
Description
The EdgeTech DF-1000 control driver can be used to manipulate the operational settings of a DF-1000 sidescan sonar.
Note that this driver can only be used to control the operational parameters of the sidescan system, for the acquisition of the sidescan backscatter data you should use a different driver (DrvKlein2000.exe), refer to chapter on sidescan sonar systems for more info on acquiring the sidescan backscatter data.
The control driver has two tasks, the first is to provide the user with the user interface to control the operational settings of the Df-1000 sidescan system.
The second task is to decode observations like range temperature and power supply voltage.
This driver can also be used to decode the heading from the DF-1000 Fluxgate compass.
Driver Information
|
Driver |
EdgeTech DF-1000 Sidescan Control |
Interface Type |
Serial |
Driver Class Type |
Terminated |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input/Output |
Executable |
DrvEdgeTechCtrl.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
System Configuration
The EdgeTech Df-1000 DCI card should be inserted in a free PCI slot of the Qinsy Acquisition PC. The serial port J6 on the DCI board should be connected to an onboard serial port of the PC, either directly via a ribbon cable or with the aid of a PC I/O bracket.
For more details on the serial port refer to the EdgeTech Manual.
The DCI board contains a number of jumpers that set up the DSP serial, parallel and serial control port.
The following jumpers should be set for the control serial port:
-
JP10 NMEA/1200 baud (Top Jumper 1-2 attached/bottom 3-4 removed)
All other jumpers can be left to their default settings, they are not relevant for the serial control port.
When the jumper JP10 is setup as described above the serial port will communicate on 1200 baud, 8 data bits, No Parity and 1 stop bit.
Database Setup
Start the Database Setup program of Qinsy in order to define the control driver.
Add a new system, select type "Miscellaneous Systems" and driver "Edgetech DF-1000 Sidescan Control". Select appropriate Com port and baud rate settings.
Press 'Next' button.
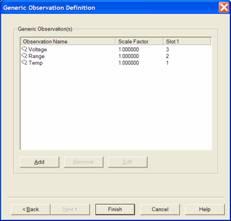
Optionally you can also decode some additional information from the data string sent by the DF-1000 fish.
The following observations can be decoded:
|
Observation |
Slot Number |
|
Temperature |
1 |
|
Operating range |
2 |
|
Power supply voltage |
3 |
Press 'Finish' button to complete the new system setup.
Compass heading
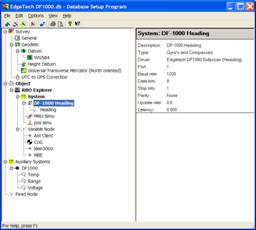
The DF-1000 fish contains a Fluxgate magnetic compass. In order to decode this value and use it as a heading a new Gyro system should be added to the template.
Add a new system of type "Gyro's and Compasses" and select driver "Edgetech DF-1000 Sidescan (Heading)". Select same com port and com parameters as the control driver.
Online
The Controller starts the driver when going online. The driver retrieves its last saved windows state from the registry on startup.
On startup the driver will send its previous stored settings to the Df-1000 fish.
The driver window looks as follows:
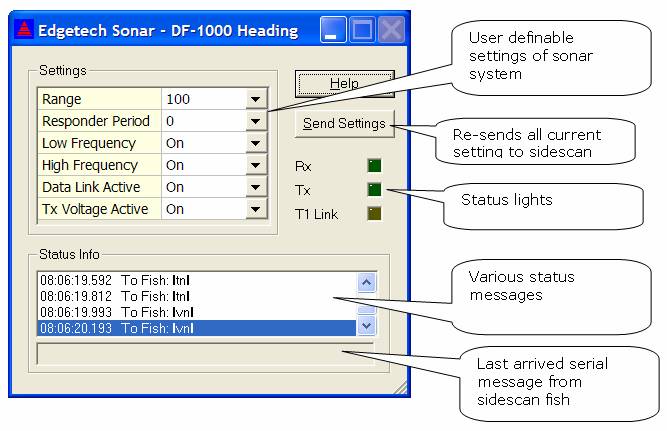
Status Lights
These status lights give the user insight into the status of the driver and the connection to the DF-1000.
|
Rx |
If lit blue then serial data is being received but it could not be decoded. If lit green then data can be decoded too. |
|
Tx |
If this light lights up then commands are being sent to the fish. |
|
T1 Link |
If this lights up then data link to fish is valid. |
Send Settings
This button enables the user to force a re-sending all the settings to the fish. In normal conditions this should not be necessary because if the user changes any of the settings, for instance the range, then automatically the new setting will be transmitted to the fish. But in some cases a command may not arrive due to unknown circumstances then it is always ok to press the "Send settings" button just to make sure commands have arrived.
Note: The commands that control the fish are implemented according the EdgeTech DF-1000 manual. But it seems that some commands are not processed by the fish at all due to unknown reasons.
It is important to know that the settings as displayed by the driver may not always represent the actual settings of the sonar fish. This is because most settings are not reported back by the DF-1000 so the driver has no means to check if commands were accepted or not. The user should check this on its own behalf, for instance if the high frequency is turned off then the data stream from that channel should stop or contains only zero data.
For more details on the settings please refer to the sonar manual.
Status info
This list shows the history of the system/connection status. Every time a major event takes place it is reported here together with the local time.