Mission planning software
The exported Google KML file from the Survey Manager can be imported into the mission planning software. The software will get the waypoints (Easting and Northing) from the KML file.
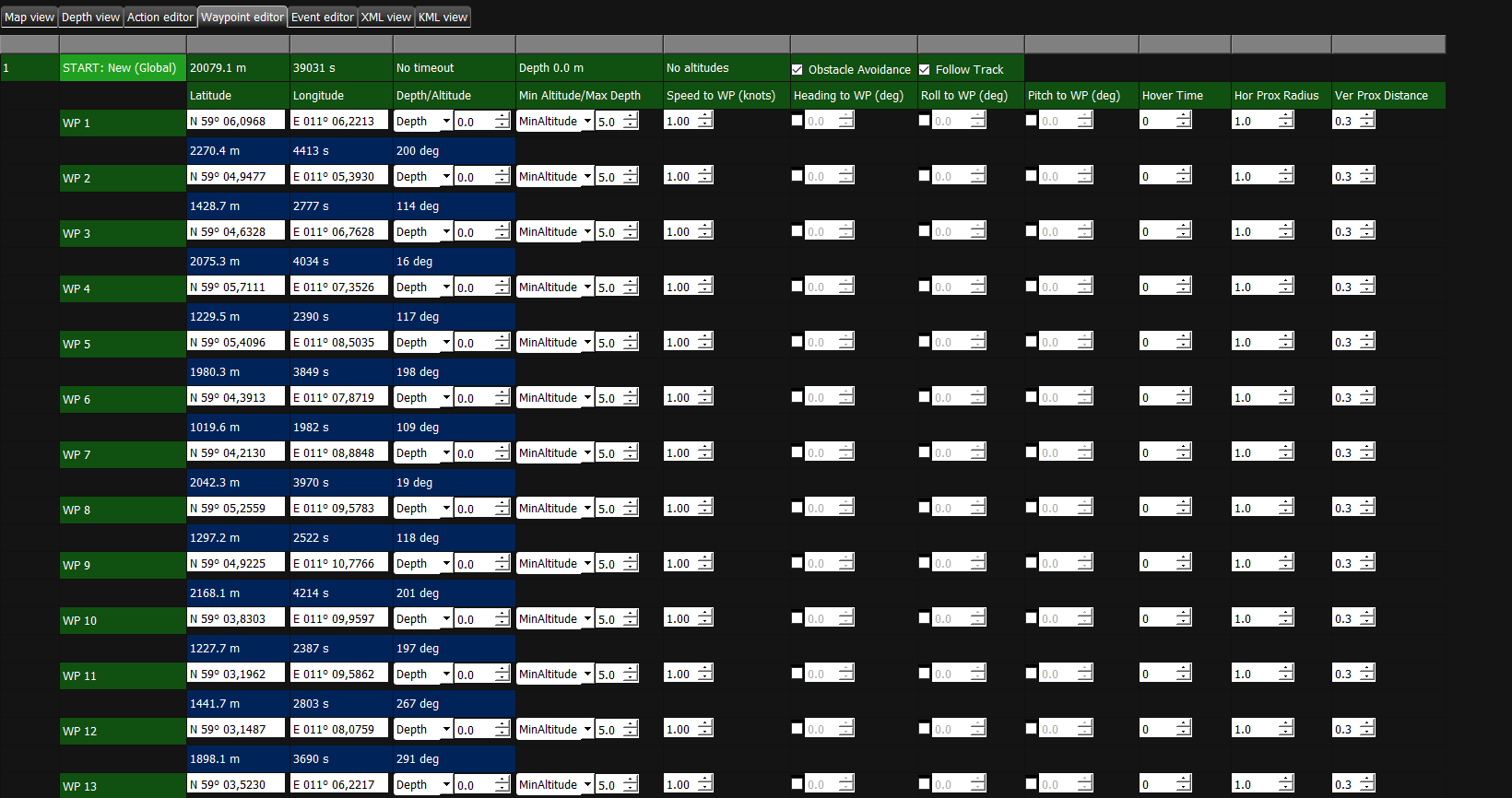
Additional tasks like depth, altitude or roll can be added to the mission in the Waypoint editor.
In the Action editor of the software it is possible to define the systems that are used during a trial between waypoints.
It is possible to define for every line, which systems are turned on at which frequency.
When the setup of the mission is done, is it possible to save the mission and import it in the control software of the AUV.
During the mission, the control software will send tasks to Qinsy.