
Description
This driver can be used to interface to a C-Max CM2 Digital sidescan sonar.
It can be used to read sonar data into Qinsy and to control the operational parameters of the C-Max Sonar.
For the latter task the driver is equipped with user interface.
The sonar is interfaced to the Qinsy computer via a USB port.
When the sonar is interfaced for the first time, Windows will recognize it and ask for the driver.
Make sure to install the driver correctly. The latest driver files (INF,SYS,DLL) will be made available by the manufacturer.
NOTE: If USB driver is not (correctly) installed then the Qinsy sidescan driver will not operate properly.
Supported version
This driver only supports the sidescan sonars that use the printed circuit board (PCB) revision 8. Any older variants of the sidescan sonar its PCB may show unexpected behaviour.
Optionally the driver can operate in simulation mode for testing purposes; this will only work if the sonar system is not connected to the computer.
If the simulation mode is selected the driver will generate a staircase-like sonar signal.
Driver Information
|
Driver |
C-Max Sonar (Altitude)
|
Interface Type |
- |
Driver Class Type |
USB / with U/I |
|---|---|---|---|---|---|
|
- |
Input / Output |
Input |
Executable |
DrvL3Kleinsocket.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
System Interfacing
Interfacing Notes
The C-Max topside unit (STR) should be connected to the Qinsy PC through the USB port.
The USB driver should be installed properly.
Note
If the USB cable between C-Max and Qinsy is too long, it's possible that the data becomes intermittent.
Qinsy Config
Database Setup
Channels
The C-Max fish supports only two channels at the same time.
Make sure to define two channels, one with orientation port and one channel with orientation starboard.
The driver will assign the data based on the orientation.
Sound Velocity
The C-Max works internally with 1500 m/s.
If you select the sound velocity from unit then 1500 m/s will be used.
For better accuracy it is wise to enter the user defined sound velocity.
Note that ranges reported in the sidescan display will be slightly different from what is setup in the driver.
This is because the driver assumes 1500 m/s while the display uses the user defined sound velocity so this affects the calculated slant range of the sonar.
Qinsy Online
Online
The Controller starts the driver when going online.
The driver retrieves its last saved windows state from the registry on startup.
On startup the driver will try to connect automatically to the STR.
The connection process can take up to 30 seconds so be patient.
While the connection process is in progress the Status Info window will show the "Waiting For Connection..." message continuously.
If the system is not detected at all then this message will be generated endlessly.
The driver window looks as follows:
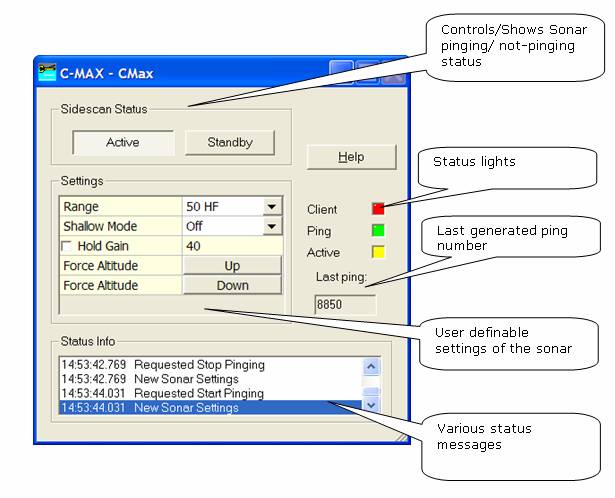
|
Sidescan status |
The active/standby buttons reflect the current status of the Sonar system.
|
|---|---|
|
Status Lights |
These status lights give the user insight into the status of the driver to STR connection. Client
Settings
If the user changes a setting, then a message is sent to the STR with the new configuration.
For more details on the settings refer to the C-Max Sonar documentation. |
|
Range |
Select operating range and frequency.
At the moment Range 200m @ 325 kHz does not work. |
|
Shallow Mode |
Enable this option if fish flies close to the seafloor, the sonar will internally start is gain curves at the ping time.
|
|
Hold Gain + Manual Gain |
Enable the hold gain option to switch auto-gain mode off and set a fixed gain curve.
|
|
Force Altitude |
Pressing the up spin button will send a command to the fish that tries to relock the altitude on a return that is shallower then the current lock-on. Pressing the down spin button will send a command to the fish that tries to relock the altitude on a return that is deeper then the current lock-on. If the spin button is depressed continuously then the respective command is continuously sent to the fish.
|
|
Decode Altitude |
It is possible to decode the altitude information reported by the sidescan sonar.
In an alphanumerical Display or the Observation Physics Display one can see the actual value of the altitude.
Note: altitude will be compensated for user defined sound velocity. |
Additional Info
Drivers IO Notes
-
CMAX : Sets the driver in C-Max mode.
-
SIMU: Places the driver in simulation mode, no actual connection to sonar system is then required.