
Description
Driver to decode multibeam data from an Imagenex (http://www.imagenex.com/) Model 881L profiling/Imaging system. This system comprises of one head which can deliver more than 1000 sounding per rotation. Beam data is broadcast via network UDP packets by the Imagenex Win881L application. Qinsy driver(s) will receive and decode the beam data and transfer it into the Qinsy system. Note that when using this driver the sonar should be controlled by the Win881L application. The latter may run on the same pc as Qinsy.

Figure: Transducer head
Driver Information
|
Driver |
Imagenex 881L Profiler (No Control) |
Interface Type |
UDP |
Driver Class Type |
|
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
DrvProfilerUDP.exe |
|
|
Related Systems |
|||||
|
Related Pages |
|
||||
Decoding Notes
Driver decodes raw range and angles (no beam intensity) from the data. Driver uses the UDP arrival time of the packet as the observation time, since the 881L sonar can not be synchronized to UTC time the arrival time may be subject to network latency. The reported angles are with respect to the reference direction of the sonar head. The ranges are reported in 2 millimeter or 10 millimeter units depending on the range. The ranges are always valid for a default sound velocity of 1500 m/s regardless any user settings in the Win881L software.
The 881L system delivers a continuous stream of soundings which are buffered by the driver. The driver recognizes the end of a scan by monitoring the decoded rotating direction. If a swap over of direction is detected then the driver will decode the buffered soundings as a complete ping. If the 881L is scanning in continuous 360 degree mode then the scan direction will of course not change. In that case the zero crossover direction is used to detect an end of scan. Either way if a scan takes longer then 20 seconds to finish then it will be decoded in multiple parts to prevent too old multibeam data entering Qinsy with the risk that attitude data is no longer available.
Interfacing Notes
To minimize the chances of network latency and hence wrong decoded observation times we strongly advise to connect the Sonar directly to the Qinsy PC by a cross-over network cable and NOT via a hub or switch.
System Configuration
When the 881L is used for profiling the transducer head should be mounted in such a way the head angle reports zero when looking straight down. For imaging (sector scanning) the head angle should report zero when looking in the forward direction.
The Win 881L software should run alongside Qinsy. Make sure to setup the Win 881L software to output UDP packets to the IP number of the Qinsy PC on a desired port number. Default port number is 4040. IP and port number can be changed by modifying the "Win881L.ini" file that is located in the same folder as the Win881L software. Change settings IPAddress_Output1 and RemotePort_Output1 as found in ini file, if Qinsy and Win881L software run on same pc then the IP number may be set to "127.0.0.1".
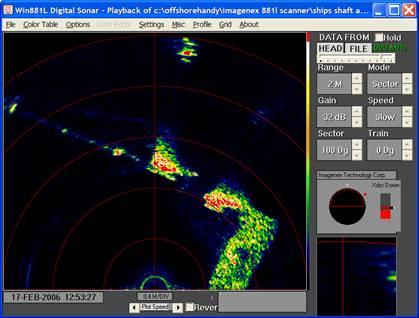
Figure: Win 881L software
Database Setup
Add new multibeam system to the template, select Driver "Imagenex 881L Profiler". The default UDP output port of the Imagenex software is 4040.
For profiling mode, roll, pitch heading offsets should be around zero, in imaging mode the pitch offset should be around +90°.
To prevent any attitude issues make sure that update rates for motion sensors are not set higher then typically 10-20Hz. Qinsy will buffer a limited number of pitch/roll and gyro readings and since a scan may take up to 20 seconds to finish it can occur that the process that calculates the beam position runs out of attitude information if update rate are too high (>25 Hz).
The node defined for the transducer should be located in the acoustic center of the transducer head, refer to manufacturers' documentation for details on the acoustic center.
Additional Information
For more information refer to Imagenex website: http://www.imagenex.com/.