
How-to AUV
General
This How-to document serves as guideline to work with an Autonomous Underwater Vehicle .
When working with an AUV, Qinsy is used for acquisition of the data. External software packages are generally used to plan and execute the missions, or to control the various hardware components.
These packages will send the data from the system to Qinsy.
This document is based on a Saab Sabertooth Hybrid AUV, but can also be applied to other vessels.
On this page:
Typical AUV Missions
There are two typical AUV missions: shallow water missions and deep water missions. The main difference between these two missions is how to obtain positioning data.
Shallow water mission
The procedure for a shallow water mission is a little different from the procedure for a deep water mission. The AUV has the possibility to surface once in a while, so it is not necessary to mobilise a USBL or LBL system for the positioning.
However, it is very important to surface the vessel, especially when a wreck investigating is done and a specific pattern is sailed with turns. Every system has its errors, so also the INS, which has its drift.
It is advised to surface the vessel before an investigation (like a wreck), when lines with overlap are done. A larger drift can occur when the system does multiple turns in a very short time.
A GNSS system will feed the AUV with positioning data when the system is surfaced. When the AUV is below the water, it will continue on its INS system. The GNSS will receive new position data, and the drift error will become smaller.
It is advised to surface the vessel before the investigation and after the investigation. It is possible to smooth the vessel track afterwards with a Kalman filter or by Post-processing. More about this can be found at the page 'How-to AUV - Replay/Processing'.
Deep water mission
It is desirable to keep the vessel near the sea bed during deep water missions, and not to surface once in a while like for the shallow water missions.
For deep water missions, a USBL or LBL system will be mobilised so that the AUV will obtain accurate positioning while under water.
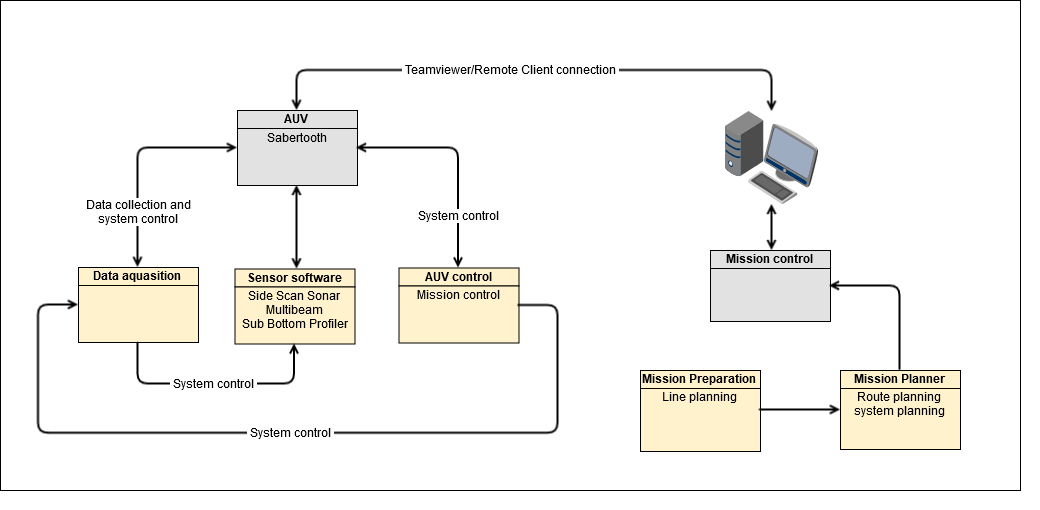
System overview
Index