
Description
2009.09.10
Added support for new cmdline NOPVC, in order to accept data with a non-valid position validity (field 9).
See Coding Notes for more information about this
Driver to decode the absolute or relative positioning message from an iXSea GAPS (Global Acoustic Positioning System), a fully integrated (INS and GPS) portable USBL system.
Two versions of the driver are available, a serial version and a Network version (UDP). The internal working of the drivers are the same except for the data reception.
This section will describe how to decode the absolute positioning message. To decode the relative positioning message, see the related IxSea GAPS USBL drivers
Driver Information
|
Driver |
iXSea GAPS ($PTSAG Message)
|
Interface Type |
Serial /
|
Driver Class Type |
Terminated <LF>
|
|---|---|---|---|---|---|
|
Yes and No |
Input / Output |
Input
|
Executable |
DrvIxseaGaps.exe
|
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Decoding Notes
Date and time from the message may be decoded, but only if you are sure that this is UTC time AND that Qinsy also uses PPS. In that case you have to select the driver with the "With UTC"-option.
Otherwise the data will be timestamped when it is received at the I/O port.
Data is only accepted when the Position Validity (field 11) indicates a 'F'.
If you want to overrule this position validity check, and want to accept all data, even if field 11 does not state a 'F', then select the driver with the "No PV Check"-option.
When the position validity is valid ('F'), then the calc/solution mode for a Position Navigation System is zero, which can be monitored using a Positioning System Display.
When the position validity is not valid ('0'), then the calc/solution mode for a Position Navigation System will be -1.
The Frame number (field 1) is not used by Qinsy, but it is decoded for test purposes. You may monitor this frame number by using a Positioning Display, and check the Differential Age value.
The depth validity (field 13) nor the sensor depth (field 14) are decoded.
Interfacing Notes
No specific serial interfacing or configuring recommendations.. The driver does not send any commands to the GAPS.
If you use the network driver, data should come in via an UDP network connection.
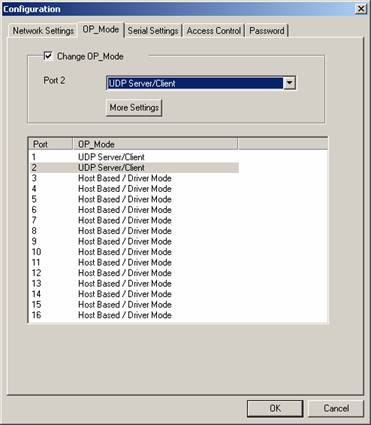
For MOXA NPort Server Pro (8/16 Ports Serial Device Server ) Users the following example settings for the DE-300 series (using the Configurator software):
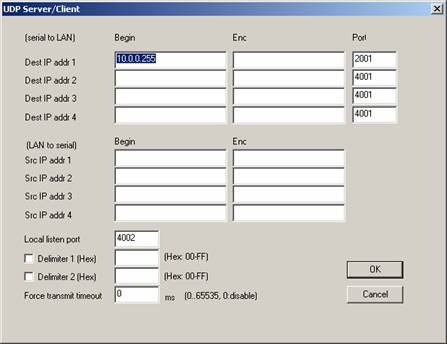
Suppose you want to broadcast serial data, coming in on Port 2 of the NPort Server, to UDP Port 2001
Notice the mask of '255' at the end of the destination IP address. This is recommended instead of using the exact IP address.
Database Setup
Add a Positioning System in your template and select the driver "iXSea GAPS ($PTSAG Message)"
Note . It is important to set the receiver number on the Position System Parameters wizard page. This number must be the same as the Transponder # (from field 6) and must be 0 (zero) to decode the ship's position.
Also important is to set the Horizontal and Vertical Datum correctly.
The Horizontal datum must be the datum of the latitude and longitude field (probably WGS84).
The Vertical datum must be a MSL model, because the driver will decode field 12, the calculated depth, as height reference.