
Description
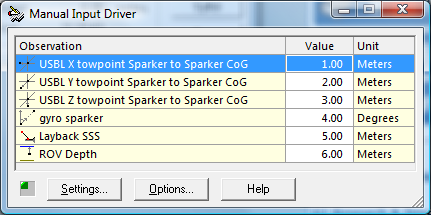
Driver with user interface that can be used to manually enter various observations types for various system types.
The following system types are supported:
-
Single Beam Echosounder
-
USBL
-
Gyro Compass
-
Surface Navigation System
-
Tide Gauge
-
Miscellaneous System
-
Speed Log
-
Underwater Sensor
-
Layback System
Driver Information
|
Driver |
Manual Layback
|
Interface Type |
|
Driver Class Type |
Manual |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
DrvManualGeneric.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Online
The observation values are entered in the units that were defined in DbSetup. The entered values are considered to be raw, so uncorrected for any c-o's.
The Controller will always start a single instance of this driver, which will then handle all the systems for which in DbSetup the "# Manual ..." driver was chosen.
The last entered values as well as the size and position of the driver window are stored in the registry so on restart of the Controller the driver will show up the same as when it was closed.
The driver can either only update an observation when it is changed by the user or automatically update all the observations every user definable time interval (e.g. 1 second). The latter means that the same value is copied over and over again in the database even when it doesn't change. Although this seems over the top it is the preferred way of working because it keeps the values "fresh".
Option how the cells in the user interface are filled and displayed. You can enter a user definable row height here, the font is automatically resized as well, this is useful when a larger font is required for the shown lines.
The resolution allows you to select the number of digits used to display the fraction of the number, can also be inherited from the Project Settings.