
Network
-
Network (TCP)
Format
-
Hydro-Tech Hytem Data and Control Command Format Version V1.0.5
Timing
-
PPS
-
To use the timestamp in the message.
-
Without a timing system or PPS time of arrival is used.
-
System type
-
Multibeam Eshosounder (20)
Description
Driver to decode the data from Hydro-Tech systems.
The driver can provide Bathymetry, Side-scan, position, heading and attitude data.
Supported Models: MS400P, MS400U, MS8200, MS8240
Please contact QPS in case you need support for the other Models.
Unknown Attachment
Driver Information
Click to expand...
|
Interface type |
TCP |
|---|---|
|
Yes |
|
|
Input / output |
Output |
|
Related Systems |
|
|
Related Pages |
|
Decoding Notes
System Setup
Click to expand...
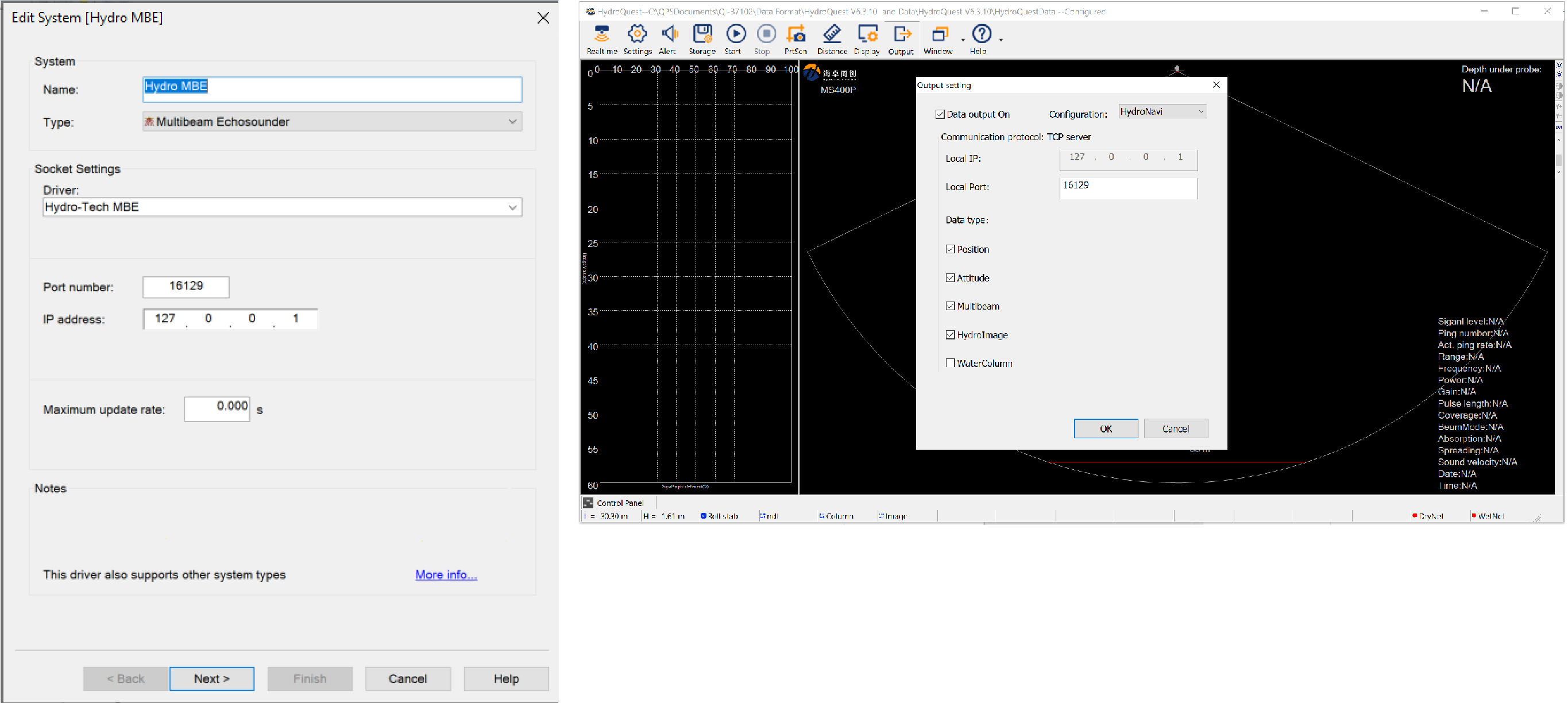
Driver receives data from Hydro-quest running on the same pc.
Default network communication settings for the different protocols:
Data: (TCP) IP: 127.0.0.1 Port: 16129
Device control settings: (TCP) IP: 127.0.0.1 Port: 16128
Stop command: (UDP) IP: 127.0.0.1 Port: 16130
These are the default settings. They can be changed in Hydro-quest software, when these are changed they need to be matched in the Db setup in Qinsy.
Qinsy Database Setup
Click to expand...
In the Qinsy setup the correct systems need to be added to receive the data from the Hydro-tech sonar.
When adding the first system the port and IP address need to be set, these will automatically carry over to other to the other systems that are added after this one.
The port and IP address need to match those set in Hydro-quest as seen in the system-setup.
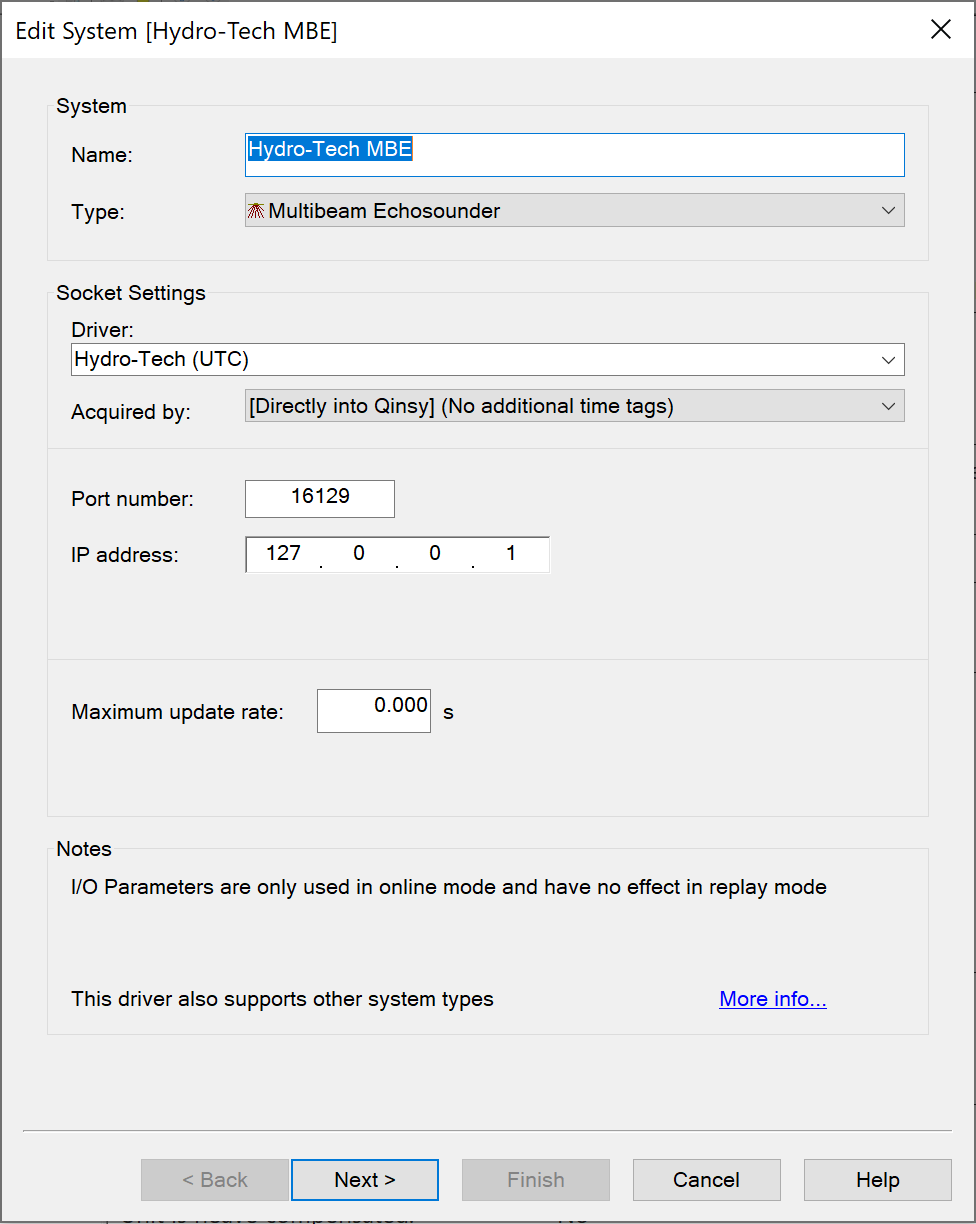
When finishing adding the first Hydro-Tech system the database setup will automatically prompt you to add the next Hydro-Tech system.
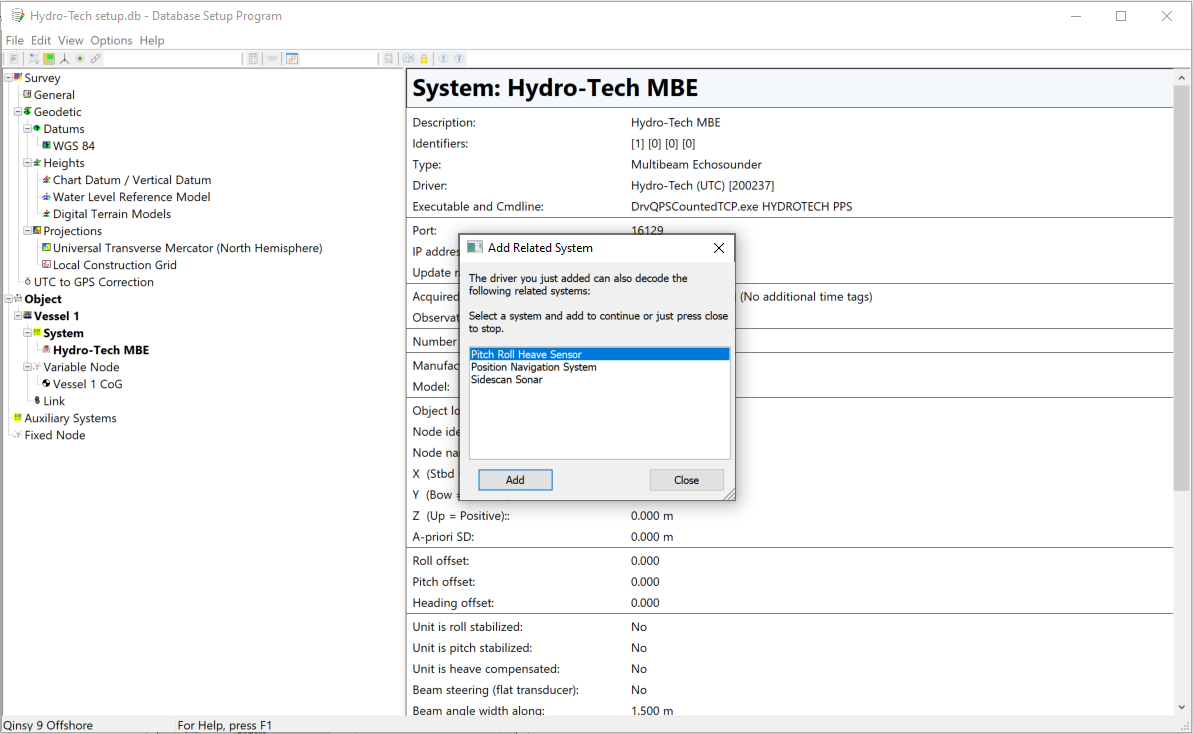
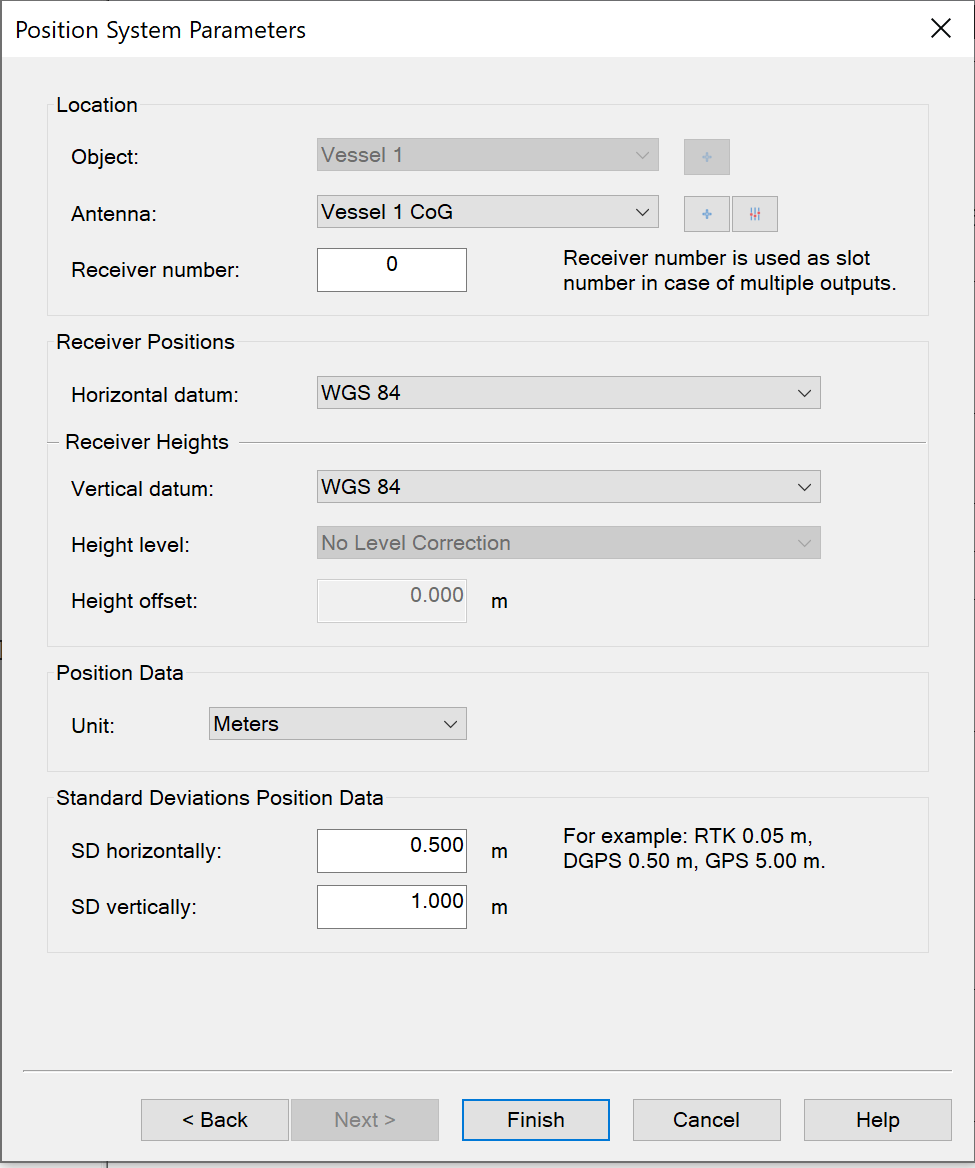
For the positioning system the antenna node, horizontal - & vertical datum needs to be set, the rest of the settings should be correct by default.
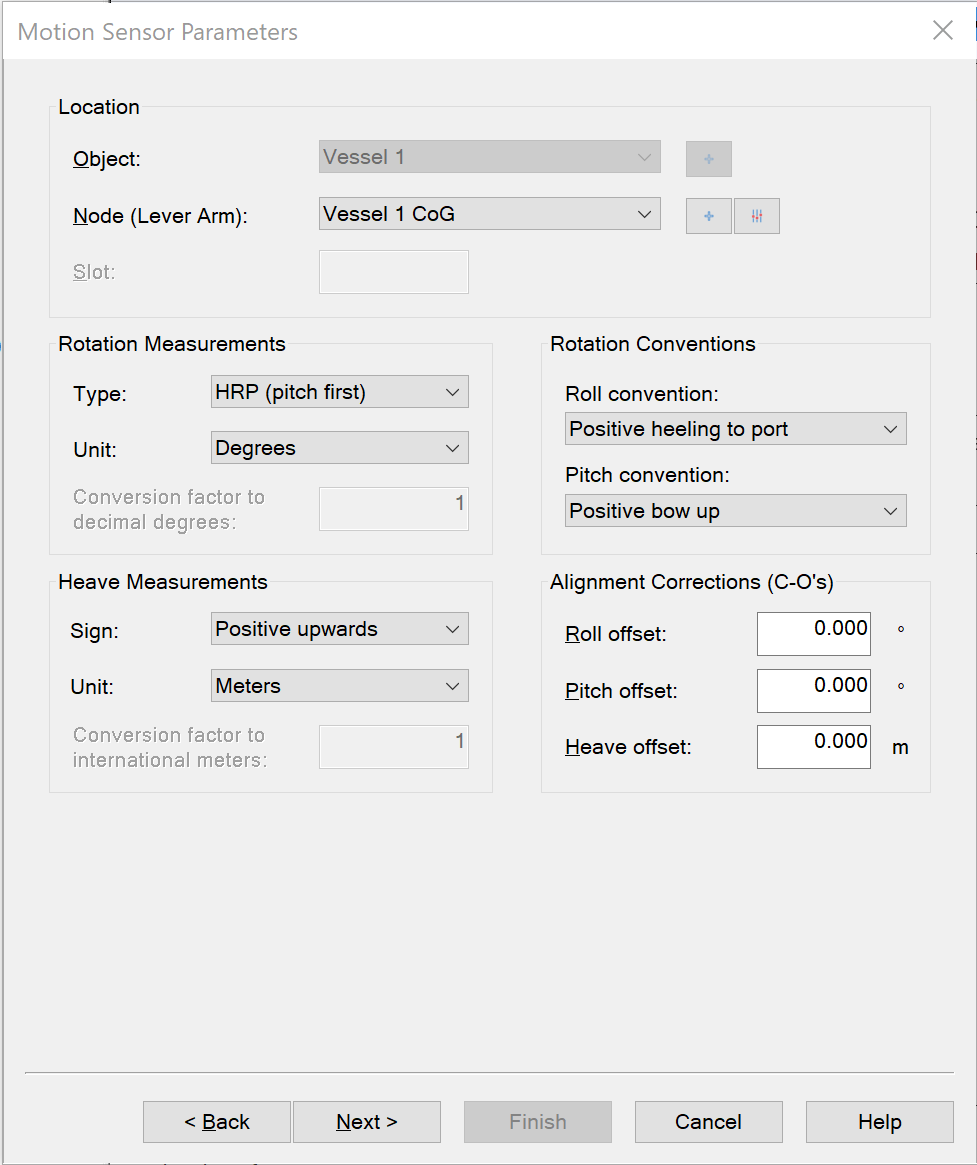
For the motion settings the defaults should also be correct as we suggest to enter the C-O values in the motion sensor.
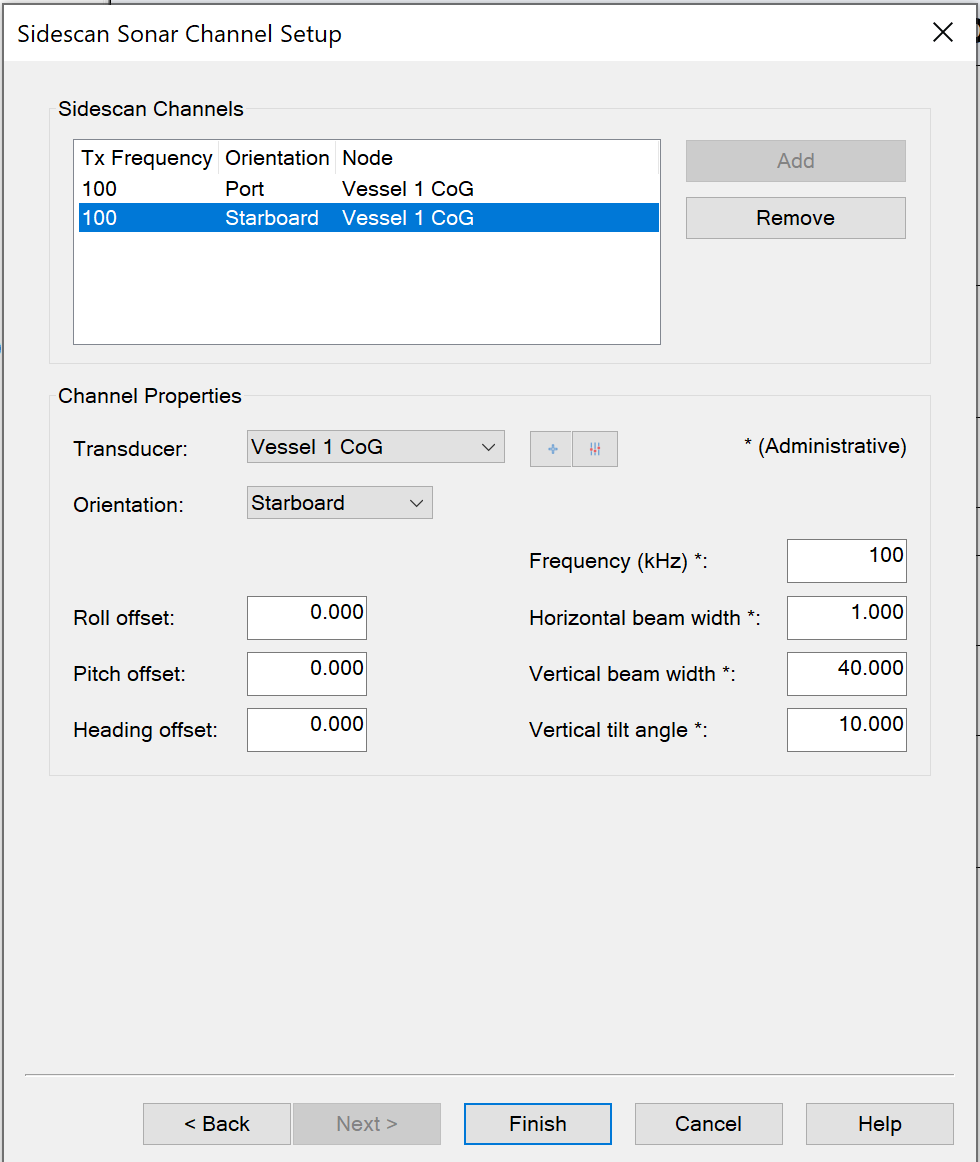
For the Sidescan sonar systems the Sidescan channels need to be set up.
When adding the channels its the orientation needs to be set to port and starboard.
When all systems are added the hydro-tech driver should be ready to be used.
Qinsy Online