
On this page:
Configuring Raw Datagram Output
The required datagrams must first be enabled for output in the manufacturer's system control software. The following tables list the datagrams needed.
Reson 8K-Series (Serial)
|
|||
|
Seabat 900x, 8101, 8111, 8125
|
|||
|
Application |
Bathymetry
(0x14-0x18) |
Snippet/Seabed Image |
Water Column |
|---|---|---|---|
|
FMGT |
N/A |
N/A |
N/A |
|
FM Midwater |
N/A |
N/A |
N/A |
|
XTF Export |
|
N/A |
N/A |
|
GSF Export |
N/A |
N/A |
N/A |
To activate data storage see Driver Specific Settings below.
Note
The driver will automatically detect the input format, but will only decode R_THETA or RI_THETA packets and SNP0/SNP1 packets
Info
-
Please refer to the Reson 8xxx/9000x documentation for Datagram format descriptions identifying which parameters are stored in each data packet type.
-
Please refer to the Drivers Manual - Reson Seabat 81xx-900x (Serial) for system driver and Qinsy configuration details. (Link only available when logged in to the QPS website.)
Driver Specific Settings - MB System Wizard Page 2
Reson Seabat 81xx/9000x (Serial)
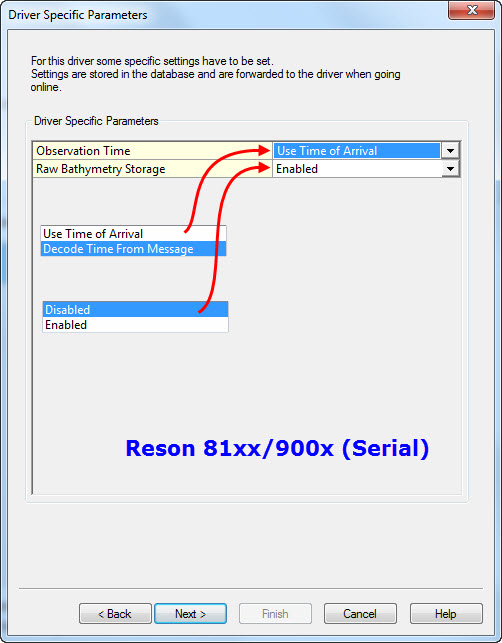
Select the driver specific settings. These supersede the command line parameters.
The following settings are selectable:
|
Setting |
Option (bold=default) |
Description |
|---|---|---|
|
Observation Time |
Use Time Of Arrival/Decode Time From Message |
Supersedes PPS 'Drivers.io' option.
If set to "Decode Time from Message" then the timetag field in the Seabat data string will be used as observation time of the multibeam data. There are some rough checks on the timetag, i.e. it must not be 0 and be within 5 minutes of the QINSy pc time. If these fail, then the QINSy pc time is used as described above. Note that the Seabat topside needs to be synchronized with UTC time when this option is used. |
|
Raw Bathymetry Storage* |
Disabled/Enabled |
When Enabled the Raw bathymetry (e.g 0x17, 0x18) packet is stored in the QINSy database for XTF export purposes and usage in Fledermaus. This setting supersedes the old XTF option. |
*) The decoded raw multibeam data is also stored, so by enabling Raw Bathymetry Storage the Database will grow larger.
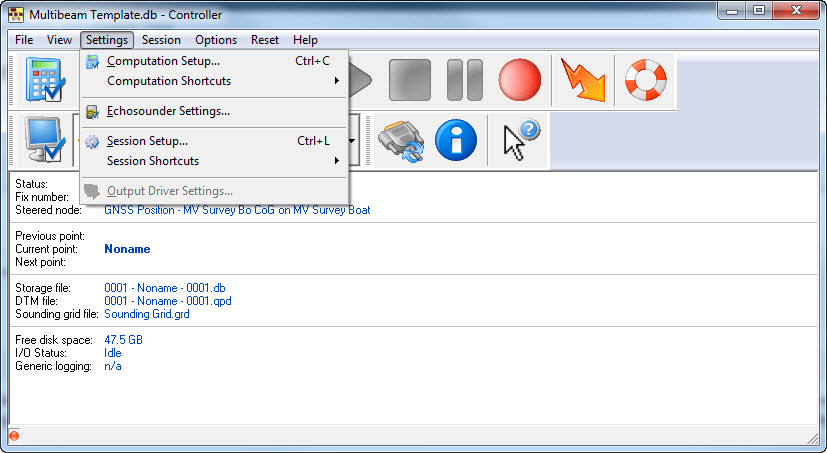
Online Settings
Additional settings are required in the QINSy Online Controller to ensure the correct sonar data is recorded. These are found in the 'Settings' menu.
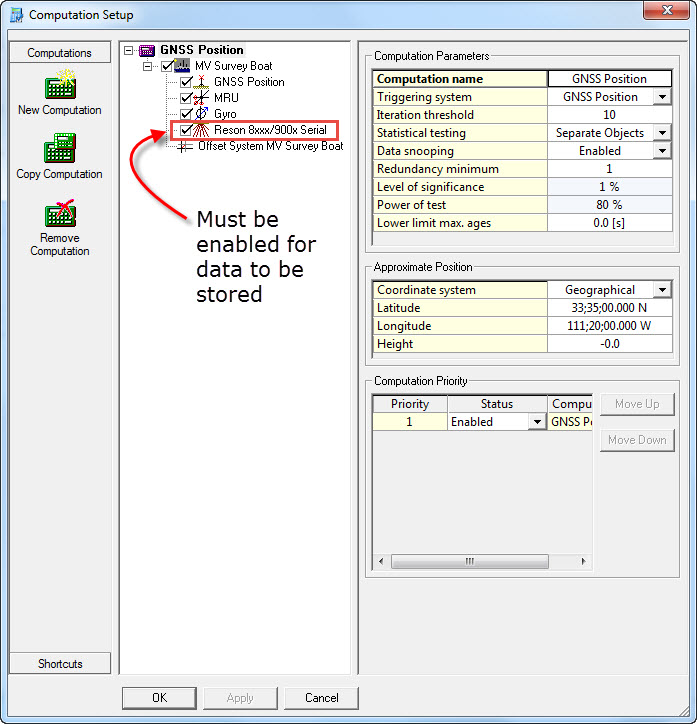
Computation Setup
Make sure the Multibeam System(s) is enabled in the 'Computation Setup'.
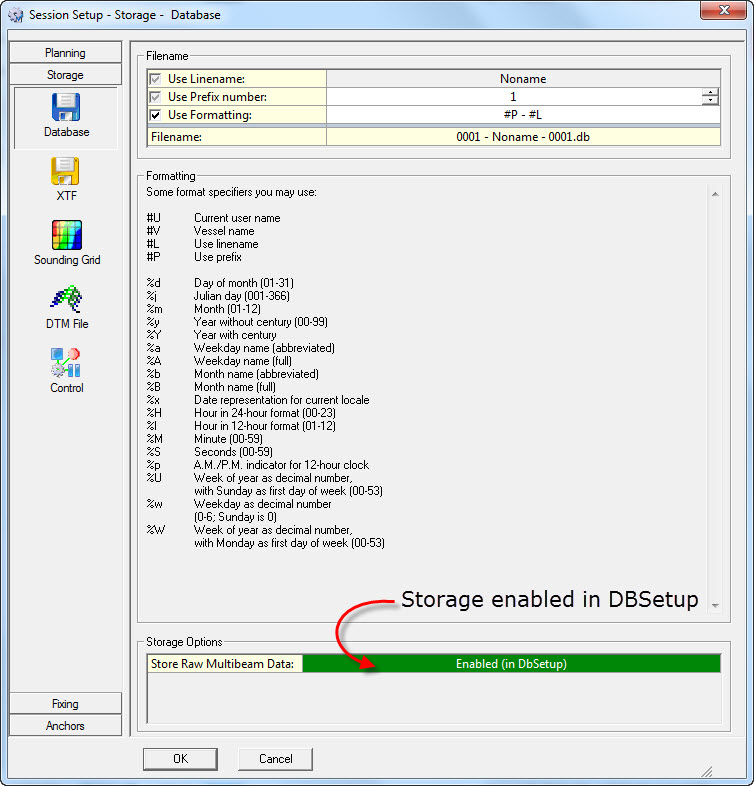
Session Setup - Storage
From the Controller Settings menu select Session Setup. In the left panel of the window that opens select 'Storage'. Data can be stored to various file formats.
Database File (*.db)
Click on 'Database'. At bottom right, sonar Storage Options are listed. Only those systems which were enabled in DbSetup while configuring the template database are shown here. If not shown, go back to DbSetup and check the Multibeam System definition.
Real time export of XTF files
Storage Mode:
Select Enabled as the storage mode.
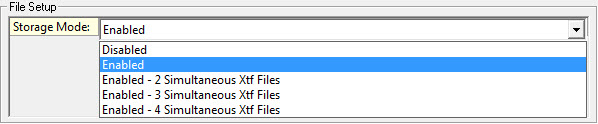
If there are multiple Multibeam or SSS systems defined in the Template database it is possible to create multiple XTF files. Please consult the online Help for more information.
When a single XTF file is used the file name is the same as the associated database (*.db) file except that the extension is 'xtf'.
If multiple XTF outputs are enabled the file name is the same as the associated database (*.db) file but the XTF file extension s are 'xtf1', 'xtf2', 'xtf3', 'xtf4' .
Settings for XTF
Select the XTF Sonar Type. This information will only be written in the header of the XTF file, it doesn't influence the data itself. So when the system is not in the list, 00 - Default can be chosen.
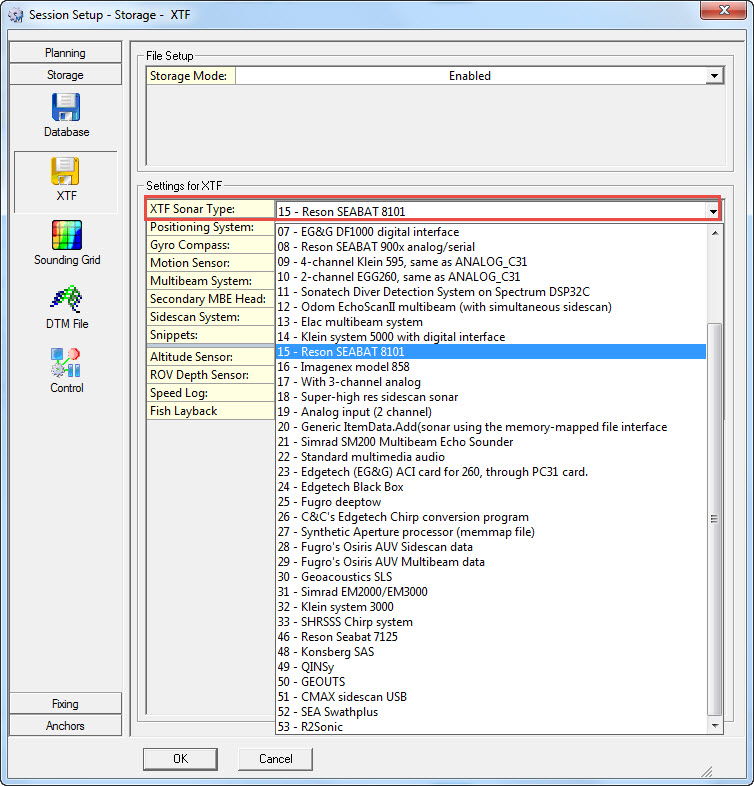
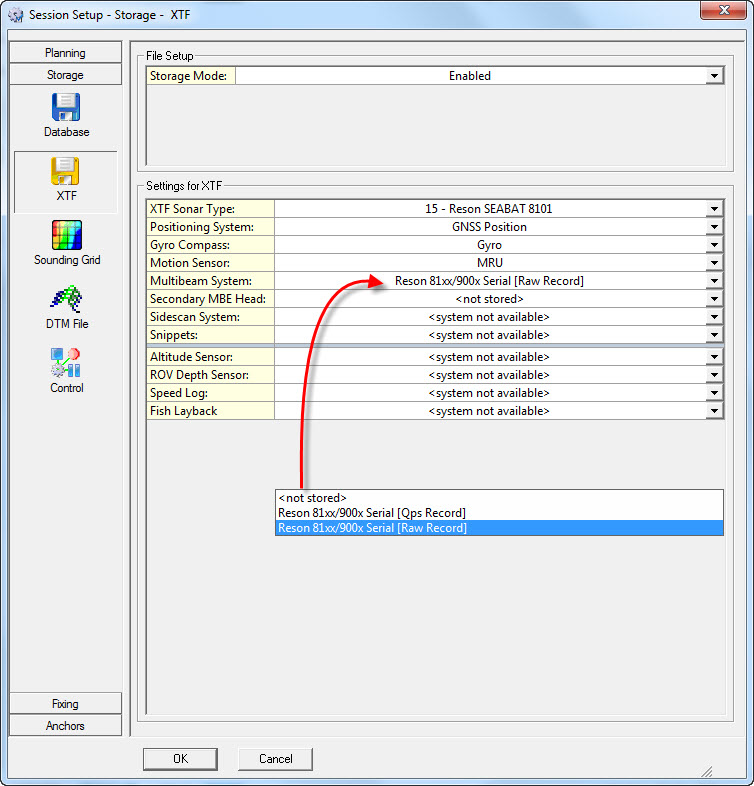
Select all the Systems to be stored in the XTF file. For Multibeam System (and Secondary Head if applicable) select the type of record to store.
[Qps Record] System stored in Qps Multibeam record 28. Data drawn from decoded fields in a proprietary data container.
[Raw Record] System stored as raw. Data drawn from raw packets.
As a reminder of the difference between 'raw' data and 'non-raw' data click here to return to the main page 'Howto Raw Bathymetry and Imagery Data'.
The format contains some generic record types for which the internal QINSy database records can be translated directly to XTF records. For these records the storage of raw data blocks is not required.
For example: Position (XTF_HEADER_POSITION 100), Attitude (XTF_HEADER_ATTITUDE), QPS SBE(26), QPS MTX(27), QPS MBE(28), Sidescan Sonar (0).
However, most record types as specified in XTF are the original raw records being transmitted by a multibeam echosounder, e.g. raw Reson bathymetry packets.
Position and attititude / heading are stored in record type XTF_POSITION and XTF_header_attitude respectively. The other sensors are stored in various fields (XTF_PING_HEADER).
The XTF files is stored in the \Database sub-folder of your current Project folder.
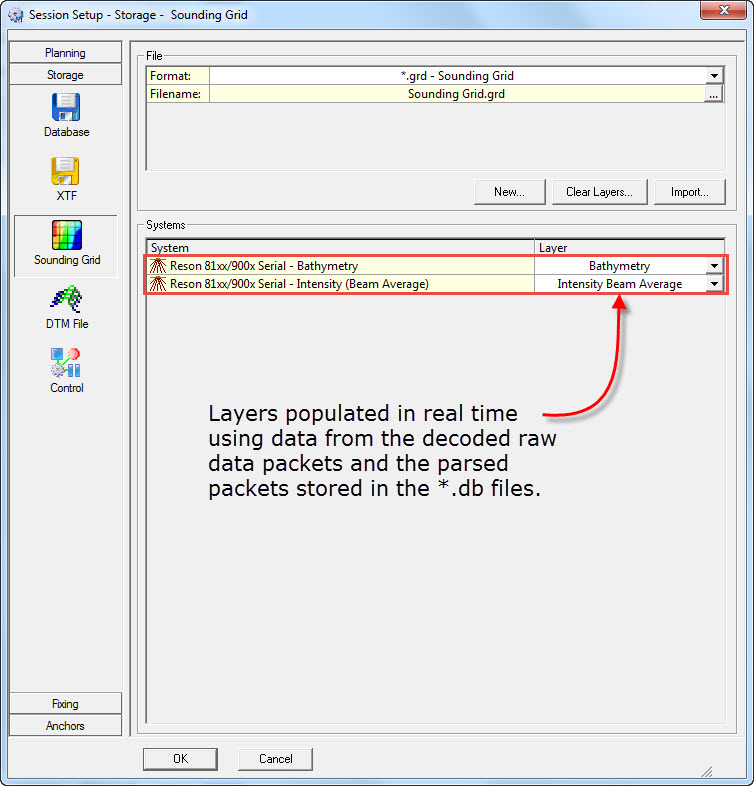
Real-time Sounding Grid
For real-time visualization of bathymetry and sonar imagery, or to produce a gridded dataset on-the-fly as end DTM product, ensure that the different data types are enabled and stored to separate layers in the sounding grid.
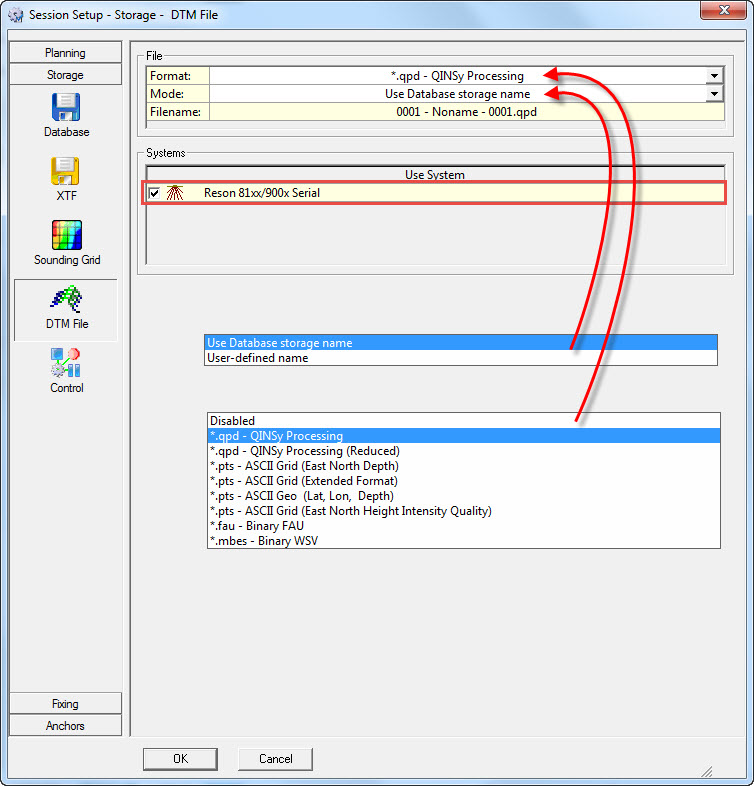
DTM File
DTM data is motion and heading corrected geo-referenced footprint data from an echosounder (multibeam, multi-transducer or singlebeam) or laser scanner system.
Various storage formats are available for output, ready for import into processing software (Validator, QLOUD, Fledermaus), or other third party programs (Terramodel, CARIS, Cyclone, etc).
|
File |
|
|---|---|
|
Format |
Select one of the supported formats from the pull-down menu:
|
|
Mode |
The mode determines the name of the storage file:
|
|
Filename |
A preview of how the file name will look. |