Description
Driver to decode range measurements between an AUV and floating buoys on the watersurface and to decode the GPS positions of these buoys.
Driver Information
|
Driver |
AUV-Buoy Tracking (PARADIGM) |
Interface Type |
Serial |
Driver Class Type |
Terminated <CR> |
|---|---|---|---|---|---|
|
No |
Input / Output |
Input |
Executable |
DrvAUVBuoyTracking.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
Database Setup
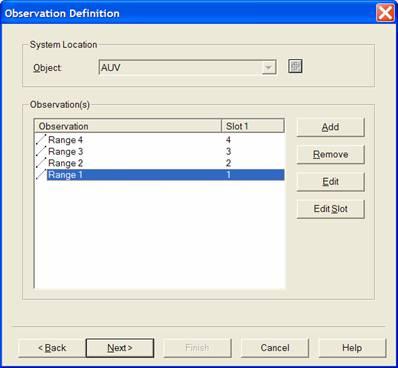
Define a range observation between each buoy (Vessel object) and the AUV (Vessel object)

The slot number must be the buoy address (decimal buoy identification number, range 1..15)
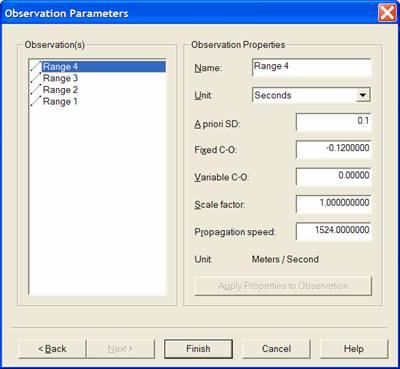
Further, the driver decodes the traveltime of the sound through water between master buoy and AUV and between AUV and the other buoys.
Therefore the user must select for each range the unit Seconds, the SoundVelocity must be entered in Survey Units / Seconds and the Fixed or Variable C-O must be used to enter the Turn-Around-Delay, also in seconds.
This Turn-Around-Delay should always be entered as a negative number.