
On this page:
Multi-vessel coverage monitoring
Functionality has been added that makes it possible to share Qinsy multibeam data with other Qinsy instances.
This increases the versatility of Qinsy and can be used in a variety of use cases.
Example use case are:
-
A crewed vessel working together with an autonomous or uncrewed vessel
-
Remote monitoring of multiple vessels
-
A number of vessels sail close together and achieving a mega wide coverage
The data is transmitted from one Qinsy instance to another Qinsy instance where it can be used for QC purposes, such as coverage monitoring or creating a sounding grid that combines all data.
The Qinsy instance that needs to share its data needs to enable the DTM Socket Output option. The bandwidth that this DTM output uses is minimal compared to other data sharing options.
On the receiving instance of Qinsy, a driver for position and multibeam needs to be configured that will use the DTM output.
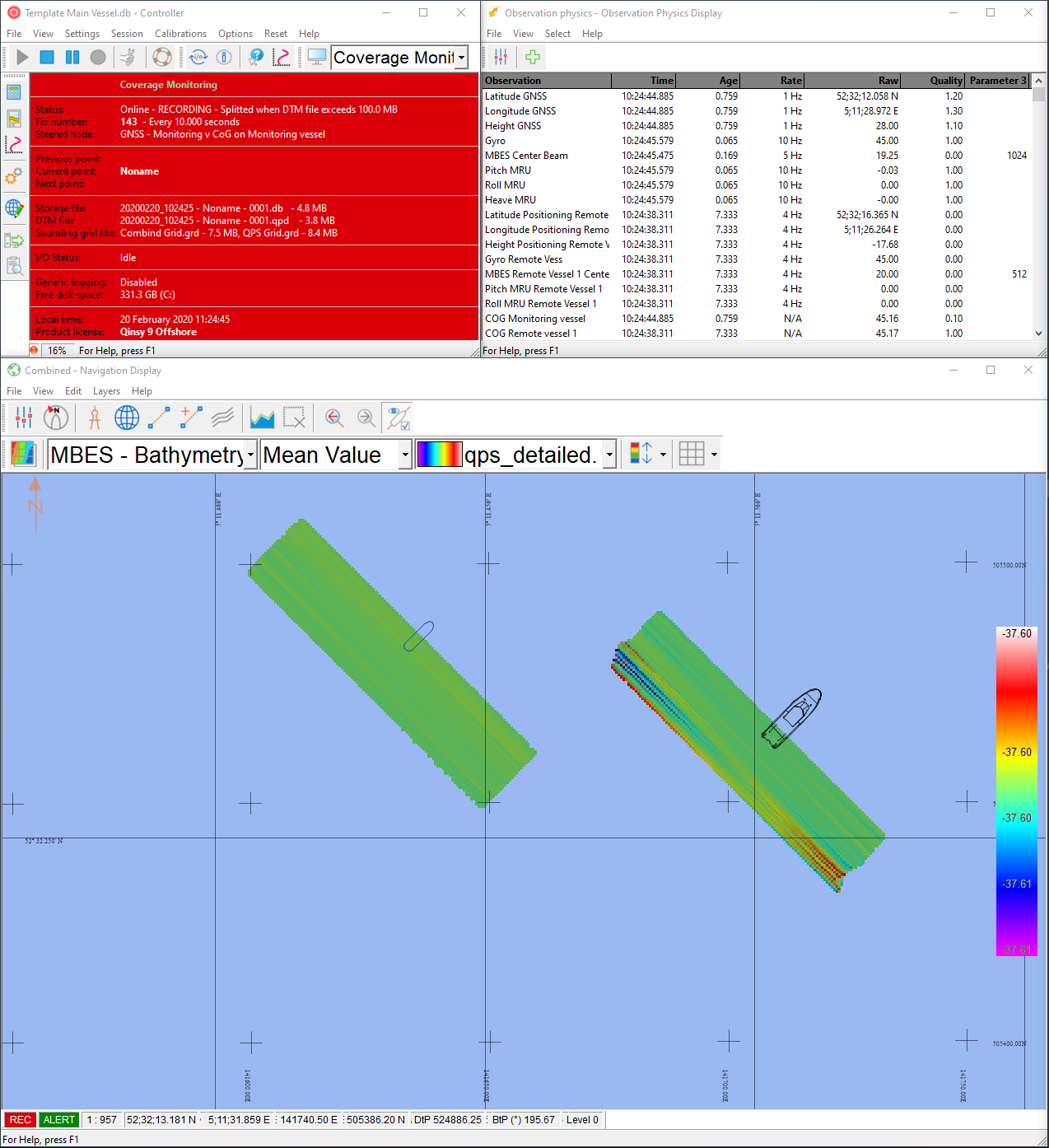
Driver information can be found at: Network (UDP) - QPS Binary - Coverage Monitoring (UTC) - 12
Tip: use the Navigation Display's two grids option so that it is easy to create two grids, see below.
Show second grid in Navigation Display
In this version the option to show a second grid in the Navigation Display has been added.
This is a further improvement on the functionality that was released in 9.2 where it was possible to log to two grids at the same time.
This allows, for example, to use two grids with a different grid cell size at the same time.
The functionality can be used for different use cases, for instance when different sensors are used in different grids and can be taken into a different processing flow.
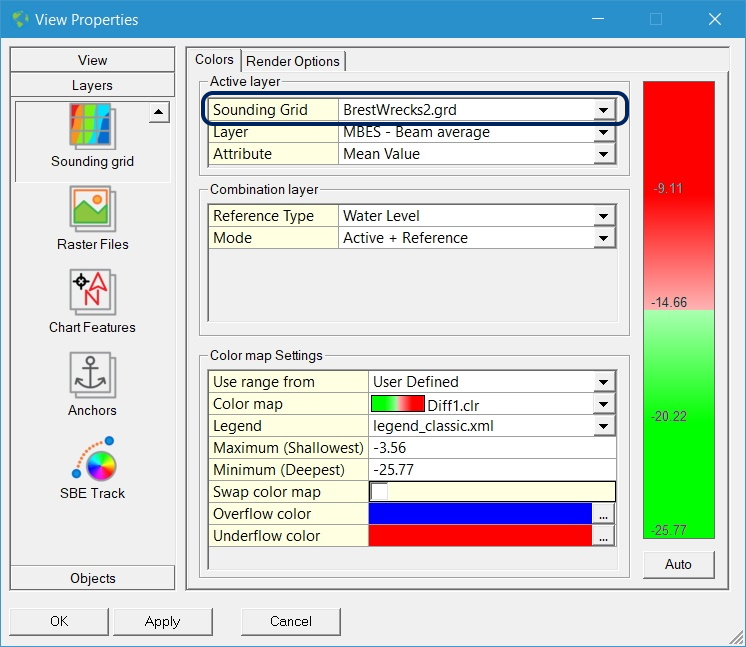
The user can select which of the two grids should be shown in the Navigation Display and with which attribute.
In the View Properties menu, the Sounding Grid can be selected:
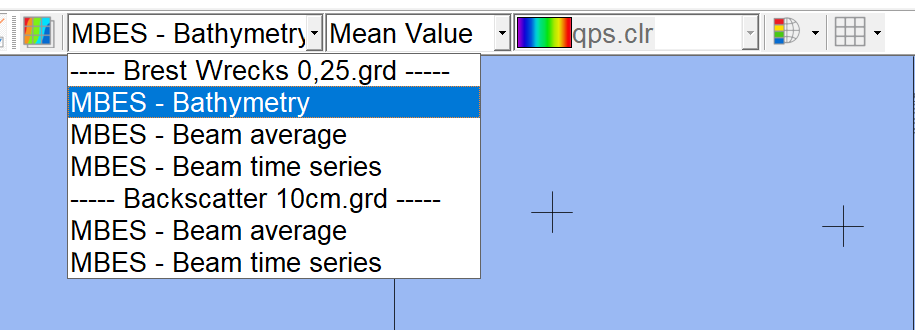
The Sounding Grid toolbar offers the option to select the grid and layer directly from the dropdown list:
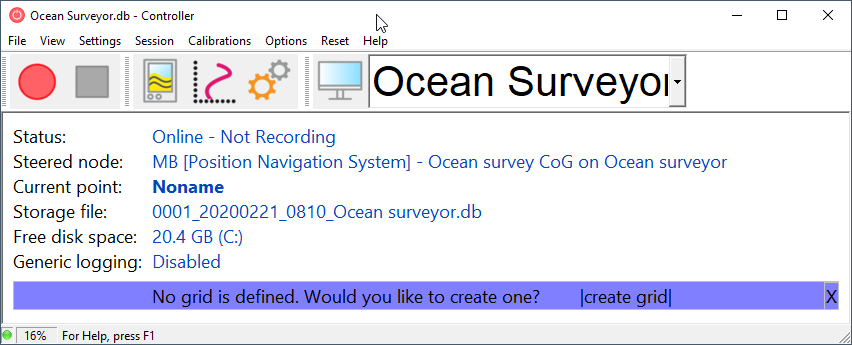
Online guided setup for grid
This new feature guides towards setting up a grid which makes it easy to find the grid setup location.
When no grid is defined this is shown in a purple bar and from there the grid dialog can be opened.
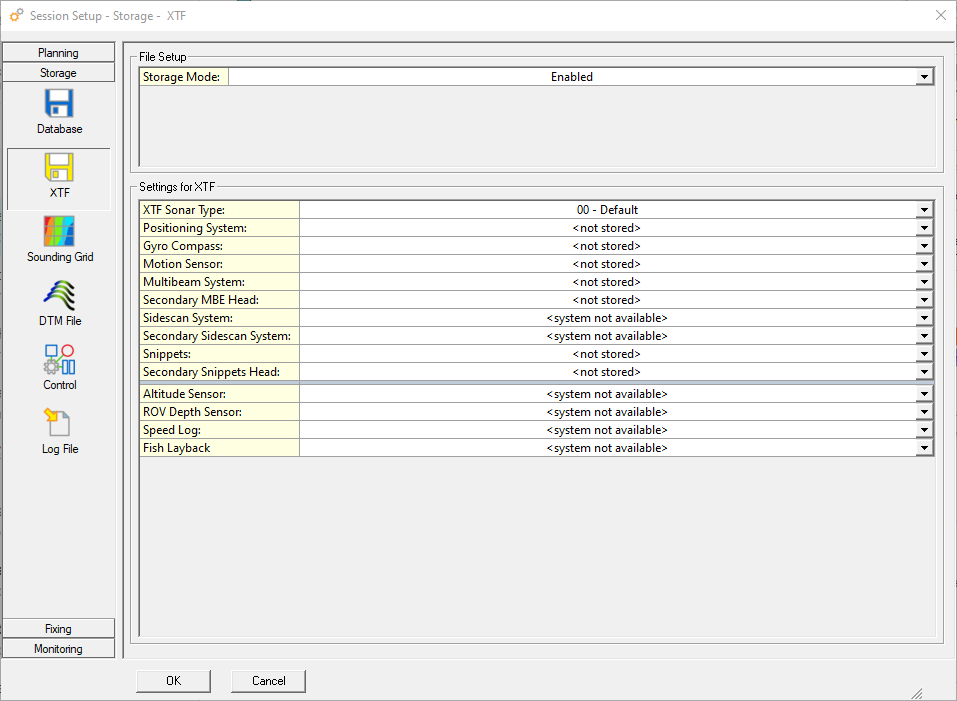
Online XTF storage
It is now possible to store all data from a dual head multibeam system in one XTF file.
The sidescan and snippet data from a second head can now be selected.
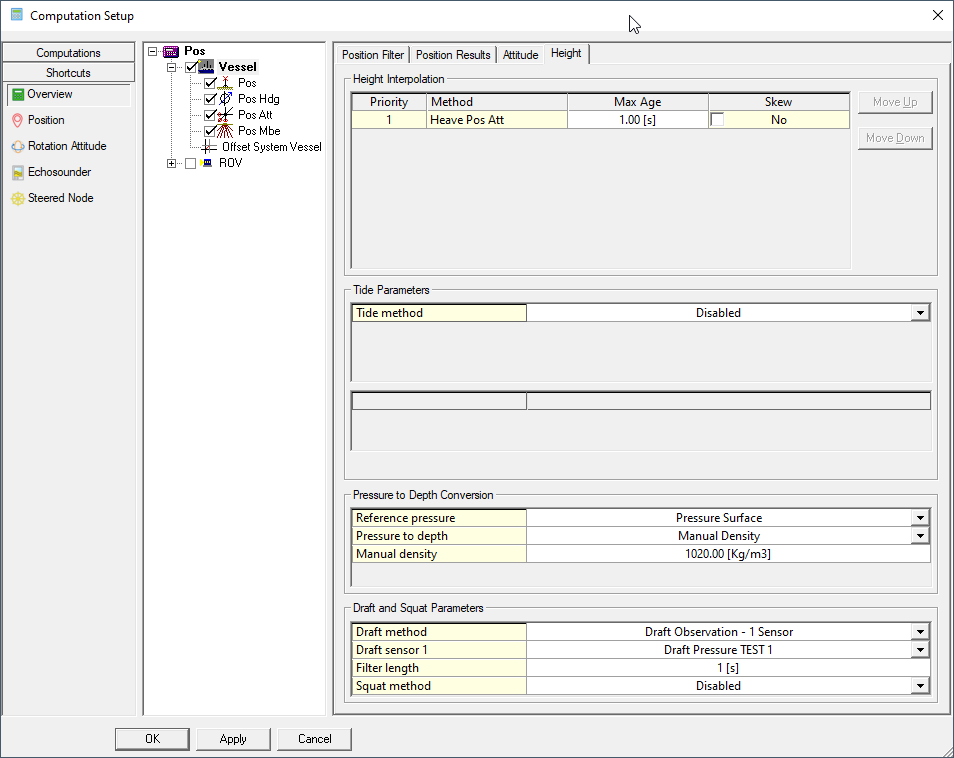
Use a pressure sensor as source for draft
It is common that on larger vessels there are draft and pressure sensors available to get an accurate actual draft of the vessel.
Using these sensors in Qinsy has the benefit that the waterline can be calculated and can be used as a reference, for instance for the depth of an ROV.
It is now possible to also use pressure sensors directly in Qinsy in addition to draft sensors. The setup is done in a similar way to how pressure sensors are used on ROVs or AUVs.
The values can be filtered over a period of time. The settings can be found in the Computation Setup under the Height tab for the vessel.
Note: Make sure to select the correct unit the sensor is providing in the setup (Bar, Pascal, Psi, Atm).
Upload data to GISGRO
GISGRO is the Online 3D Asset Management Platform by Finnish high-tech company VRT Finland.
The integration in Survey Manager provides hydrographic surveyors an easy way to share the complex 3D data with their clients, who can gain major benefits by further sharing and utilizing the data in their daily operations.
In the Survey Manager, there is now an option to upload point data to this platform.
Select the QPD files in Survey Manager and from the Export menu use the option 'Share online' (GISGRO).
The 'Share online' option provides options to log in or start a trial:
More information on GISGRO can be found at https://www.gisgro.com
Drivers
Farsounder (Forward Looking Sonar)
This is a driver for 3D forward looking sonars manufactured by Farsounder. These systems can measure 3D sonar data in front of a vessel, typically used for safety of navigation.
The data is used in a similar way to a multibeam in that it can be used to update a grid and store the result data in a QPD.
The system can also identify in-water detected objects that can be used in Qinsy as targets.
More information can be found in the drivers help:
- FarSounder (Forward Looking Sonar) Bottom Detection - 20
- FarSounder (Forward Looking Sonar) Object Detection - 20
Tip: use the date attribute for a grid and update the grid with newer data when available.
Advanced Navigation Subsonus ANPP
Driver to decode data from a Subsonus USBL/INS underwater acoustic positioning system using the manufacturer's own Advanced Navigation Packet Protocol (ANPP) stream.
The following data can be decoded and stored from the packet protocol stream:
-
USBL xyz
-
USBL targets
-
Positions
-
Heading
-
Motion (roll and pitch)
-
Sound velocity
-
Velocities, Accelerations and Rotations
-
Metadata (status flags, temperature, pressure, etc.)
More information in the drivers help: Network (TCP) - Advanced Navigation Subsonus ANPP (Position) - 12
iXblue STD Bin
This is a driver with user-interface in order to send and receive messages from an iXblue INS that supports the STD BIN protocol.
During normal operation the INS will establish an accurate position for the ROV based on the integration of Inertial, Doppler, USBL, Depth Sensor and Surface Positioning (Computation Node Result) information.
This driver can send the necessary surface positioning information to the INS in order to enhance the INS solution.
At the same time it will read and decode the integrated accurate ROV position and attitude data, which can be used in a separate Computation.
There are 3 versions of this driver:
-
Serial
-
Network - TCP
-
Network - UDP
More information in the drivers help: iXblue Std Bin (UTC) - 12
Waypoints - Route Exchange (RTZ)
Driver for outputting waypoint co-ordinates (single targets, single lines, or pipelines) to route the Exchange Format (RTZ).
It is a driver with a user interface and therefore it is always present in the Windows task bar when on-line.
The output can be triggered manually or automatically.
More information in the drivers help: Waypoints - Route Exchange (RTZ) - 15
Support for Australian AUSGeoid2020 Geoid model
A new Geodetic package is available for download that includes the Australian AUSGeoid2020 Geoid model.
This package can be used with Qinsy 9.X and 8.18.X. It can also be used with Qimera 2.X and Fledermaus 8.X.
Scroll down to the bottom of the Qinsy Download page to find the 3.0.2 Geodetic package. https://qps.nl/downloads/qinsy/
Or use the direct download link: http://publicdownload.qps.nl/General/QPS-Geodetic-Resources-3.0.2-Win.msi
List of Implemented Feedback Features
KeyTypeSummaryVotes