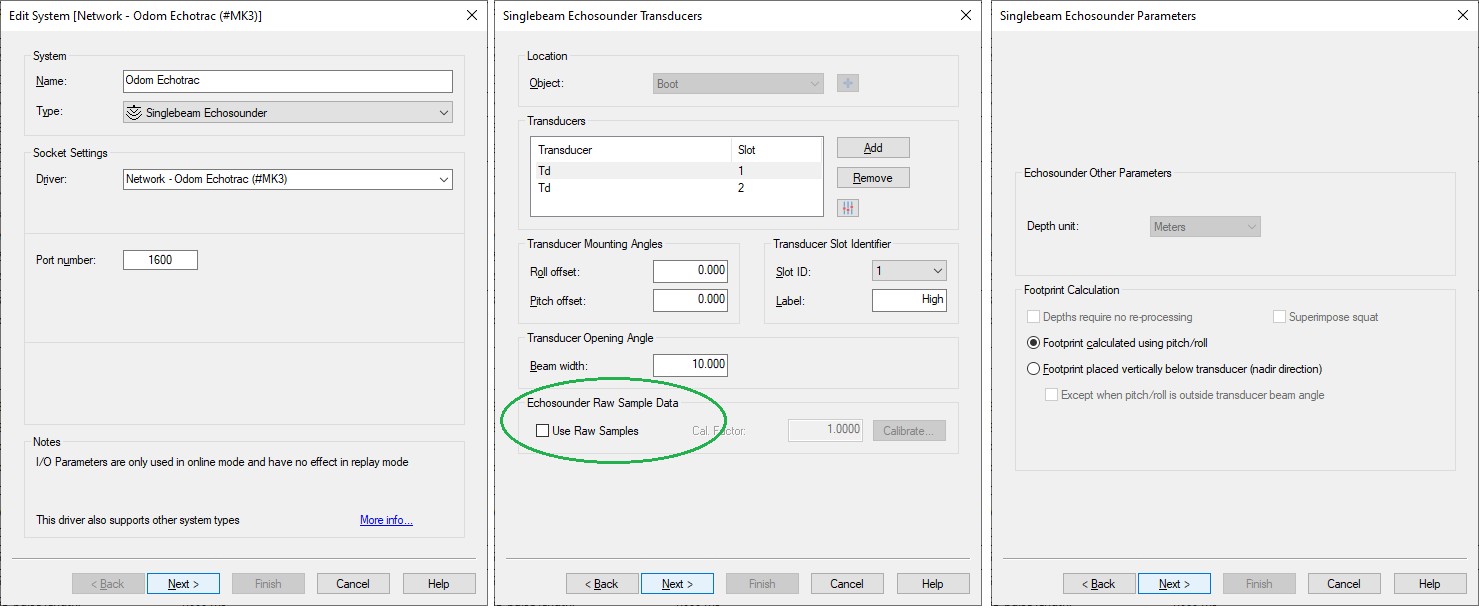
On the next wizard page, add one or two transducers and set their Slot IDs to '1' and '2' respectively.
This Slot ID is used to distinguish the channel type from the decoded ASCII header of the message.
If you want to log the bathymetry acoustic samples (so called water-column data), then enable 'Use Raw Samples' for each selected transducer.
As of May 2014 this data can be viewed in the Echosounder Display online and can also be reviewed offline in the Water Column Inspector Utility. The acoustic samples storage will increase the file size tremendously, so do not enable it unless you really need it.
On the third wizard page note that you can't set the Depth unit. It will always be 'Meters ', regardless of whether the Echotrac has been set up for outputting in meters or feet.
-
Sidescan Driver
In order to decode side scan data from the port or starboard channel, add a Sidescan Sonar system to your template setup and select driver "Network - Odom Echotrac Sidescan (#MK3)". Use the same UDP Port number 1600 as for the Singlebeam Echosounder driver.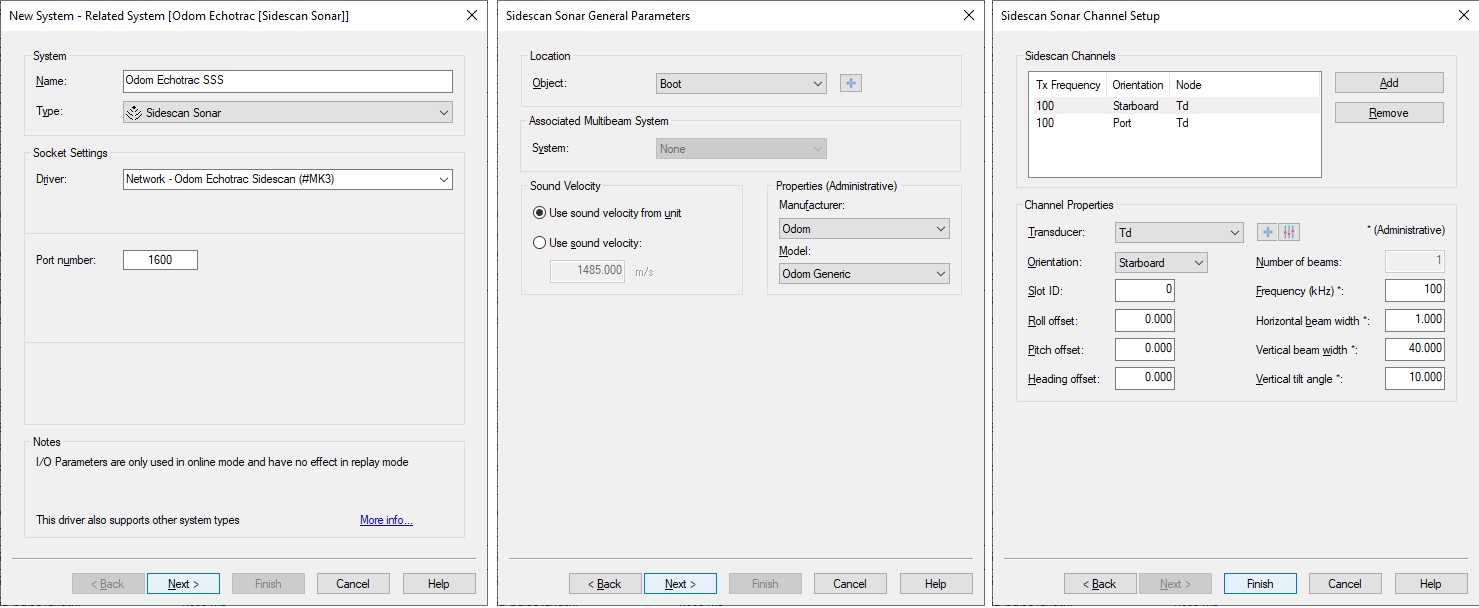
On the next wizard page Use sound velocity from unit, Manufacturer: 'Odom' and Model: 'Odom Generic'.
On the third wizard page, add two sidescan channels and select for Orientation: 'Port' and 'Starboard' respectively.
Although the Slot ID is important for the Singlebeam driver, the Sidescan driver will ignore it so you may leave it at zero. The driver will use the information from the decoded Acoustic_Data field in order to distinguish whether the data is from the port or from the startboard sidescan channel. -
Special Setup
As explained under the setup for the Singlebeam driver, the raw acoustic samples can be decoded and stored, but not viewed at the moment. As a workaround for this shortcoming, you may use the following trick in order to (mis)use the existing Sidescan display as water-column display:
Add a Sidescan Sonar system to your setup as explained above, but instead of adding a channel with orientation 'Port' or 'Starboard', add a channel with Orientation 'Forward'. This will now decode the bathymetry acoustic samples for channel type 1. Add another channel with Orientation 'Backward' for decoding the bathymetry acoustic samples for channel type 2.
While online, you can now show the 'water-column' data using a Sidescan display.
However, the displayed data is still scrolling from top to bottom, instead of horizontal from right to left.
Controller
Use the Controller's Refraction settings if you wish to improve the reported depth with a better sound velocity.
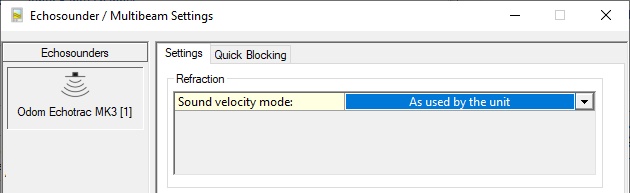
Here you may overrule the default sound velocity as used by the echosounder unit in order to improve the measured depth with a better sound velocity.
-
As used by the unit (default)
Qinsy will use the decoded depth value as reported by the unit.
Use this mode when you're confident that the used sound velocity is accurate enough for your survey specifications. -
From calibrated sound velocity
Use this mode when the echosounder unit is using a default/wrong/out-dated sound velocity and from your own measurement/calibration you have determined a better sound velocity value. -
From velocity profile (recommended)
Use this mode when your setup has an up-to-date sound velocity profile for your survey area.
This mode is recommended because ray-tracing will be used for the entire water-column instead of one fixed sound velocity value. -
From velocity observation
Use this mode when the echosounder unit is using a default/wrong/out-dated sound velocity and you have a sensor defined in your setup that measures in real-time an accurate sound velocity value.