
How-to Deep Water Multibeam
This document describes how to set up Qinsy for usage with deep water multibeam systems.
For example: Kongsberg EM120, EM122, EM300, EM302, EM710 or Reson 7150, 7160.
On this page:
Driver
Open Database Setup and select the valid driver for your system:
For the:
- EM120 and EM300: select the EM3002 rho-theta driver
- EM122, EM302, EM710: select the driver Kongsberg EM2040/EM710/EM302/EM122
- Resons: select the driver "Reson Sebat 7K TCP (Network)"
Transducer setup
Select on the second page for setting transducer setup “Separate transmit (TX) and receive (RX) elements".
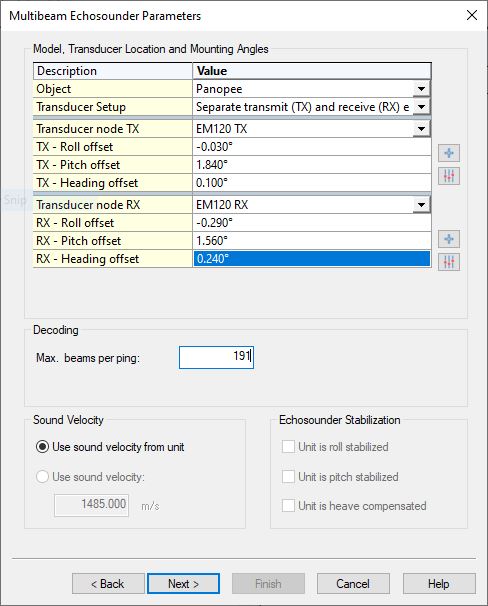
Define nodes for both the RX and TX transducer centers. Also enter mounting angles for both transducers.
The stabilized options are all unchecked and disabled and this is ok. The Deep Water Multibeam systems all use stabilization for pitch/roll and yaw but since the magnitude of the applied stabilization is reported to Qinsy too, it is taken into account in the algorithms and these options are ignored.
Update Rate
Qinsy can buffer up to 500 Gyro and/or Motion Reference Unit (MRU) observations and 100 Position system observations. This fixed number determines, together with the update rate of the sensor, for how many seconds data is buffered. For deep water it is important that at least 15 seconds of motion data is buffered, this of course because of the long travel times.
So make sure that Gyros and MRU update at a maximum of 30 Hz and the positioning system at a maximum of 2 HZ.
If Gyros or MRUs update too fast then it can happen that the footprint results will not be calculated at all or the attitude is not correctly applied. This will become apparent in the Swath System display by the swath showing “roof tile” steps artifacts.
The Update Rate of the sensors can be witnessed in the Observation Physics display.
Sound Velocity
Note that the Sound Velocity always increments with depth (pressure). Usually Sound Velocity profile dips will not go any deeper than 1500 meters. For improved depth calculation we advise strongly to add an extra manual Sound Velocity entry at 12000 meters depth of 1669 m/s.