
Description
Driver to decode GRIL NAVPOS, BASLIN and NMEA-0183 $PTPSR, ATT & $NDPPU sentences containing navigation position, baseline length and attitude information.
The three components from the BASLIN record are used to compute a 3D baseline length.
The RMS horizontal position and RMS vertical position are used to computed a 3D position RMS.
This driver can be used with models DC-201, DC-202 or the ADX Portable Pilot Unit, all from AD Navigation
Apart from reading and decoding these sentences, this driver can also send commands to the SATEL radio which is part of the receiver.
This functionality is used by the driver to select an RTK base station.
Port C - Satel Radio - cmr
Port C of the AD Navigation GNSS receiver will always be set to receive cmr corrections, in case a reference station has been selected.
A Satel 3AS / 3ASd radio is normally connected to Port C of the receiver, with SL&F commands enabled on the radio.
Driver Information
|
Driver |
AD Navigation DC-Series (Position) |
Interface Type |
Serial |
Driver Class Type |
Terminated <LF> |
|---|---|---|---|---|---|
|
|
Input / Output |
Input |
Executable |
DrvJavadSatelUI.exe |
|
|
Related Systems |
|
||||
|
Related Pages |
|
||||
System Config
System Configuration
RTK Base station selection
Before any commands may be sent to the SATEL radio some routing commands need to be sent to the receiver.
This way the input received on the port connected to the Qinsy driver is echo-ed to the SATEL radio via port 'c' and the other way around.
These routing commands are shown below:
|
Command |
Description |
|---|---|
|
QUIT1 |
Send echo off command |
|
set,cur/term/echo,/dev/null |
Echo current port to nowhere |
|
set,cur/term/imode,cmd |
Set current port to command mode |
|
set,dev/ser/c/echo,/dev/null |
Disable echo on port 'c' |
|
set,dev/ser/c/imode,cmd |
Set port 'c' to command mode |
|
set,dev/ser/c/eoff,QUIT2 |
Set echo off command to 'QUIT2' |
|
set,dev/ser/c/imode,echo |
Enable echo on port 'c' |
|
set,dev/ser/c/echo,/cur/term |
Echo port 'c' via current port |
|
set,/par/dev/ser/c/rate,19200 |
Set baud rate for port 'c' to 19K2 baud |
|
set,cur/term/eoff,QUIT1 |
Set echo off command to 'QUIT1' |
|
set,cur/term/imode,echo |
Enable echo on current port |
|
set,cur/term/echo,/dev/ser/c |
Echo current port via port 'c' |
We are now ready to send commands to the SATEL radio.
In case a new station is selected the 'Set Frequency', 'Save Settings' & 'Query Frequency' commands are sent. This will set the radio to the frequency as entered for the selected reference station, followed by a command to save the change to the memory of the SATEL radio. Finally the active frequency is read back in to make sure the change was executed without problems.
At driver initialization and during a driver reset the 'Query Frequency' command is sent unless the 'Send reference station selection on start or reset' check box is not selected by the user.
This command allows the driver to show the correct selected reference station at the driver initialization phase.
Once we are done sending commands to the SATEL radio the echoing is removed again using the following commands:
|
Command |
Description |
|
|---|---|---|
|
QUIT1 |
Send echo off command |
|
|
set,cur/term/echo,/dev/null |
Echo current port to nowhere |
|
|
set,cur/term/imode,cmd |
Set current port to command mode |
|
|
set,dev/ser/c/echo,/dev/null |
Echo port 'c' to nowhere |
|
|
set,dev/ser/c/imode,cmd |
Set port 'c' to command mode |
|
|
set,/par/dev/ser/c/imode,cmr |
Set port 'c' to CMR input mode |
Only when a reference station has been selected |
|
set,/par/dev/ser/c/imode,none |
Set port 'c' to None input mode |
Only when "--- Disable Satel Radio ---" has been selected |
|
set,/par/dev/ser/c/rate,19200 |
Set baud rate for port 'c' to 19K2 baud |
|
System Interfacing
Interfacing Notes
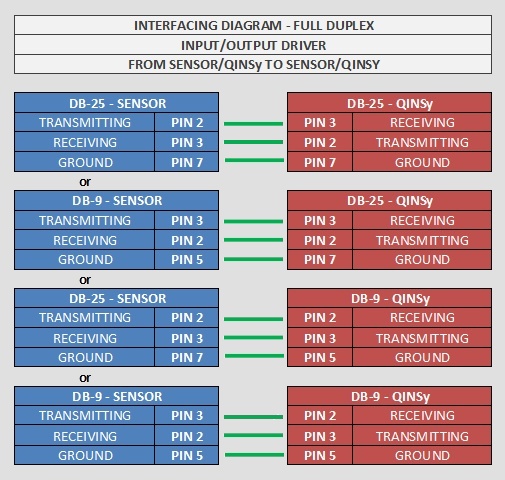
Because this driver both receives sentences from the receiver as well as sends sentences to the receiver a two-way cable is required.
The cable-wiring diagram below shows which pins should be connected:
Qinsy Config
Database Setup
All of the systems below may be combined on a single serial port.
Add a Positioning Navigation System
Select the "AD Navigation DC-Series" and set the correct communication parameters.
Add a Miscellaneous System
Select the "AD Navigation DC-Series (Quality)" and set the correct communication parameters.
Next give the observation a name.
For correct decoding you should select the following slot numbers:
|
Slot nr: |
Observation |
Origin |
|
1 |
Data link quality |
NAVPOS or $NDPPU |
|
2 |
Number of GPS satellites |
NAVPOS or $NDPPU |
|
3 |
Number of GLONASS satellites |
NAVPOS or $NDPPU |
|
4 |
Base line length |
BASLIN or $NDPPU |
|
5 |
Position SEP |
BASLIN |
|
6 |
Rate of turn |
$NDPPU |
|
7 |
Battery status |
$NDPPU |
|
8 |
Distance to RTK base station |
$NDPPU |
Add a Gyro System
Select the "AD Navigation DC-Series (Heading)" and set the correct communication parameters.
Next add a gyro observation and give it a correct name.
For the observation type select True Heading.
Add a Pitch, Roll and Heave System
Select the"AD Navigation DC-Series (Pitch)" and set the correct communication parameters.
Currently the decode is roll or pitch
Add a Speed Log System
Select the "AD Navigation DC-Series (Speed)".
Next add a Speed observation, give it a correct name and set its unit to kilometers/hour (NAVPOS) or meters/second ($NDPPU).
Qinsy Online
Online
First Time Start-up
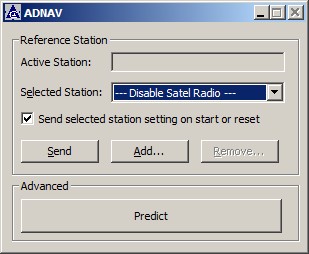
The first time on-line (on the current computer, for the current user account) the selected station will be set to Disable Satel Radio and the list with reference stations will be empty:
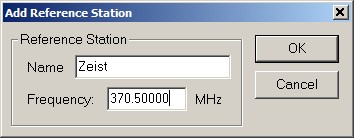
Click Add to open the Add Reference Station dialog, where you can enter the Name and Frequency in MHz.
Click OK to accept your entries.
The reference details are stored in the Windows registry, under the QPS registry key of the Current User.
With at least one station defined, a station can be selected from the list.
Send - Selected Station
The action of selecting a station from the list causes the driver to switch from the used RTK base station to the selected station and will enable Port C of the receiver to receive CMR corrections.
In case you select Disable Satel Radio, the input mode of Port C will be set to "None".
Predict Option
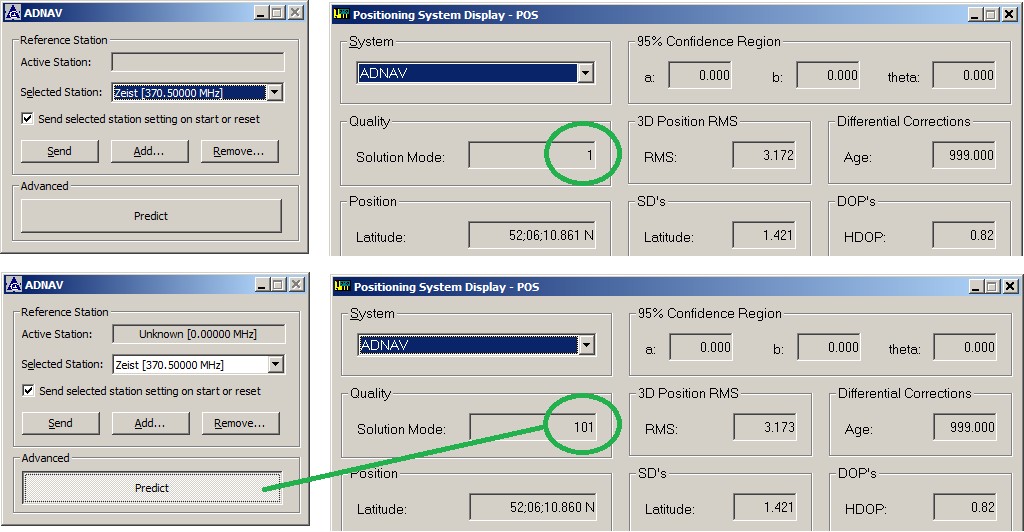
A new (Advanced) button has been added, by default labeled 'Predict'.
As soon as this button is pressed, an extra value will be added to the decoded solution mode. This offset value is by default set to 100.
Notice that the decoded solution mode can be monitored using a Positioning System Display or Generic Display (as RAW DATA, Positioning item Solution Mode).
Typical usage:
A user may use the solution threshold in the Computation Setup to start predicting when the solution exceeds a user-defined value. Now, when sailing, the user may press the Predict button, just prior to going under a bridge, so Qinsy will start predicting immediately.
When sailing away from the bridge, i.e. RTK is fine again, the user may release the Predict button.
An advanced user may change the default offset value of 100 by modifying registry key "HKEY_CURRENT_USER\Software\QPS\QINSy\8.0\Drivers\DrvJavadSatelUI\<Systen Name>\Settings\PS_CalcModeOffset".
When this value is set to zero, then the new button will not be visible at all in the driver's dialog.
Further, the default button label "Predict" may also be changed by modifying registry key HKEY_CURRENT_USER\Software\QPS\QINSy\8.0\Drivers\DrvJavadSatelUI\<Systen Name>\Settings\PS_ButtonLabel".