Description
Driver to decode LBL range measurements between NASNet ® stations (fixed on seabed) and one or more hydrophones (e.g. located on an ROV or Vessel) or a construction receiver (e.g. located on an off-shore construction) in order to calculate a position for that ROV, Vessel or Construction.
NASNet ® is an acoustic system that provides ranges in the form of a "Time of Flight" (ToF) value in seconds from a network of Stations (beacons) calibrated on the seabed.
The positions (X,Y and Depth) of the stations have been established by box-in. At present the network can consist of up to 31 Stations, but will support more in the future.
Several Receivers can be used simultaneously and each receiver will have a set of TOFs available.
For each individual receiver, on receipt and decoding of a ToF the data is immediately output on a serial port in an NMEA type telegram i.e. each receiver will have a separate serial port.
Driver Information
|
Driver |
Nautronix LBL |
Interface Type |
Serial |
Driver Class Type |
Terminated <CR> |
|---|---|---|---|---|---|
|
Yes and No |
Input / Output |
Input |
Executable |
DrvQPSTerminated.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Decoding Notes
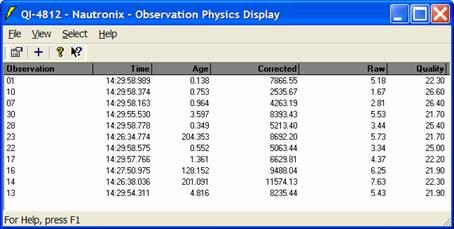
The time of the datastring is not decoded, data is time-stamped when received at the I/O serial port.
The ToF (Time of Flight) values are decoded as one way travel times, so the raw values seen in the Observation Physics are in seconds. The corrected values should reflect the actual range, in survey units.
The signal to noise value is decoded as Quality indicator for each observation.
Interfacing Notes
The driver is a so-called passive driver, i.e. it does not send commands or data back to the sensor.
Data is transmitted via serial cable, so only one-way cable wiring is needed, using the following wiring diagram:
|
DB-25 |
Sensor |
or |
DB-9 |
Sensor |
|
DB-25 |
COM |
or |
DB-9 |
COM |
|---|---|---|---|---|---|---|---|---|---|---|
|
Pin 2 |
TXD |
|
Pin 3 |
TXD |
----- |
Pin 3 |
RXD |
|
Pin 2 |
RXD |
|
Pin 3 |
RXD |
|
Pin 2 |
RXD |
X |
Pin 2 |
TXD |
|
Pin 3 |
TXD |
|
Pin 7 |
SG |
|
Pin 5 |
SG |
----- |
Pin 7 |
SG |
|
Pin 5 |
SG |
Online
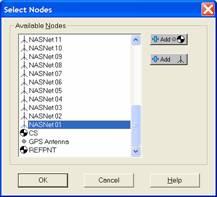
First, define for each available seabed Station a Fixed Node into your setup:
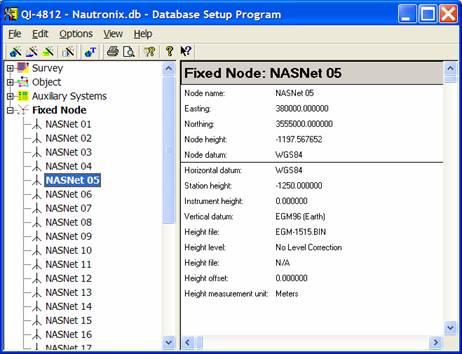
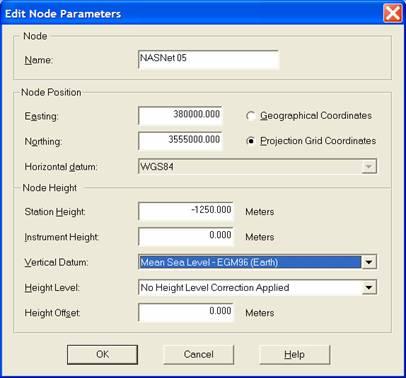
Enter the fixed node co-ordinates in easting/northings (grid) or in latitude/longitudes (geo). If for the station the depth below mean sealevel is given (and not a height), make sure to enter a negative number for the Height field, and set the Vertical Datum to Mean Sea Level.
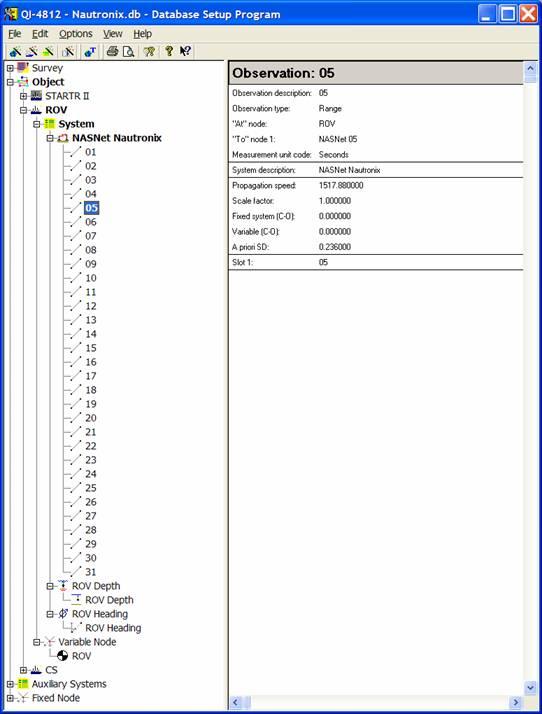
Secondly, add a new system for the object that has the hydrophone mounted on. Select driver type Surface Navigation System, and select for the driver "Nautronix LBL (NASNet $PNIXO)".
On the second wizard page, add for each available station a range observation:


Important: The Slot 1 number must be exactly the same as the station id found in the ASCII datastring (e.g. enter "01" (and not "1"), if the station Id field is "01" in the datastring):

After adding all observations, select Next to go to the last wizard page:

The driver decodes the one-way travel time of the sound through water between station and receiver.
Therefore set for each observation the unit to "Seconds", and enter the right A-priori SD and the Propagation speed (sound velocity).