
On this page:
Voting System Implemented
KeyTypeSummaryVotes
Geoid Model Migration Tool
In Qinsy it is possible to use User Defined Geoid Models. In QINSy 8 these models we referenced in a GeoidModels.XML file.
With the implementation of the EPSG support in Qinsy 9 we upgraded all the models that are distributed with Qinsy 9 and those distributed in the QPS Geodetic Package 3.0.x with a WKT file.
We could not just upgrade the User Defined Geoid Models as it was difficult for users to always configure them properly, which could result in a WKT file with incomplete or incorrect settings.
Users had to contact QPS Support to transform their User Defined Geoid Models.
We now offer a Migration Tool that will allow you to do this yourself:
In the above example Euref89 was set in the GeoidModels.xml instead of ETRS89. The tool allows you to set the correct datum on which the Geoid Model is applicable.
Please make sure to restart Qinsy before you are going to set up your geodetics.
For "Relative" models (MSL to LAT correction, for example) you can select the Source Vertical Datum (MSL) on which the relative correction is being applied.
These settings will allow for better filtering of relevant models in the future and better Geodetic Information transfer to GIS systems, for example.
For more information on Geoid Models please refer to:
-
How-to Use the Geoid Model Migration Tool
-
Geoid Model Glossary
-
How-to Create a Geoid or Vertical Offset Model (v9.0 - 9.2)
-
How-to Update Geoid Models.xml
-
QPS - Geodetic resources 3.0.3 - Release notes (if you want to know which models are included in that installer)
Displays
3D Point Cloud - Static Objects
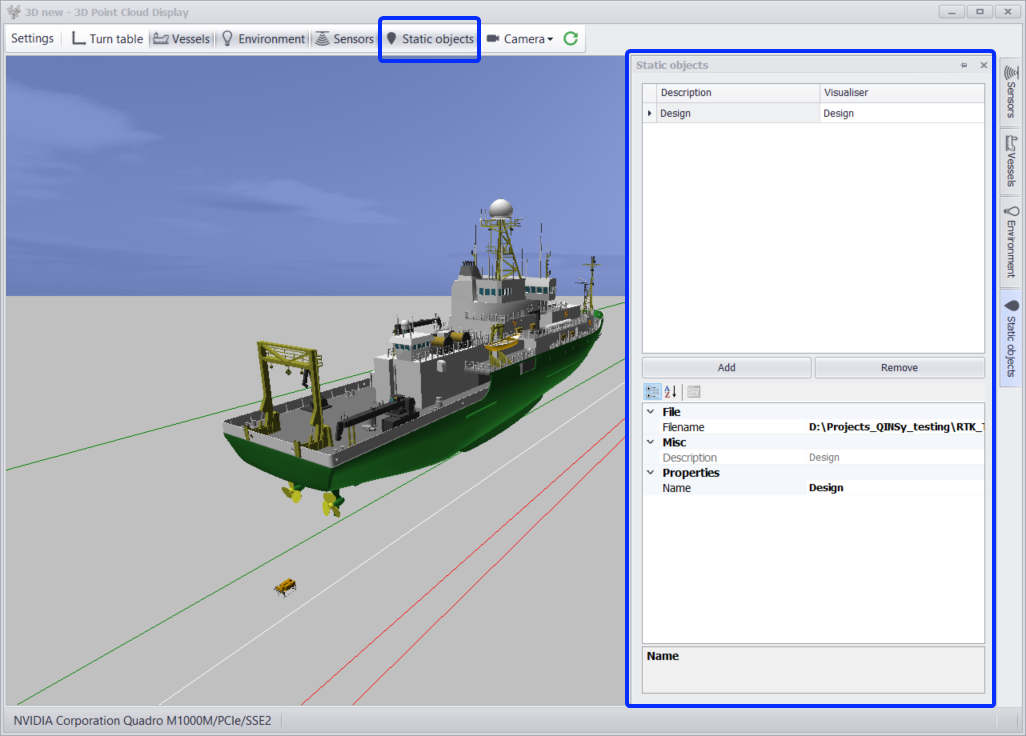
The display now supports Static Objects to be added to the display. This increases the value of the display from a situational awareness point of view.
The following file types are supported:
-
3Ds Max (*.3ds)
-
Wavefront (*.obj)
-
Lightwave (*.lwo)
-
AC3D (*.ac)
-
QGF files (*.QGFline, *.QGFdes, *.QGFback)
Multiple objects are now supported and will be shown from the first available computation result.
Alert - MBES - Support Bathy, Snippets and Water Column
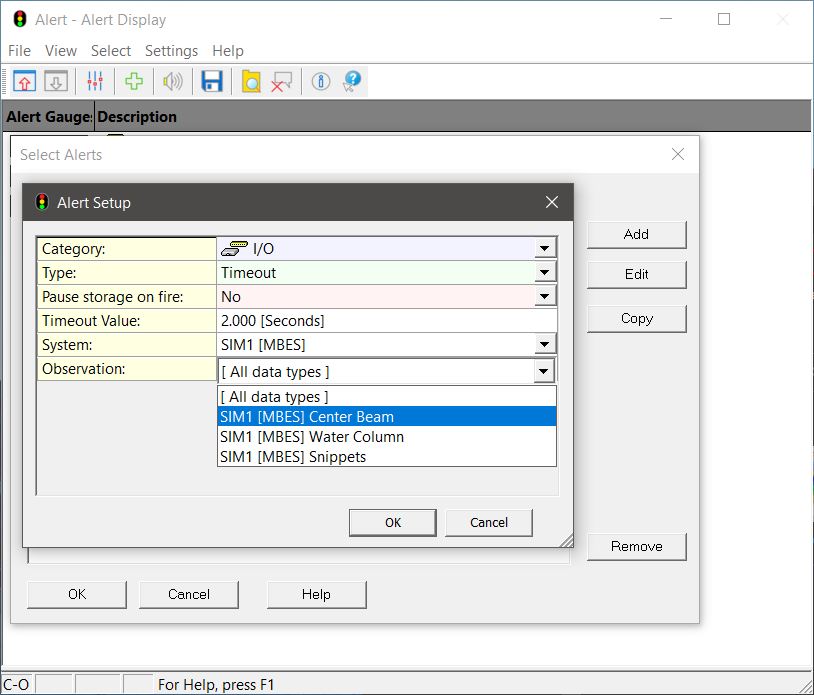
These settings allow for the monitoring of various items within one package.
Drivers
Innovatum Smartrak cable tracker

We have refactored and upgraded the existing driver to support the new Smartrak Output String V2.1 (extended format).
The new Smartrak Data Output String v2.1 has three additional sensor values (at the end of the string) and a version number.
The driver has been extended to support additional:
-
USBL observations
-
Magnetometer observations
-
Miscellaneous Generic observations
Support for storing the entire data string as Raw packets has been added to facilitate enhanced cable tracking/processing.
The USBL observation can be used to position and display the detected cable/pipe in the following displays:
-
Navigation Display
-
Profile Display
-
3D Point Cloud Display
-
Time Plot Display
-
Generic Display
The driver will now convert the decoded Magnetization field (unit nano Tesla) into micro Teslas so the value will be stored internally as micro Teslas.
This is following the 'Qinsy design' of dealing with magnetic observations.
The Magnetometer observations can be visualised in the following displays:
-
Navigation Display
-
Showing the data in a sounding grid
-
-
Time Plot Display
-
Generic Display
For further details please refer to:
Klein Marine Systems 4000 sidescan system

Klein’s next generation Single Beam Side Scan Sonar is purpose built to meet the demanding requirements for long ranges, deep-water operations and optimized shallow water performance.
It is now supported by Qinsy beside the already wide range of long time supported Klein Marine Systems.
For further details please refer to:
Klein Marine Systems 4900 sidescan system

The Klein System 4900 is a versatile Dual Frequency Side Scan Sonar that can be used for many different survey and for search and recovery applications.
The system employs both a user selectable CW pulse transmission mode, advanced broadband CHIRP signal processing technology and is by default supplied with heading, pitch, roll & depth sensors.
We would love to receive some of your recorded survey data.
For further details please refer to:
Klein Marine Systems MA-X View 600 sidescan system

The MA-X VIEW 600 side scan sonar is an integrated single beam side scan and gap filler sonar, which aims to reduce your survey time and increase your survey coverage.
Are you ready to use this with Qinsy 9.3.0?
For further details please refer to:
Kraken SeaVision laser system
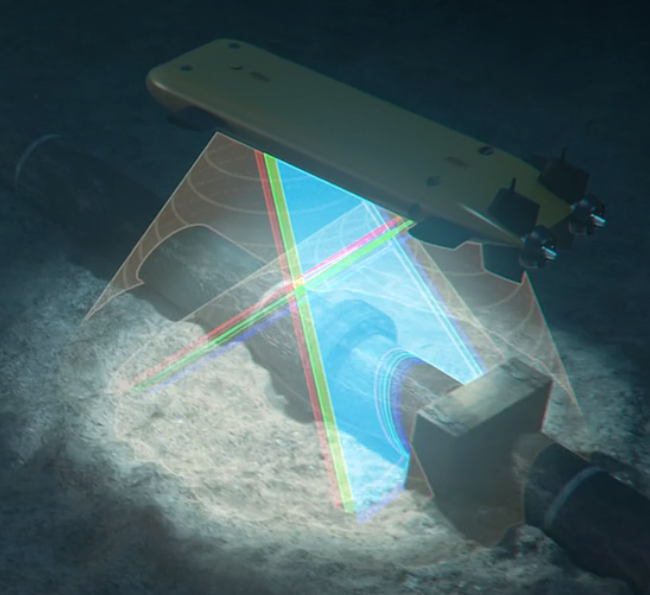
Terrestrial Laser Scanners (TLS) are already a common thing, but underwater laser scanner is a new game in play.
The Kraken SeaVision underwater laser system can now be interfaced via the LAS format.
For further details please refer to:
Teledyne Odom ECHOTRAC E20 singlebeam system

We added a driver for the Odom Echotrac E20 to extend the Odom product support. (Note that previous models are nearing their end of Sale date.)
The driver now uses the Teledyne S7K protocol from the Echotrac E20 and decodes:
-
Depth below Transducer
-
Draft
-
Sound Velocity
-
Heave
-
Time Synchronisation system used for time stamping the data
-
Water Column Data / Echotrace Data (recording only, it is not displayed)
For further details on how to set it up with Qinsy, please refer to:
Online
Job Number
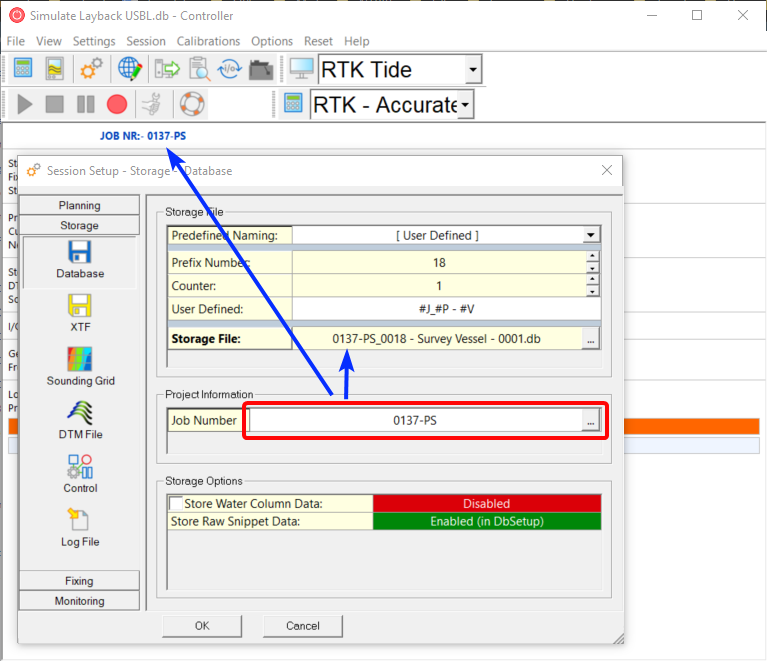
You can set a job number (see movie) in the Session Setup and in the Console which can be used for:
-
Naming of DB and QPD files
-
Generic Editor
-
Console (label)
-
Generic Displays
-
Generic Logging
-
Generic Output
-