Description
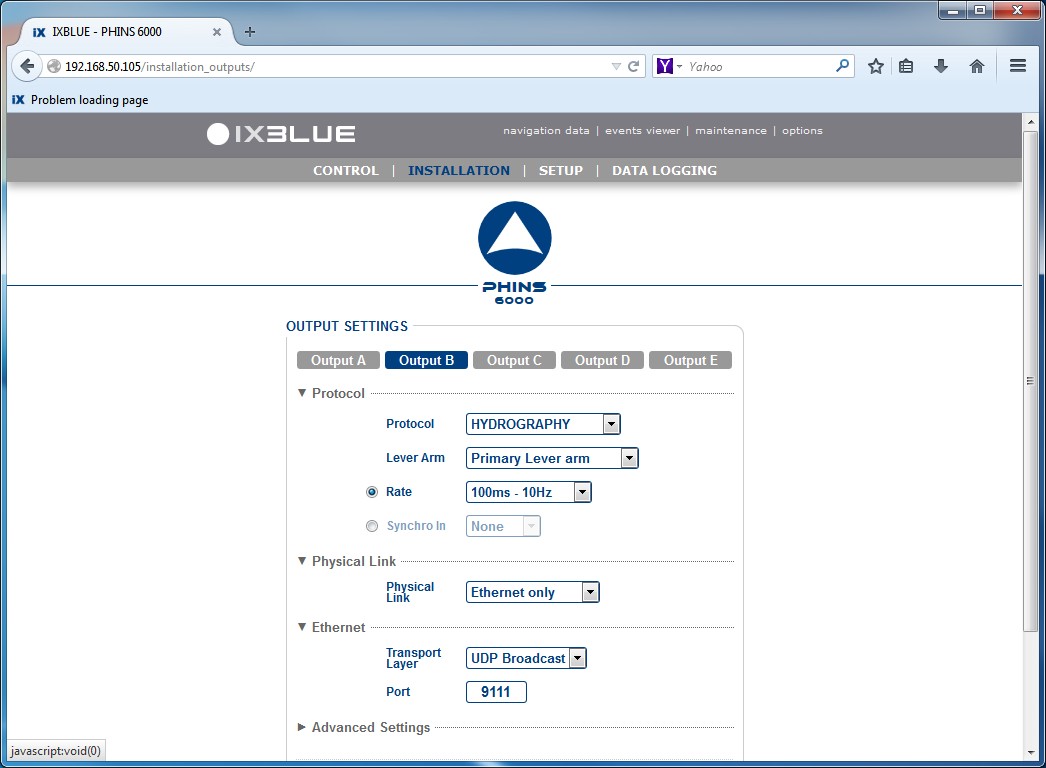
Driver for decoding the height value as an "ROV Depth" observation, coming from an iXBlue PHINS outputting the so-called HYDROGRAPHY protocol.
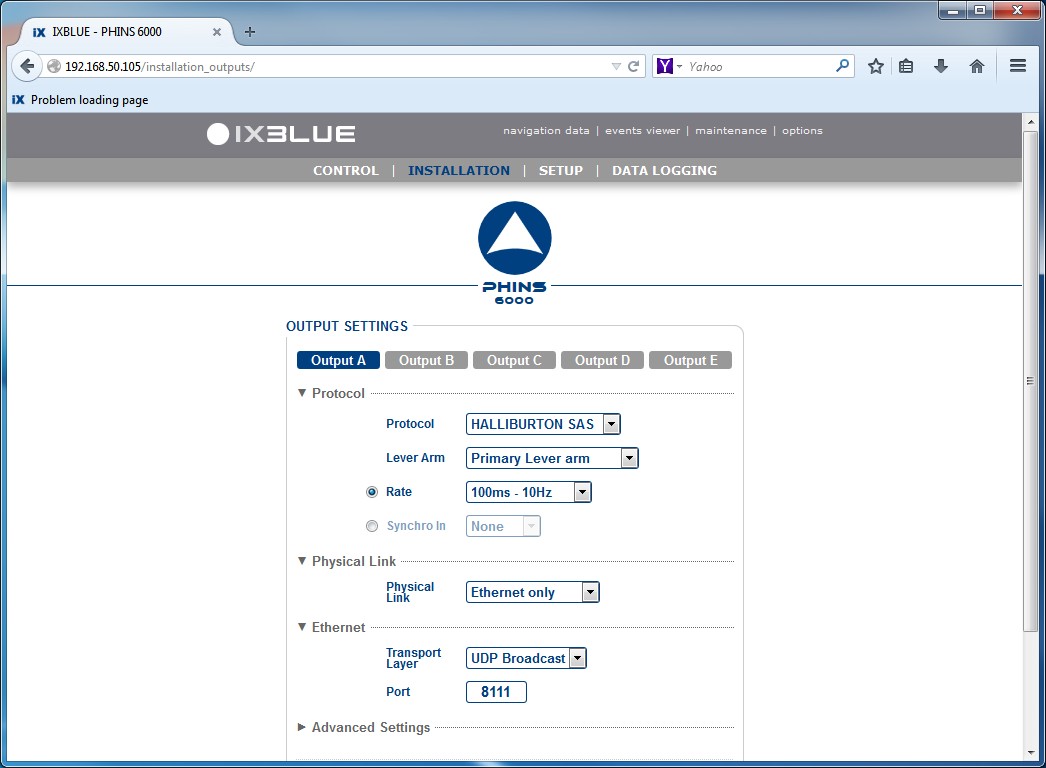
The same observation is also available from the Halliburton SAS protocol, but this protocol is less accurate.
For example below you can see the same ROV depth observation: the first one is decoded using the Halliburton SAS driver (cm resolution) and the second one using this driver (mm resolution):
.png?cb=3dfa64c132e8983513274f300b286761)
Driver Information
|
Driver |
Generic - PHINS HYDROGRAPHY (ROV Depth) |
Interface Type |
Network (UDP) |
Driver Class Type |
Terminated |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
PHINSHYDROGRAPHY(ROVDepth).ini |
|
|
Related Systems |
|||||
|
Related Pages |
|||||
System Configuration
PHINS Setup
Database Setup
Define in Database Setup a system of type 'Underwater Sensor' and select the driver 'Generic - PHINS HYDROGRAPHY (ROV Depth) (Network)'.
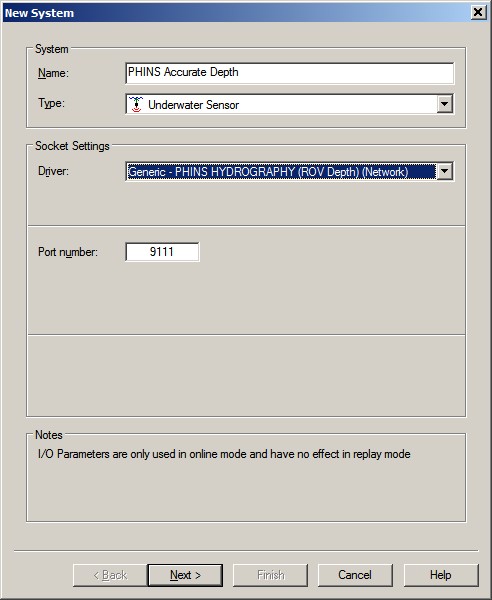
Set the correct (UDP) port number and select Next.
An ROV Depth observation will be added automatically, but you have to select the correct node location for this depth sensor:
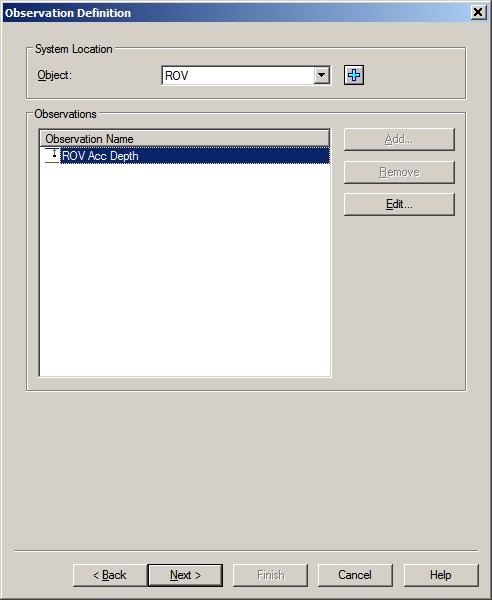
So, on the 2nd wizard page, select first the object that represents the ROV. Then, highlight the Depth observation and select Edit.
Select the node located on the towed object that represents the depth sensor.
Select OK and then Next to go to the last wizard page.
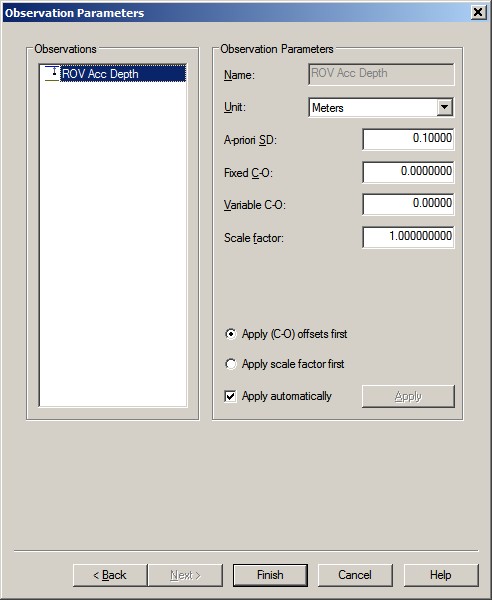
On this last page you don't have to change the default parameters, or perhaps you may want to change the default a-priori SD of 0.1m.
Notice that the scale factor that converts the reported height (field 7) to a 'depth' is already defined as -1 within the Generic I/O Driver Editor, so you should leave this scale factor at +1.
Online
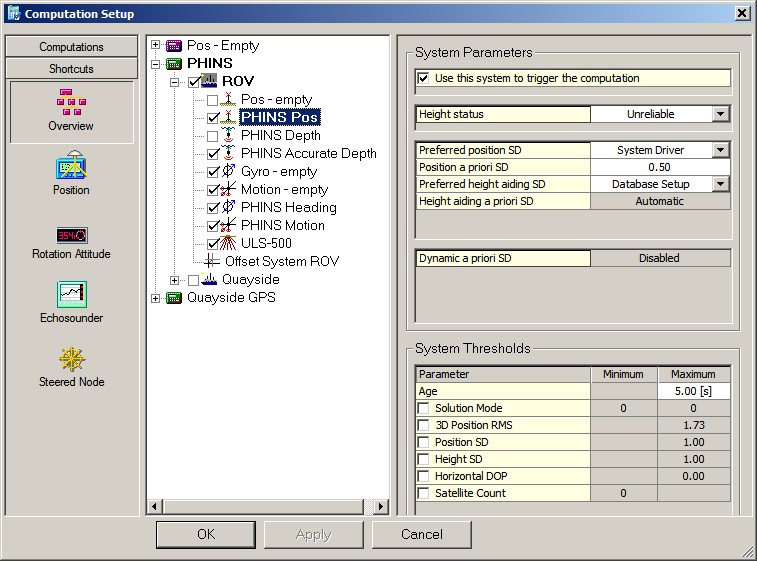
First, set the Height status of your PHINS Positioning system to 'Unreliable'. Although the height has the same source as the ROV depth, it is advisable to use the depth instead if you want to correct for tide.
So enable the accurate ROV Depth observation from this is Underwater System, and make sure to disable the ROV Depth from the Halliburton SAS protocol.