
Description
Driver for L3 Communications (ELAC, Seabeam) 1000 series multibeam echosounders (1050,1055,1180,1185) using a network connection to the L3 Communications supplied HydroStar software. The driver supports Qinsy's Multibeam and Sidescan system types.
The driver uses a network connection with the L3 supplied HydroStar software to obtain the multibeam data. The system time on the computer running the HydroStar software needs to be synchronized to the system time of the computer running Qinsy. This may be accomplished by synchronizing both computers to the same time frame (i.e. a PPS interface on both computers) or by running the Qinsy and the HydroStar software on the same computer.
Driver Information
|
Driver |
L-3 ELAC Seabeam1000 series |
Interface Type |
TCP-IP |
Driver Class Type |
|
|---|---|---|---|---|---|
|
Yes |
Input / Output |
Input |
Executable |
DrvSeabeamSocket.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Decoding Notes
The timetag from the data packets is used.
Therefore it is required to synchronize the times of the Qinsy and the HydroStar system to UTC using an external timeframe (i.e. PPS interface from a GPS receiver).
The packets that are decoded are:
-
Multibeam General, Beam, Travel Time, Quality, Amplitude, Delay, Angle, Properties, Pitch Groups
-
Sidescan General, Amplitude v.s Travel time, Weighting groups.
The decoded Quality Indicator (QI) can be interpreted as a figure with a value between 1 and 8.
1 stands for best quality, 8 for worst quality.
System Configuration
Changing the Hydrostar Software priority setting
Note: This info may be outdated!
To allow accurate time tagging of the sensors in Qinsy the priority of certain drivers is elevated above the normal priority setting. Since the HydroStar software functions as an intermediate driver between the L3 Seabeam unit and Qinsy its priority also needs to be increased. Because Qinsy only increases the priority of its own drivers the user has to manually increase the priority of the HydroStar software. This has to be repeated every time the user starts the HydroStar software. However this procedure only needs to be executed when the HydroStar software and Qinsy are running on the same computer. If the HydroStar software is running on a separate computer (which needs to be synchronised to the computer running Qinsy) this procedure is not required.
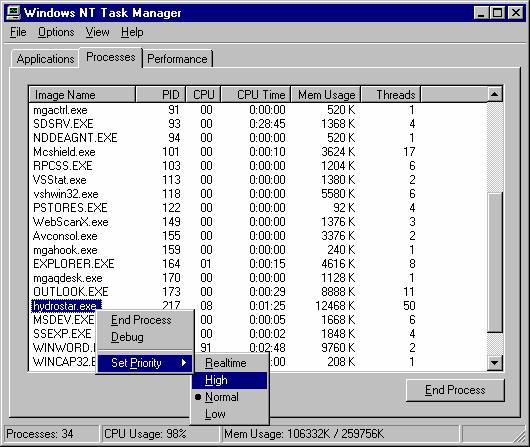
To increase the priority the user has to start the Task Manager by right clicking in the taskbar. After the Task Manager has started the second tab sheet called 'Processes' shows all the running processes. The user should search for a process called "hydrostar.exe". Once found, he/she should right click on the process to change its priority setting to "High" (see screen capture above). This makes sure that Hydrostar software receives enough CPU time to perform accurate time tagging.
Database Setup
The Acoustic center for the transducer(s) is the center of the face of the transducer. The offset position (node) within the vessel frame point should have been measured and entered into the database. Note that for a dual transducer system two Multibeam nodes, one for each transducer, should be measured.
Single transducer Multibeam
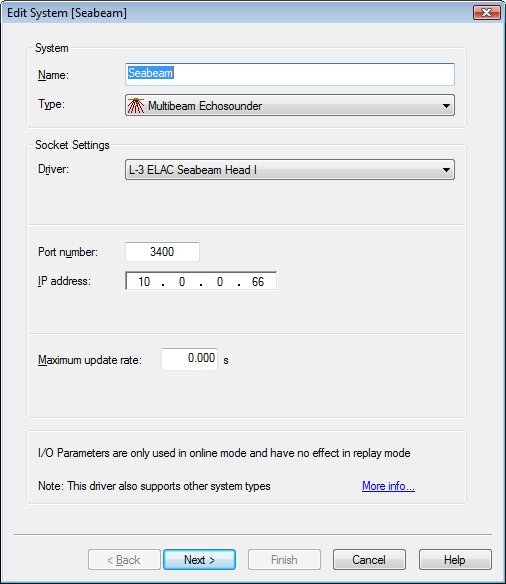
Add a new multibeam system to the database, driver "L-3 ELAC Seabeam Head I", set max beam count to 126 beams. IP Number should be that of the computer on which Hydrostar software is running. If Hydrostar is running on the same PC as Qinsy you can select IP Address 127.0.0.1. The Port number should always be 3400. The node that represents the acoustic center should be selected as Transducer Node.
Dual transducer Multibeam
Add a new multibeam system as described above, but with the max beam count set to 63. This system will usually point to the port side of the vessel. Now add a second multibeam system, driver should be "L-3 ELAC Seabeam Head II" again with 63 beams and same IP and port number. The second system will usually point to the starboard side of the vessel. The node that represents the acoustic center should be selected as Transducer Node again.
Sidescan
Optionally you can also add a new sidescan system, Same IP and port as for multibeam. Always select two channels, one port-one starboard. Select same node as for multibeam.
Seabeam IP Number & Port Number Configuration
From the HydroStar software the data packets are sent over a network link. This requires all computers involved to run the TCP/IP protocol on their network cards. As with any network configuration, the IP numbers for all computers involved should be unique. The following screen capture shows an installation on which the HydroStar software is running on the computer with IP address 10.0.0.66 and is listening on port 3400 (= default HydroStar port).
Online
When online, select the "Echosounder settings" option from the "Settings" menu to define the online blocking and filtering of the multibeam echosounder data.
Use a Raw Multibeam Display to show raw data and a Swath System Display to show the corrected scans.