
Description
Driver for annotating and decoding depth sensor messages in Odom Echotrac Network format ("#MK3,1,M" Binary).
The driver will decode the Acoustic Data Packets which are received from the Odom Echotrac echosounder over a UDP network.
These messages have an ASCII header (#MK3,1,M) and several binary data fields. The header is used for recognizing Acoustic Data Packets.
The acoustic sample parameters are used to calculate the expected size of the message.
Only the depth parameter will be used for further processing
The reported depth value inside the Acoustic Data packet is corrected for a possible draft and/or index offset value by the echosounder unit.
Note that the driver will undo the draft correction, so the decoded water depth in Qinsy will always be between transducer and seabed.
The draft, heave and index offset values are part of the message and will be decoded individually.
This driver has user-interface, so settings can be changed online. The driver's dialog should be present in the Windows Taskbar.
The format of the annotation output string can be selected online, under Settings – Annotation. By default, this is the same format as for decoding data.
There is also a possibility to send a direct annotation string.
Note that decoded values are not shown in the driver's dialog, only settings. In order to see decoded results please use e.g. an Observation Physics or Echosounder display.
Driver Information
|
Driver |
Network - Odom Echotrac (Control on data port) |
Interface Type |
UDP + TCP-IP |
Driver Class Type |
|
|---|---|---|---|---|---|
|
Yes |
Input / Output |
Input and Output |
Executable |
DrvAnnotateUDP.exe ODOM MK3UDP |
|
|
Related Systems |
|||||
|
Related Pages |
|
||||
Warning
Driver "Network - Odom Echotrac (Control on data port & TD depth)" has become deprecated since Qinsy 9.4.
Please replace this driver with driver "Network - Odom Echotrac (Control on data port)" when you receive the following warning in your template database setup or when going online :
Note that this driver "Network - Odom Echotrac (Control on data port)" will act exactly the same as the deprecated driver.
System Config
System Configuration
The Odom Echotrac annotations can be received and viewed in the Echart software.
To configure Echart to work with Qinsy, the UDP port can be changed under the Preferences.
The default UDP port is 1600:
To use the function to automatically record in Echart when data is recorded in Qinsy, the option 'Automatically synchronize recorded files with survey lines' must be checked:
Qinsy Config
Database Setup
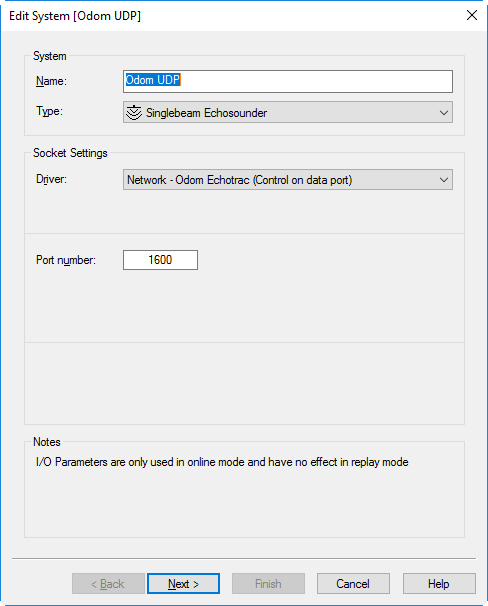
Edit System
Select driver "Network - Odom Echotrac (Control on data port)".
The (Network UDP) Port number must be the same as the RemoteComputerPort number, where the Odom Echotrac Echosounder sends the data onto the network.
Singlebeam Echosounder Transducers
In order to decode the raw acoustic samples (water column data) from each channel, select (or highlight) the relevant Transducer and enable the 'Use Raw Samples' checkbox.
Just leave the Cal.Factor on 1.0 (it is not used).
If you are not interested in the water column data (or e.g. only for one channel), you may leave the 'Use Raw Samples' checkbox unchecked because the recorded databases will grow in size.
Singlebeam Echosounder Parameters
The default depth unit will be meters and can't be changed here.
The driver will automatically recognize if data has been reported in meters or in feet.
Echosounder Accuracy Parameters
Qinsy Online
Controller
Use the Controller's Refraction settings if you wish to improve the reported depth with a better sound velocity.
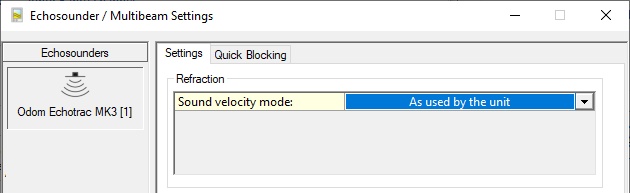
Here you may overrule the default sound velocity as used by the echosounder unit in order to improve the measured depth with a better sound velocity.
-
As used by the unit (default)
Qinsy will use the decoded depth value as reported by the unit.
Use this mode when you're confident that the used sound velocity is accurate enough for your survey specifications. -
From calibrated sound velocity
Use this mode when the echosounder unit is using a default/wrong/out-dated sound velocity and from your own measurement/calibration you have determined a better sound velocity value. -
From velocity profile (recommended)
Use this mode when your setup has an up-to-date sound velocity profile for your survey area.
This mode is recommended because ray-tracing will be used for the entire water-column instead of one fixed sound velocity value. -
From velocity observation
Use this mode when the echosounder unit is using a default/wrong/out-dated sound velocity and you have a sensor defined in your setup that measures in real-time an accurate sound velocity value.
Additional Info
Drivers IO Notes
Command line parameter ODOM indicates the manufacturer of the interfaced system.
MK3UDP defines the type of echosounder.