Description
This driver decodes Multibeam, attitude, position and tide information from the WASSP F series multibeam sonar systems.
These devices are not primarily intended to be used as survey devices and as such are not a perfect match for Qinsy's workflow. A couple of things to notice when using these units:
Data correction
As this device outputs footprint data without a high resolution time tag and not immediately at the moment of calculation, Qinsy cannot apply attitude data to the footprints. In order for Qinsy to get correct footprint data from the WASSP F unit, roll, pitch and heave correction must be applied by the device. This can be enabled using ENL's WASSP 80/160 F software.
The driver supplies the decoded roll, pitch and heave for informational purposes, but this data should not be used in the calculation as this would lead to double application of the attitude data.
Tide
The WASSP F footprint data is tide corrected (when set up correctly in the WASSP 80/160F software). Tide correction is reversed by the WASSP F driver.
The driver does support a tide gauge system, so the tide as reported by the unit can be used, but another tide source can be used as well. More information on setting up tide can be found here.
Draft
Draft can be applied either in the WASSP F unit or in Qinsy. In either case, make sure to use the bottom of the WASSP F's transducer as draft reference (e.g. the 'height above draft reference' of the vessel should be set to the height difference between the vessel's CoG and the bottom of the transducer).
If the draft is set in Qinsy is should be set to zero in the WASSP F 80/160 F software and vice versa.
Driver Information
|
Driver |
WASSP F |
Interface Type |
TCP |
Driver Class Type |
Counter |
|---|---|---|---|---|---|
|
No |
Input / Output |
None |
Executable |
DrvQPSCountedTCP.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Database Setup
Multibeam
Positioning
A WASSP F multibeam system should always be complemented by a WASSP F positioning system and a WASSP F Gyro Compass system (decoded from the same device). Make sure that this (and only this) positioning/gyro system is enabled in the computation in order for Qinsy to properly calculate the footprint positions.
-
Add a new system, select 'Multibeam Echosounder' as type and 'ENL WASSP F' as driver
-
Enter the IP and port number. These should match those set in the ENL WASSP 80/160F software under 'system configuration utility' -> Technician -> Network. The 'External Output TCP Port' is the port used by Qinsy. The output format should be 'WMB<80/160> Format'
-
On the next page, select 'Assume Common Acoustic Center' as transducer setup
Enter the proper node, offsets, maximum number of beams per ping-
PLEASE NOTE: Node offsets should be filled in either in the WASSP F software or in Qinsy, but not in both!
-
Select 'Use sound velocity from unit'
Tick the stabilization check boxes for roll, pitch and heave
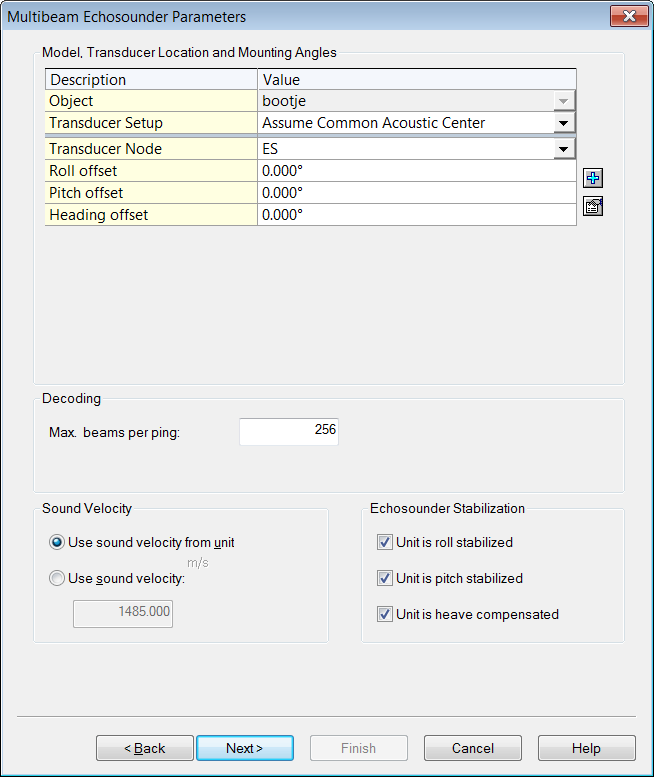
-
-
On the next page, enter the appropriate SD's
-
On the next page, leave all the check boxes unticked and click Finish
Positioning system
-
Add a new system, select 'Positioning' as type and 'ENL WASSP F' as driver
-
Enter the IP and port number. These should match those set in the ENL WASSP 80/160F software under 'system configuration utility' -> Technician -> Network. The 'External Output TCP Port' is the port used by Qinsy. The output format should be 'WMB<80/160> Format'
-
On the next page select the multibeamer's transducer node as antenna
Receiver number can be left at 0
Set the appropriate datums and SD -
Click Finish
Pitch Roll Heave Sensor
-
Add a new system, select 'Pitch Roll Heave Sensor' as type and 'ENL WASSP F' as driver
-
Enter the IP and port number. These should match those set in the ENL WASSP 80/160F software under 'system configuration utility' -> Technician -> Network. The 'External Output TCP Port' is the port used by Qinsy. The output format should be 'WMB<80/160> Format'
-
On the next page, fill in the roll, pitch and heave offsets.
Leave the rest of the settings at their default values.-
PLEASE NOTE: Node offsets should be filled in either in the WASSP F software or in Qinsy, but not in both!
-
-
On the next page, fill in the appropriate SD's. There is no heave delay and there is no quality information
-
Click Finish
Data correction
The driver supplies the decoded roll, pitch and heave for informational purposes (for instance an horizon display).
The decoded data should not be used in the computation as the unit should apply attitude data.
Gyro Compass
-
Add a new system, select 'Gyro Compass' as type and 'ENL WASSP F' as driver
-
Enter the IP and port number. These should match those set in the ENL WASSP 80/160F software under 'system configuration utility' -> Technician -> Network. The 'External Output TCP Port' is the port used by Qinsy. The output format should be 'WMB<80/160> Format'
-
On the next page, fill in the appropriate SD's and C-O's
-
Click Finish
Tide gauge
-
Add a new system, select 'Tide Gauge' as type and 'ENL WASSP F' as driver
-
Enter the IP and port number. These should match those set in the ENL WASSP 80/160F software under 'system configuration utility' -> Technician -> Network. The 'External Output TCP Port' is the port used by Qinsy. The output format should be 'WMB<80/160> Format'
-
On the next page click 'Add Tide'
Click on the add fixed node button
Add any node, the settings do not matter
Select the created node and click OK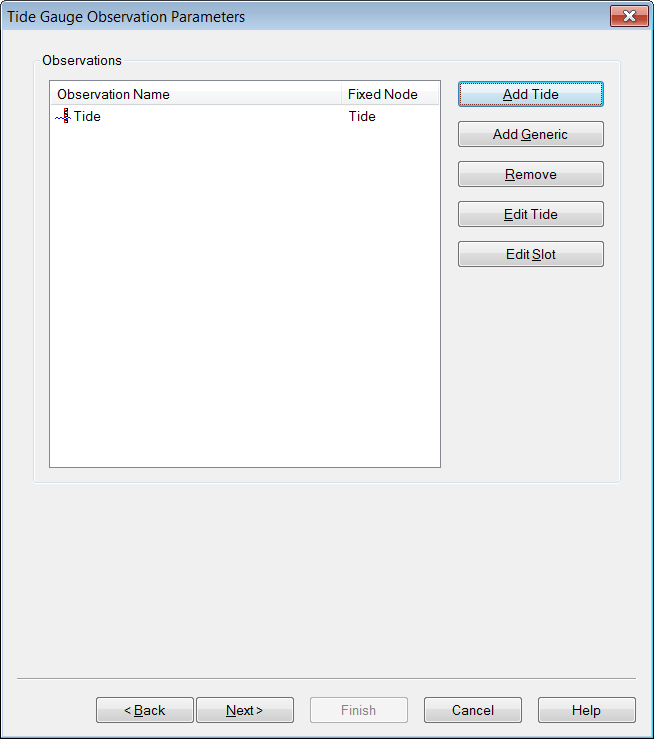
-
On the next page enter the appropriate SD's and C-O's
-
Click Finish
Online
Computation
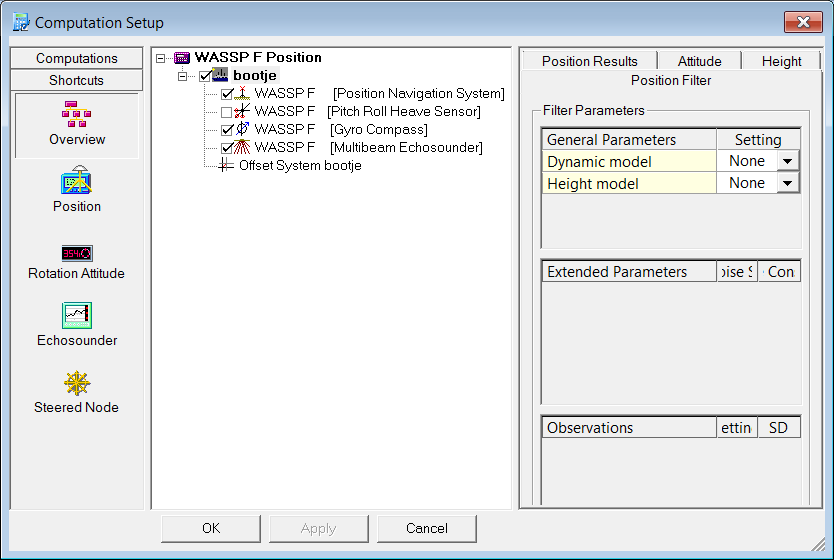
Make sure that Pitch, Roll and heave are not used in the computation by unchecking the system in the computation setup.
Tide
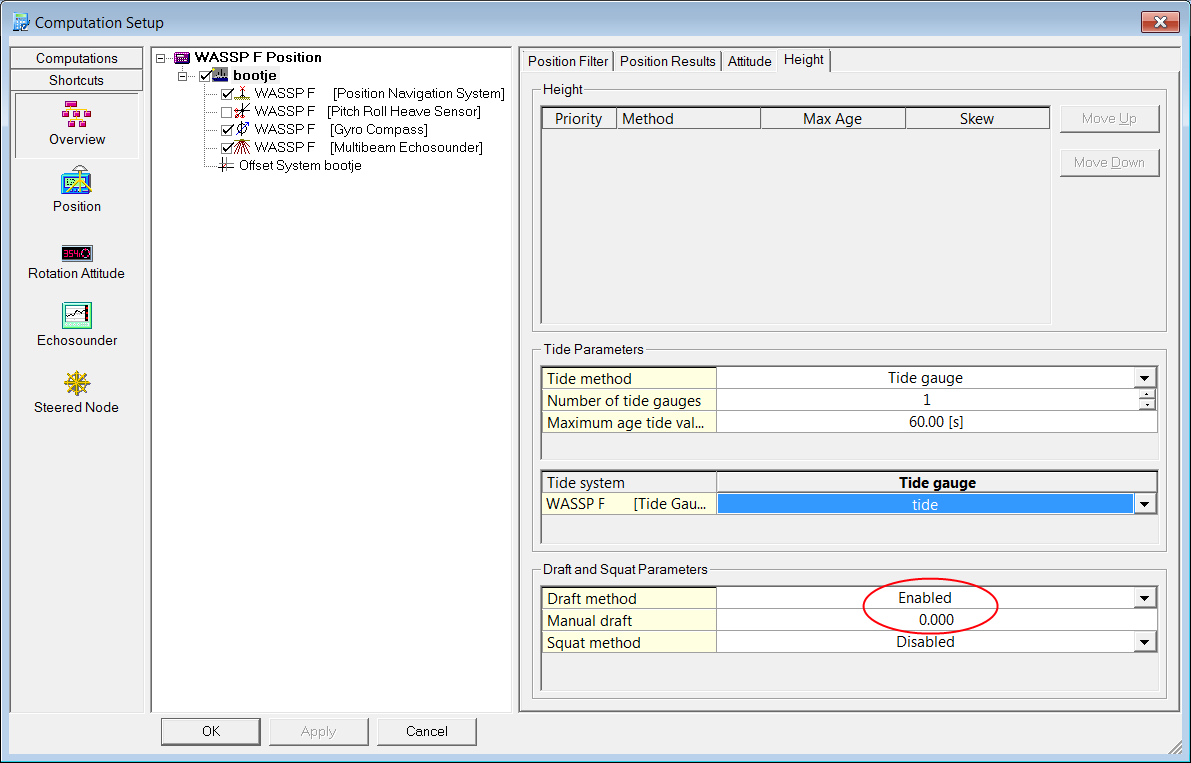
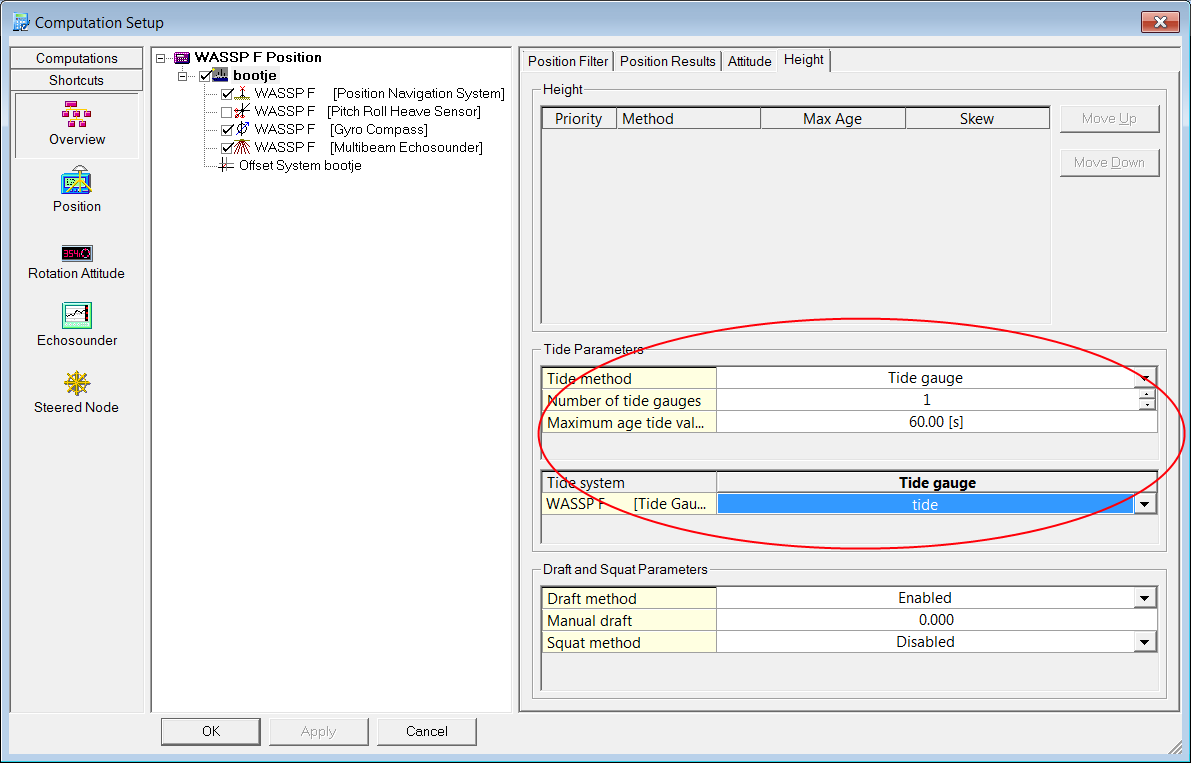
If a Tide Gauge system was added to the database, the tide information from the WASSP F unit can be used by Qinsy. This is setup in the computation setup by selecting the computation and opening the height tab.
Select 'tide gauge' as tide method and the WASSP F tide system as the tide system.
Draft
Draft
Draft can be applied either in the WASSP F unit or in Qinsy. In either case, make sure to use the bottom of the WASSP F's transducer as draft reference (e.g. the 'height above draft reference of the vessel should be set to the height difference between the vessel's COG and the bottom of the transducer).
If the draft is set in Qinsy is should be set to zero in the WASSP F 80/160 F software and vice versa.
The draft can be set in Qinsy manually in the session setup by selecting the computation and opening the Height tab.